电磁感应与电路 知识点题库
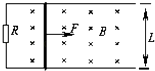
如图所示,相距L=0.4m、电阻不计的两平行光滑金属导轨水平放置,一端与阻值R=0.15Ω的电阻相连,导轨处于磁感应强度B=0.5T的匀强磁场中,磁场方向垂直于导轨平面.质量m=0.1kg、电阻r=0.05Ω的金属棒置于导轨上,并与导轨垂直.t=0时起棒在水平外力F作用下以初速度v0=2m/s、加速度a=1m/s2沿导轨向右匀加速运动.求:
-
(1) t=2s时回路中的电流;
-
(2) t=2s时外力F大小;
-
(3) 第2s内通过棒的电荷量.
如图所示,两根和水平方向成α角的光滑平行的金属轨道,上端接有可变电阻R,下端足够长,空间垂直于轨道平面的匀强磁场,磁感应强度为B,一质量为m的金属杆从轨道上由静止滑下,经过足够长时间后,金属杆的速度会达到最大值vm , 则( )
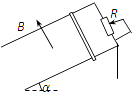
A . 如果B增大,vm将变大
B . 如果α增大,vm将变大
C . 如果R增大,vm将变大
D . 如果m减小,vm将变大
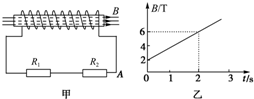
如图甲所示,螺线管线圈的匝数n=1500匝,横截面积S=20cm2 , 导线的总电阻r=2.0Ω,R1=3.0Ω,R2=25Ω。穿过螺线管的磁场的磁感应强度B按图乙所示规律变化,求:
-
(1) 线圈产生的感应电动势大小;
-
(2) R2消耗的电功率。
如图所示,由某种粗细均匀的金属条制成的矩形线框abcd固定在纸面内,匀强磁场垂直纸面向里。一导体棒PQ放在线框上,在水平拉力F作用下沿平行ab的方向匀速滑动,滑动过程PQ始终与ab垂直,且与线框接触良好,不计摩擦。在PQ从靠近ad处向bc滑动的过程中( )
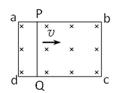
A . 通过PQ的电流先增大后减小
B . PQ两端电压先增大后减小
C . 拉力F的功率先减小后增大
D . 通过ad的电流先增大后减小
如图所示的区域内有垂直于纸面的匀强磁场,磁感应强度为B。电阻为R、半径为L、圆心角为45°的扇形闭合导线框绕垂直于纸面的O轴以角速度ω匀速转动(O轴位于磁场边界)。则线框内产生的感应电流的有效值为 

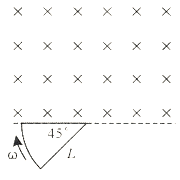
A .  B .
B .  C .
C .  D .
D . 
B .
C .
D .
如图所示,宽度为L的金属框架竖直固定在绝缘地面上,框架的上端接有一特殊的电子元件,如果将其作用等效成一个电阻,则其阻值与其两端所加的电压成正比,即等效电阻  ,式中k为恒量。框架上有一质量为m的金属棒水平放置,金属棒与光滑框架接触良好,离地高度为h,磁感应强度为B的匀强磁场与框架平面垂直。将金属棒由静止释放,棒沿框架向下运动。其它电阻不计,问:
,式中k为恒量。框架上有一质量为m的金属棒水平放置,金属棒与光滑框架接触良好,离地高度为h,磁感应强度为B的匀强磁场与框架平面垂直。将金属棒由静止释放,棒沿框架向下运动。其它电阻不计,问:
,式中k为恒量。框架上有一质量为m的金属棒水平放置,金属棒与光滑框架接触良好,离地高度为h,磁感应强度为B的匀强磁场与框架平面垂直。将金属棒由静止释放,棒沿框架向下运动。其它电阻不计,问: 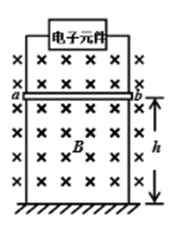
-
(1) 金属棒运动过程中,流过棒的电流多大?方向如何?
-
(2) 金属棒经过多长时间落到地面?
-
(3) 金属棒从释放到落地过程中在电子元件上消耗的电能多大?
有人设计了可变阻尼的电磁辅助减震系统,由三部分组成。下部分是电磁侦测系统:-部分是可变电磁阻尼系统,吸收震动时的动能:控制系统接收侦测系统的信号,改变阻尼磁场的强弱。系统如图(1)所示,侦测线框、阻尼线圈固定在汽车底盘上,侦测系统磁体、减震系统磁体固定在车轴上,车轴与底盘通过一减震弹簧相连。侦测系统磁场为匀强磁场,B1=0.01T,
长方形线框宽d=0.05m,整个回路的电阻  ,运动过程中,线框的下边不会离开磁场,上边不会进入磁场。阻尼线圈由100个相互绝缘的独立金属环组成,这100个金属环均匀固定在长为0.2m的不导电圆柱体上,减震系.统磁场辐向分布,俯视如图(2)所示,线圈所在位置磁感应强度B2大小处处相等,大小由控制系统控制。汽车静止时,阻尼线圈恰好50匝处于磁场中,取此时侦测线框所在的位置为原点,取向下为正,线框相对侦测磁场的位移记为x,B2 的大小与x的关系如图(3)所示。每个线圈的电阻为
,运动过程中,线框的下边不会离开磁场,上边不会进入磁场。阻尼线圈由100个相互绝缘的独立金属环组成,这100个金属环均匀固定在长为0.2m的不导电圆柱体上,减震系.统磁场辐向分布,俯视如图(2)所示,线圈所在位置磁感应强度B2大小处处相等,大小由控制系统控制。汽车静止时,阻尼线圈恰好50匝处于磁场中,取此时侦测线框所在的位置为原点,取向下为正,线框相对侦测磁场的位移记为x,B2 的大小与x的关系如图(3)所示。每个线圈的电阻为  ,周长L=0.3m。不考虑阻尼线圈之间的电磁感应,忽略阻尼线圈导体的粗细,设车轴与底盘总保持平行。
,周长L=0.3m。不考虑阻尼线圈之间的电磁感应,忽略阻尼线圈导体的粗细,设车轴与底盘总保持平行。
,运动过程中,线框的下边不会离开磁场,上边不会进入磁场。阻尼线圈由100个相互绝缘的独立金属环组成,这100个金属环均匀固定在长为0.2m的不导电圆柱体上,减震系.统磁场辐向分布,俯视如图(2)所示,线圈所在位置磁感应强度B2大小处处相等,大小由控制系统控制。汽车静止时,阻尼线圈恰好50匝处于磁场中,取此时侦测线框所在的位置为原点,取向下为正,线框相对侦测磁场的位移记为x,B2 的大小与x的关系如图(3)所示。每个线圈的电阻为 ,周长L=0.3m。不考虑阻尼线圈之间的电磁感应,忽略阻尼线圈导体的粗细,设车轴与底盘总保持平行。 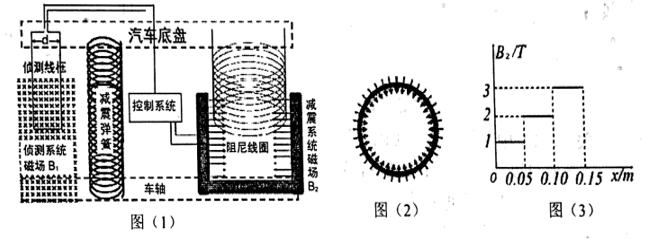
-
(1) 侦测线框向下运动时电流的方向为顺时针还是逆时针?
-
(2) 写出侦测线框由平衡位置向下运动时,侦测线框流入控制系统的电量q与位移x的大小关系式:
-
(3) 某次侦测线框由平衡位置向下运动,流入控制系统的电量
 ,这一过程底盘相对车轴做v=10m/s的匀速运动,求这-过程阻尼线圈吸收了多少机械能;
,这一过程底盘相对车轴做v=10m/s的匀速运动,求这-过程阻尼线圈吸收了多少机械能;
-
(4) 某次侦测线框由平衡位置向下运动,流入控制系统的电量
 ,求这一过程中安培力对阻尼线圈的总冲量。
,求这一过程中安培力对阻尼线圈的总冲量。
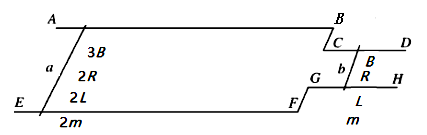
如图所示,在光滑的水平金属轨道ABCD-EFGH内有竖直向上的匀强磁场,左侧宽轨道处磁感应强度为3B,右侧窄轨道处磁感应强度为B,AB与EF宽为2L,CD与GH宽为 L,金属棒a、b质量分别为2m和m,电阻分别为2R和R.最初两棒均静止,若给棒a初速度v0向右运动,假设轨道足够长,棒a只在轨道AB与EF上运动.求:
-
(1) 金属棒a、b的最终速度;
-
(2) 整个过程中通过金属棒a的电量;
-
(3) 整个过程中金属棒a上产生的焦耳热.
如图1所示,两条平行实线间存在垂直于纸面向里的匀强磁场,磁感应强度为B=1T.一总电阻为r=0.2Ω的圆形线圈从靠近左侧实线的位置开始向右做匀速直线运动.圆形线圈产生的感应电动势随时间变化的图线如图2所示.下列说法正确的是( )
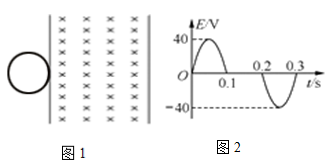
A . 圆形线圈的半径为R=1 m
B . 圆形线圈运动速度的大小为v=20m/s
C . 两实线之间的水平距离L=6m
D . 在0.05 s,圆形线圈所受的安培力大小为400 N
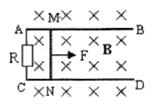
如图所示,两个平行光滑金属导轨AB、CD固定在水平地面上,其间距L=0.5m,左端接有阻值R=3Ω的定值电阻。一根长度与导轨间距相等的金属杆順置于导轨上,金属 杆的质量m=0.2kg,电阻r=2Ω,整个装置处在方向竖直向下、磁感应强度大小B=4T的匀强磁场中,t=0肘刻,在MN上加 一与金属杆垂直,方向水平向右的外力F,金属杆由静止开始 以a=2m/s2的加速度向右做匀加速直线运动,2s末撤去外力F,运动过程中金属杆与导轨始终垂直且接触良好。(不计导轨和连接导线的电阻,导轨足够长)求:
-
(1) 1s末外力F的大小;
-
(2) 撤去外力F后的过程中,电阻R上产生的焦耳热。
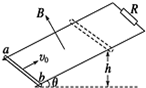
如图所示,两根足够长且电阻不计的光滑平行金属导轨与水平面之间的倾角  ,两导轨间距离为L,下端接有阻值为R的电阻。导轨上质量为m、长度为L,电阻为R的金属棒
,两导轨间距离为L,下端接有阻值为R的电阻。导轨上质量为m、长度为L,电阻为R的金属棒  与一个上端固定、劲度系数为k的轻质绝缘弹簧相接,整个装置处于磁感应强度为B匀强磁场中,磁场方向垂直斜面向上。现金属棒从弹簧原长处获得初速度
与一个上端固定、劲度系数为k的轻质绝缘弹簧相接,整个装置处于磁感应强度为B匀强磁场中,磁场方向垂直斜面向上。现金属棒从弹簧原长处获得初速度  开始运动,假设金属棒运动过程中始终与导轨垂直并保持良好接触,弹簧始终在弹性限度内,重力加速度为g,则( )
开始运动,假设金属棒运动过程中始终与导轨垂直并保持良好接触,弹簧始终在弹性限度内,重力加速度为g,则( )
,两导轨间距离为L,下端接有阻值为R的电阻。导轨上质量为m、长度为L,电阻为R的金属棒 与一个上端固定、劲度系数为k的轻质绝缘弹簧相接,整个装置处于磁感应强度为B匀强磁场中,磁场方向垂直斜面向上。现金属棒从弹簧原长处获得初速度 开始运动,假设金属棒运动过程中始终与导轨垂直并保持良好接触,弹簧始终在弹性限度内,重力加速度为g,则( ) 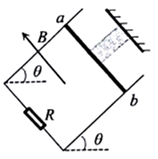
A . 开始运动时金属棒的加速度一定为  B . 开始运动时金属棒两端的电压为
B . 开始运动时金属棒两端的电压为  C . 金属棒 最终将停在与初始位置距离
C . 金属棒 最终将停在与初始位置距离  D . 电阻R产生的总热量小于
D . 电阻R产生的总热量小于 
B . 开始运动时金属棒两端的电压为
C . 金属棒 最终将停在与初始位置距离
D . 电阻R产生的总热量小于
如图所示,一粗糙的平行金属轨道平面与水平面成θ角,两轨道上端用一电阻R相连,该装置处于匀强磁场中,磁场方向垂直于轨道平面向上。质量为m的金属杆ab以初速度v0从轨道底端向上滑行,滑行到某高度h后又返回到底端。若运动过程中金属杆始终保持与导轨垂直且接触良好,轨道与金属杆的电阻均忽略不计。则下列说法正确的是( )
A . 金属杆ab上滑过程与下滑过程通过电阻R的电量一样多
B . 金属杆ab上滑过程与下滑过程产生的焦耳热一定相等
C . 金属杆ab在整个过程中损失的机械能等于装置产生的焦耳热
D . 金属杆ab上滑过程中克服安培力与摩擦力做功之和等于 
如图所示,在斜面的虚线以下有垂直斜面向下的匀强磁场,甲、乙两个正方形闭合线框是用相同材料的电阻丝围成的,边长相等,电阻丝的横截面积之比为2:1,放在粗糙斜面上从同一高度由静止释放,下滑过程中线框不发生转动。则( )
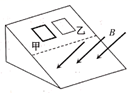
A . 俯视两线框进入磁场的过程中,感应电流都是逆时针方向
B . 从开始运动到滑至斜面底端,甲线框比乙线框所用时间短
C . 两线框刚进入磁场瞬间,甲、乙中感应电流之比为2:1
D . 下滑全过程中,甲、乙两线框机械能减少量之比为2:1
如图所示,间距为L的光滑平行金属导轨弯成“∠"形,底部导轨面水平,倾斜部分与水平面成θ角,导轨与固定电阻相连,整个装置处于竖直向上、磁感应强度大小为B的匀强磁场中。导体棒ab与cd均垂直于导轨放置,且与导轨接触良好,两导体棒的电阻皆与阻值为R的固定电阻相等,其余部分电阻不计。当导体棒cd沿导轨向右以速度。匀速滑动时,导体棒ab恰好在倾斜导轨上处于静止状态,导体棒ab的重力为mg,则( )
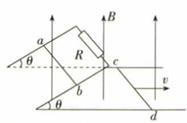
A . 导体棒cd两端的电压大小为BLv
B . t时间内通过导体棒cd横截面的电荷量为  C . cd棒克服安培力做功的功率为
C . cd棒克服安培力做功的功率为  D . 导体棒ab所受安培力为mg sin θ
D . 导体棒ab所受安培力为mg sin θ
C . cd棒克服安培力做功的功率为
D . 导体棒ab所受安培力为mg sin θ
如图所示,U型导体框固定在水平面内,一匀强磁场竖直向下穿过导体框,导体棒ab垂直放在框上,以初速度v0水平向右运动,运动距离为L时停在框上。已知棒的质量为m,阻值为R,导体框的电阻不计。则下列说法正确的是( )
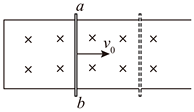
A . 棒中感应电流的方向由a到b
B . 棒上产生的焦耳热一定为 C . 棒克服安培力所做的功可能小于
D . 当棒速度为
C . 棒克服安培力所做的功可能小于
D . 当棒速度为 时,运动距离一定为
时,运动距离一定为
C . 棒克服安培力所做的功可能小于
D . 当棒速度为时,运动距离一定为
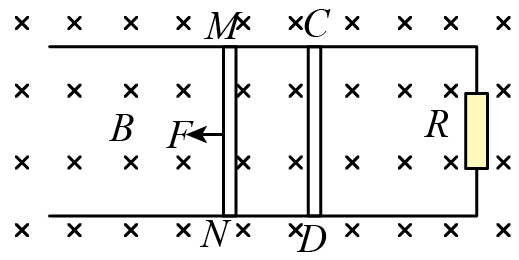
如图所示,间距L=0.4m的两条足够长的平行金属导轨右端连接有一阻值R=6Ω的定值电阻,整个装置被固定在绝缘水平面上,整个空间存在垂直于导轨平面向下的匀强磁场,磁感应强度大小B=2.5T。质量均为m=0.2kg、电阻均为r=3Ω、长度均为L=0.4m的金属棒MN、CD垂直放在导轨上,金属棒CD与导轨间的动摩擦因数μ=0.2,现给金属棒MN施加一水平向左的作用力F,使金属棒MN从静止开始以加速度大小a=5m/s2做匀加速直线运动,当金属棒CD将要发生滑动时撤去力F。取重力加速度大小g=10m/s2 , 导轨的电阻不计,金属棒CD与导轨间的最大静摩擦力与滑动摩擦力相等,金属棒MN与导轨间的摩擦力忽略不计,求:
-
(1) 撤去力F的瞬间,通过定值电阻的电流;
-
(2) 力F的最大功率;
-
(3) 撤去力F后定值电阻上产生的热量。
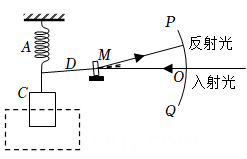
光点式检流计是一种可以测量微小电流的仪器,其简化的工作原理示意图如图所示。图中A为轻质绝缘弹反簧,C为位于纸面上的线圈,虚线框内有与纸面垂直的匀强磁场;随为置于平台上的轻质小平面反射镜,轻质刚性细杆D的一端与M固连且与镜面垂直,另一端与弹簧下端相连,  为圆弧形的、带有均匀刻度的透明读数条, 的圆心位于M的中心使用前需调零,使线圈内没有电流通过时,M竖直且与纸面垂直;入射细光束沿水平方向经 上的O点射到M上后沿原路反射。线圈通入电流后弹簧长度改变,使M发生倾斜,入射光束在M上的入射点仍近似处于 的圆心,通过读取反射光射到 上的位置,可以测得电流的大小。已知弹簧的劲度系数为k,磁场磁感应强度大小为B,线圈C的匝数为N。沿水平方向的长度为l,细杆D的长度为d,圆弧 的半径为r﹐
为圆弧形的、带有均匀刻度的透明读数条, 的圆心位于M的中心使用前需调零,使线圈内没有电流通过时,M竖直且与纸面垂直;入射细光束沿水平方向经 上的O点射到M上后沿原路反射。线圈通入电流后弹簧长度改变,使M发生倾斜,入射光束在M上的入射点仍近似处于 的圆心,通过读取反射光射到 上的位置,可以测得电流的大小。已知弹簧的劲度系数为k,磁场磁感应强度大小为B,线圈C的匝数为N。沿水平方向的长度为l,细杆D的长度为d,圆弧 的半径为r﹐  ,d远大于弹簧长度改变量的绝对值。
,d远大于弹簧长度改变量的绝对值。
为圆弧形的、带有均匀刻度的透明读数条, 的圆心位于M的中心使用前需调零,使线圈内没有电流通过时,M竖直且与纸面垂直;入射细光束沿水平方向经 上的O点射到M上后沿原路反射。线圈通入电流后弹簧长度改变,使M发生倾斜,入射光束在M上的入射点仍近似处于 的圆心,通过读取反射光射到 上的位置,可以测得电流的大小。已知弹簧的劲度系数为k,磁场磁感应强度大小为B,线圈C的匝数为N。沿水平方向的长度为l,细杆D的长度为d,圆弧 的半径为r﹐ ,d远大于弹簧长度改变量的绝对值。
-
(1) 若在线圈中通入的微小电流为I,求平衡后弹簧长度改变量的绝对值
 及 上反射光点与O点间的弧长s;
及 上反射光点与O点间的弧长s;
-
(2) 某同学用此装置测一微小电流,测量前未调零,将电流通入线圈后, 上反射光点出现在O点上方,与O点间的弧长为
 、保持其它条件不变,只将该电流反向接入,则反射光点出现在О点下方,与O点间的弧长为
、保持其它条件不变,只将该电流反向接入,则反射光点出现在О点下方,与O点间的弧长为  。求待测电流的大小。
。求待测电流的大小。
如图所示,abcd线圈中接有一灵敏电流计 , efgh线框的电阻不计,放在匀强磁场中、具有一定电阻的导体棒MN在恒力
, efgh线框的电阻不计,放在匀强磁场中、具有一定电阻的导体棒MN在恒力 作用下由静止开始向右运动,efgh线框足够长。已知穿过闭合回路的磁通量变化越快,回路中的感应电流越大,则通过灵敏电流计中的感应电流( )
作用下由静止开始向右运动,efgh线框足够长。已知穿过闭合回路的磁通量变化越快,回路中的感应电流越大,则通过灵敏电流计中的感应电流( )
, efgh线框的电阻不计,放在匀强磁场中、具有一定电阻的导体棒MN在恒力作用下由静止开始向右运动,efgh线框足够长。已知穿过闭合回路的磁通量变化越快,回路中的感应电流越大,则通过灵敏电流计中的感应电流( )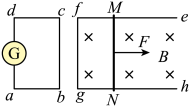
A . 方向 到d,强度逐渐增强
B . 方向d到 , 强度逐渐增强
C . 方向到d,强度逐渐减弱
D . 方向d到 , 强度逐渐减弱
到d,强度逐渐增强
B . 方向d到 , 强度逐渐增强
C . 方向到d,强度逐渐减弱
D . 方向d到 , 强度逐渐减弱
到d,强度逐渐增强
B . 方向d到 , 强度逐渐增强
C . 方向到d,强度逐渐减弱
D . 方向d到 , 强度逐渐减弱
如图所示,电阻不计的平行金属导轨PQ、MN固定在倾角α=37°的绝缘斜面上,导轨下端接R0=2 的电阻,导轨间的距离d=1m。磁感应强度B=1T的匀强磁场垂直穿过导轨平面,两导体棒a、b的质量均为m=1kg,接入电路的电阻均为R1=1 , 导体棒a与导轨间的动摩擦因数μ1=0.8,导体棒b与导轨间的动摩擦因数μ2=0.5,开始时导体棒a静止在导轨上,现让b棒从a棒上方一定距离的导轨上由静止释放,当a棒刚要开始运动时,a、b棒恰好相碰,碰后并联在一起向下运动。a、b棒始终与导轨垂直并保持良好的接触。已知sin37°=0.6,cos37°=0.8,g取10m/s2。求:
的电阻,导轨间的距离d=1m。磁感应强度B=1T的匀强磁场垂直穿过导轨平面,两导体棒a、b的质量均为m=1kg,接入电路的电阻均为R1=1 , 导体棒a与导轨间的动摩擦因数μ1=0.8,导体棒b与导轨间的动摩擦因数μ2=0.5,开始时导体棒a静止在导轨上,现让b棒从a棒上方一定距离的导轨上由静止释放,当a棒刚要开始运动时,a、b棒恰好相碰,碰后并联在一起向下运动。a、b棒始终与导轨垂直并保持良好的接触。已知sin37°=0.6,cos37°=0.8,g取10m/s2。求:
的电阻,导轨间的距离d=1m。磁感应强度B=1T的匀强磁场垂直穿过导轨平面,两导体棒a、b的质量均为m=1kg,接入电路的电阻均为R1=1 , 导体棒a与导轨间的动摩擦因数μ1=0.8,导体棒b与导轨间的动摩擦因数μ2=0.5,开始时导体棒a静止在导轨上,现让b棒从a棒上方一定距离的导轨上由静止释放,当a棒刚要开始运动时,a、b棒恰好相碰,碰后并联在一起向下运动。a、b棒始终与导轨垂直并保持良好的接触。已知sin37°=0.6,cos37°=0.8,g取10m/s2。求: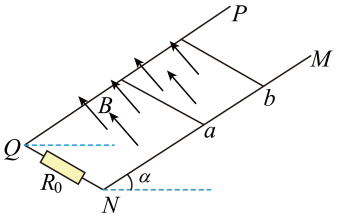
-
(1) a棒刚要开始运动时,b棒的速度大小;
-
(2) a、b棒相碰后一起下滑过程中最大速度的大小;
-
(3) 若两棒相碰后,经过t=7s已经达到最大速度,这段时间内电路中电阻产生的焦耳热量。
如图所示,在方向竖直向下、磁感应强度为B的匀强磁场中,沿水平面固定一个V字型光滑金属框架 , 已知
, 已知 , 导体棒
, 导体棒 在框架上从A点开始在外力作用下,沿垂直方向以速度v匀速向右平移,使导体棒和框架始终构成等边三角形回路,经过时间t导体棒运动到图示位置。已知框架和导体棒的材料和横截面积均相同,其单位长度的电阻均为r,框架和导体棒均足够长,导体棒运动中始终与磁场方向垂直,且与框架接触良好。求:
在框架上从A点开始在外力作用下,沿垂直方向以速度v匀速向右平移,使导体棒和框架始终构成等边三角形回路,经过时间t导体棒运动到图示位置。已知框架和导体棒的材料和横截面积均相同,其单位长度的电阻均为r,框架和导体棒均足够长,导体棒运动中始终与磁场方向垂直,且与框架接触良好。求:
, 已知 , 导体棒在框架上从A点开始在外力作用下,沿垂直方向以速度v匀速向右平移,使导体棒和框架始终构成等边三角形回路,经过时间t导体棒运动到图示位置。已知框架和导体棒的材料和横截面积均相同,其单位长度的电阻均为r,框架和导体棒均足够长,导体棒运动中始终与磁场方向垂直,且与框架接触良好。求:![]()
-
(1) t时刻回路的总电阻;
-
(2) t时刻流过导体棒的电流大小。
最近更新
- 设集合,集合,则等于( ) A、 B、 C、 D、
- (二)阅读下面的一篇文章,回答问题。(14分)海尔曼博士是位医术高超、医德高尚的大夫。他开的诊所已远近闻名,在布拉沙市里
- 下列化学用语正确的是 A.CO2的结构式:O=C=O B.葡萄糖和淀粉的实验式均为:CH2O C.N2H4的电子式:
- 古代希腊文明的发源和兴盛依托的是 A.大河 B.肥沃的陆地 C.海洋
- 下列叙述正确的是() A.DNA中鸟嘌呤的数量总是等于胸腺嘧啶的数量 B.细胞中不同的氨基酸可以由同一种tRNA携带 C
- 右图为中央气象台发布的某日我国地质灾害指数和限电指数分布图,读图回答18~19题。18.若图中所示现象同时出现,则最有可
- 名篇名句默写(本题共1个小题,5分) 补写出下列句子中的空缺部分。(5分) (1)《烛之武退秦师》中晋文公认为_____
- 开启海外追逃常态化。12月1日,由最高法、最高检、公安部、外交部联合发布的“自首通告”正式期满,在此前的52天内,已有1
- 下列叙述错误的是 ( ) A.钢铁表面发生吸氧腐蚀时,钢铁表面水膜的pH增大 B.电解精炼铜,
- 为了得到函数的图象,只需把函数的图象上所有的点 A.向右平移个单位
- 为探究高温对酶活性的影响,某同学设计了如下实验: (1)实验过程与结果: ①取两支洁净试管,分别编号为1和2。 ②在1号
- 在反应前后有化合价的反应是氧化还原反应.已知:Cu+2FeCl3═2FeCl2+CuCl2,则铁与氯化铁溶液反应的化学方
- — Sara is sick, so sheis unable to go fishing with us
- 19世纪70年代,德、法两国相继颁布了新宪法。两部宪法内容的共同之处是( ) A.国家元首独掌行政大权
- ______ is even more important is that water began to appear
- A. lookB. zoo C.school
- 如图所示,为早期制作的发电机及电动机的示意图,A盘和B盘分别是两个可绕固定转轴转动的铜盘,用导线将A盘的中心和B盘的边缘
- “最适合人居住的城市”,“一座来了就不想离开的城市”,人们用最美的赞誉形容成都市翻天覆地的巨变。巨变源自成都市坚持“四位
- 观察下面漫画《伤自尊》,从中你能认识和感悟到 ①贫困生的自尊得到了更好的维护 ②贫困生需要物质帮助,但他们的自尊更需要维
- 下列关于糖类的叙述,正确的是( ) A. 淀粉可以被小肠上皮细胞直接吸收 B. 葡萄糖



