第4节 平衡条件的应用 知识点题库
如图,小物块P位于光滑斜面上,斜面Q位于光滑水平地面上,小物块P从静止开始沿斜面下滑的过程中( )
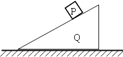
A . 斜面静止不动
B . 物块P对斜面的弹力对斜面做正功
C . 物块P的机械能守恒
D . 斜面对P的弹力方向不垂直于接触面
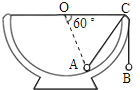
如图,一个半径为R的半球形的碗固定在桌面上,碗口水平,O点为其球心,碗的内表面及碗口是光滑的.一根轻质细线跨在碗口上,线的两端分别系有小球A和B , 当它们处于平衡状态时,小球A与O点的连线与水平线的夹角为60°.
-
(1) 求小球A与小球B的质量比mA:mB
-
(2) 现将A球质量改为2m、B球质量改为m , 且开始时A球位于碗口C点,由静止沿碗下滑,当A球滑到碗底时,求两球总的重力势能改变量;(B球未碰到碗壁)
-
(3) 在(2)条件下,当A球滑到碗底时,求B球的速度大小.
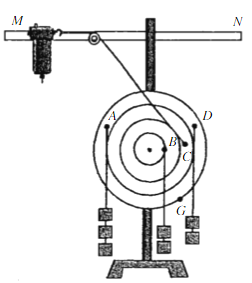
改进后的“研究有固定转动轴物体平衡条件”的实验装置如图所示,力传感器、定滑轮固定在横杆上,替代原装置中的弹簧秤,已知力矩盘上各同心圆的间距均为5cm。
-
(1) (多选题)做这样改进的有点是( )A . 力传感器既可测拉力又可测压力 B . 力传感器测力时不受主观判断影响,精确度高 C . 能消除转轴摩擦力引起的实验误差 D . 保证力传感器所受拉力方向不变
-
(2) 某同学用该装置做实验,检验时发现盘停止转动时G点始终在最低处,他仍用该盘做实验。在对力传感器进行调零后,用力传感器将力矩盘的G点 拉到图示位置,此时力传感器读数为3N。再对力传感器进行调零,然后悬挂钩码进行实验,此方法 (选填“能”、“不能”)消除力矩盘偏心引 起的实验误差,已知每个钩码所受重力为1N,力矩盘按图示方式悬挂钩码后,力矩盘所受顺时针方向的合力矩为 Nm。力传感器的读数为 N.
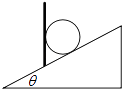
如图所示,把皮球放在倾角θ=30o的光滑斜面上,用一竖直挡板使之处于平衡状态,此时斜面受到压力为F1 , 若撤去挡板时,斜面受到压力为F2 , 求F1和F2之比.
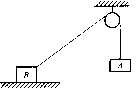
如图所示,A、B两物体的质量分别为mA和mB , 且mA>mB , 整个系统处于静止状态,滑轮的质量和一切摩擦均不计,如果绳一端由P点缓慢地向右移动到Q点,整个系统重新平衡后,物体A的高度和两滑轮间绳与水平方向的夹角θ如何变化( )
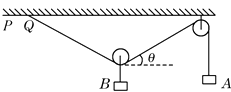
A . 物体A的高度升高,θ角变小
B . 物体A的高度降低,θ角不变
C . 物体A的高度升高,θ角不变
D . 物体A的高度降低,θ角变大
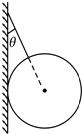
一个光滑小球用绳子拴在光滑的竖直墙面上,小球处于静止状态,其重力大小为G,绳子与竖直墙面的夹角为θ.
-
(1) 求小球对墙面的压力
-
(2) 若拴小球的绳子变长,绳子所受到的拉力大小如何变化.
如图所示,甲、丙物体在水平外力F的作用下静止在乙物体上,乙物体静止在水平面上.现增大水平外力F,三物体仍然静止,则下列说法正确的是( )
A . 乙对甲的支持力一定不变
B . 乙对地面的压力一定不变
C . 乙对甲的摩擦力一定增大
D . 甲对丙的摩擦力一直为零
如图所示,一根绳子一端固定于竖直墙上的A点,另一端绕过动滑轮P悬挂一重物B,其中绳子的PA段处于水平状态,另一根绳子一端与动滑轮P的轴相连,绕过光滑的定滑轮Q后在其端点O施加一水平向左的外力F,使整个系统处于平衡状态,滑轮均为光滑、轻质,且均可看做质点,现拉动绳子的端点O使其向左缓慢移动一小段距离后达到新的平衡状态,则该平衡状态与原平衡状态相比较( )
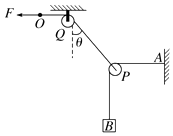
A . 拉力F增大
B . 角θ减小
C . 拉力FPA不变
D . 角θ不变
如图所示,A、B两物体用细绳相连跨过光滑轻小滑轮悬挂起来,B物体放在水平地面上,A、B两物体均静止。现将B物体稍向左移一点,A、B两物体仍静止,则此时与原来相比( )
A . 绳子拉力变大
B . 地面对物体B的支持力变小
C . 地面对物体B的摩擦力变大
D . 物体B受到的合力变大
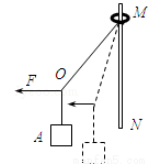
轻绳一端系在质量为m的物体A上,另一端系在一个套在粗糙竖直杆MN的圆环上。现用水平力F拉住绳子上的一点O,使物体A从图中实线位置缓慢下降到虚线位置,但圆环仍保持在原来位置不动。则在这一过程中,环对杆的摩擦力Ff将(选填“增大”“不变”或“减小”),环对杆的压力FN将 (选填“增大”、“不变”或“减小”)。
图(a)所示,一只小鸟沿着较粗的树枝从 A 缓慢移动到 B,将该过程抽象为质点从圆弧A 点移动到 B 点,如图(b),以下说法正确的是( )
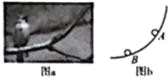
A . 树枝对小鸟的弹力减小,摩擦力减小
B . 树枝对小鸟的弹力增大,摩擦力减小
C . 树枝对小鸟的弹力增大,摩擦力增大
D . 树枝对小鸟的弹力减小,摩擦力增大
《大国工匠》节目中讲述了王进利用“秋千法”在1000kV的高压线上带电作业的过程。如图所示,绝缘轻绳OD一端固定在高压线杆塔上的O点,另一端固定在兜篮上。另一绝缘轻绳跨过固定在杆塔上C点的定滑轮,一端连接兜篮,另一端由工人控制。身穿屏蔽服的王进坐在兜篮里,缓慢地从C点运动到处于O点正下方E点的电缆处。绳OD一直处于伸直状态,兜篮、王进及携带的设备总质量为m,不计一切阻力,重力加速度大小为g。关于王进从C点运动到E点的过程中,下列说法正确的是( )
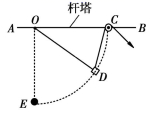
A . 工人对绳的拉力一直变大
B . 绳OD的拉力一直变小
C . OD,CD两绳拉力的合力大小等于mg
D . 当绳CD与竖直方向的夹角为30°时,工人对绳的拉力为 
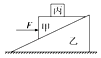
如图所示,在斜面上放两个光滑球A和B,两球的质量均为m(不随r改变),它们的半径分别是R和r,球A左侧有一垂直于斜面的挡板,两球沿斜面排列并静止,以下说法正确的是( )
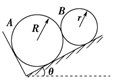
A . 斜面倾角θ一定,R>r时,R越大,r越小,B对斜面的压力越小
B . 斜面倾角θ一定,R=r时,两球之间的弹力最小
C . 斜面倾角θ一定时,A球对挡板的压力随着r减小而减小
D . 半径确定时,随着斜面倾角θ逐渐增大,A受到挡板作用力先增大后减小
如图所示,倾角为  的斜面静止在水平地面上,某时刻起当把斜面的倾角 角缓慢增大,在手机相对斜面仍然静止的过程中,则( )
的斜面静止在水平地面上,某时刻起当把斜面的倾角 角缓慢增大,在手机相对斜面仍然静止的过程中,则( )
的斜面静止在水平地面上,某时刻起当把斜面的倾角 角缓慢增大,在手机相对斜面仍然静止的过程中,则( ) 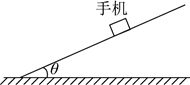
A . 手机受到的合外力增大
B . 手机受到的支持力不变
C . 手机受到的摩擦力增大
D . 斜面对手机的作用力增大
将两个质量均为m的小球a、b用细线相连后,再用细线悬挂于O点,如图所示。用力F拉小球b,使两个小球都处于静止状态,且细线Oa与竖直方向的夹角保持θ=30°,则F达到最小值时Oa绳上的拉力为( )
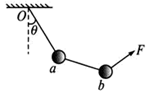
A .  B . mg
C .
B . mg
C .  D .
D . 
B . mg
C .
D .
如图,光滑的四分之一圆弧轨道AB固定在竖直平面内,A端与水平面相切,轨道上的小球在水平向右的力F作用下,缓慢地由A向B运动,轨道对球的弹力为N,则在运动过程中( )
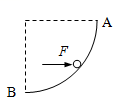
A . F增大
B . F减小
C . N增大
D . N减小
如图所示,垂直墙角有一个截面为半圆的光滑柱体,用细线拉住的小球静止靠在接近半圆底端的M点。通过细线将小球从M点缓慢向上拉至半圆最高点的过程中,细线始终保持在小球处与半圆相切。下列说法正确的是( )
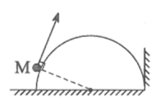
A . 细线对小球的拉力先增大后减小
B . 小球对柱体的压力先减小后增大
C . 柱体受到水平地面的支持力逐渐减小
D . 柱体对竖直墙面的压力先增大后减小
如图所示,轻杆A端用光滑水平铰链装在竖直墙面上,B端用轻绳吊一重物P,并用水平轻绳连接在墙C处,在水平向右的力F缓缓拉起重物P过程中,则( )
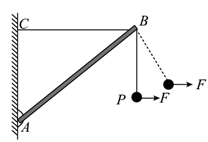
A . 吊重物的轻绳BP拉力一直变大
B . 水平向右的力F先变大再变小
C . 杆AB所受压力一直变大
D . 水平轻绳CB拉力先变小再变大
如图甲,一台空调外机用两个三角形支架固定在外墙上,空调外机的重心恰好在支架水平横梁OA和斜梁OB的连接点O的上方,图乙为示意图。如果把斜梁加长一点,仍保持连接点O的位置不变,横梁仍然水平,这时OA对O点的作用力F1和OB对O点的作用力F2将如何变化( )
![]()
A . F1变大,F2变大
B . F1变小,F2变小
C . F1变大,F2变小
D . F1变小,F2变大
一根水平固定的横杆上套有一质量为M的物体,物体通过一绝缘轻绳与一质量为m的带电小球(可看成点电荷)相连,在M的正下方,有一带电体Q(可看成点电荷)放在水平面上,如图所示。由于漏电,小球缓慢下摆,此过程中,M、Q一直保持静止。则在小球下摆的过程中,以下说法正确的是( )
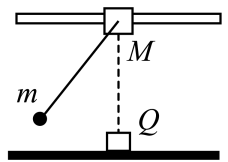
A . 横杆对M的支持力不变
B . M受到的摩擦力变小
C . Q受到的摩擦力变大
D . Q对水平面的压力变大
最近更新
- 设A=x2+2,B=2x,则 A.A>B
- 计算1﹣2+3﹣4+5﹣6+7﹣8+…+2009﹣2010的结果是() A.﹣1005 B.
- 由美国生物学家马古利斯(LynnMargulis)于1970年出版的《真核细胞的起源----共生起源假说》书中正式提出。
- 球面上有3个点,其中任意两点的球面距离都等于大圆周长的1/6,经过这3个点的小圆的周长为4π,那么这个球的半径为 A.4
- 细胞的分化、衰老和凋亡是普遍存在的生命现象。下列有关叙述正确的是 A.人体各种组织细胞的衰老是同步进行的 B.人的早期胚
- “外争国权,内惩国贼”、“废除二十一条”、“罢市救国”等口号和标语突出反映了五四运动体现出来的( ) A.民主与科
- 当缺乏氧气或有呼吸作用抑制剂时,生长素极性运输的速度将 A. 加快 B.减慢 C.不变
- 下列反应中,属于取代反应的是() ①CH3CHCH2+Br2CH3CHBrCH2Br②CH3CH2OHCH2CH2↑+H
- 吸烟有害健康,香烟的烟气中含有几百种对人体有害的物质,其中和一种是尼古丁,其化学式为C10H14N2,为了你的健康请不要
- 在森林中寻找药用人参、三七,只有在密林的下层才能找到。你认为影响人参、三七生长的主要因素是A.光照B.土壤C.空气D.温
- 胰岛素可以用于治疗糖尿病,但是胰岛素被注射到人体后,会堆积在皮下,要经过较长的时间才能进入血液,而进入血液的胰岛素又容易
- 自从国家诞生以来,人类就在民主与法制建设的道路上不断探索。尤其是步入近代社会以来,以法律为标志的资产阶级民主政治制度逐步
- 下列有关生活常识的说法中,正确的是( )A.用完后的废电池应回收集中处理B.天然果汁中不含任何化学物质C.“绿色冰箱”
- 《走一步,再走一步》(共4题,12分)时间一分一秒地过去,暮色开始四合。在一片寂静中,我伏在岩石上,恐惧和疲乏使我全身麻
- 电影《2012》中有这样一段场景:太阳异常活跃,不断向外喷射火焰,如图所示。同时我们可以听到它不停发出的爆破声。上述加点
- 科学家研究发现,用“汽水”浇灌植物能促进植物的生长,原因是“汽水”能( ) A、加强呼吸作用
- (几何证明选讲选做题)(本小题满分10分) 自圆O外一点引切线与圆切于点,为中点,过引割线交圆于,两点. 求证:.
- 党的十八届四中全会提出增强全民法治观念、推进法治社会建设的任务。增强全体公民的法治观念,需要公民 ①树立权利与义务统一的
- 下列有关诗词知识的理解不正确的一项是( ) A.古体诗,又称古诗、古风,多数通篇是五言或七言句,平仄没有严格规定
- 如图,圆O与离心率为的椭圆T:()相切于点M. ⑴求椭圆T与圆O的方程; ⑵过点M引两条互相垂直的两直线、与两曲线分别交



