第一节 科学探究:杠杆的平衡条件 知识点题库
使用下列简单机械,为了省力的是( )
A . 龙舟比赛用的船桨
B . 拔钉子的羊角锤
C . 理发用的剪刀
D . 旗杆顶的定滑轮
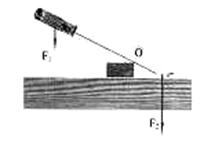
画出动力F1和阻力F2的力臂
人体就像一部复杂的机器,包含许多物理知识。
(1)人的前臂是一个 (选填“省力”、“费力”或“等臂”)杠杆;
(2)正常人的心脏推动血液流动的功率约为1.5W,那么在3s内心脏做的功是 J,这些功可把一个0.5N的鸡蛋匀速举高 m.
下列有关简单机械的叙述正确的是( )
A . 剪纸用的剪刀是一种省力杠杆
B . 使用定滑轮可以省力
C . 使用动滑轮可以省功
D . 任何机械做功时机械效率不可能达到100%
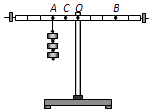
有一杠杆经过调节,处于水平平衡状态.如图所示,在A点悬挂三个钩码(每个钩码重均为0.5N),要使杠杆水平平衡,需在B点悬挂个钩码;取走悬挂在B点的钩码,改用弹簧测力计在C点竖直向拉,使杠杆水平平衡,则测力计的示数为N.
在探究“杠杆平衡条件”的实验中.
-
(1) 把杠杆的中点支在支架上,调节平衡螺母,使杠杆在位置平衡;
-
(2) 杠杆平衡后,在实验过程中(选填“能”或“不能”)再调节两侧的平衡螺母;
-
(3) 改变力和力臂的数值,做了三次实验,并将实验数据记录在下表中:
实验次数
动力F1/N
动力臂L1/cm
阻力F2/N
阻力臂L2/cm
1
0.5
20
1
10
2
1
15
1.5
10
3
2
15
1.5
20
通过分析表格中的数据,可得到杠杆的平衡条件是(用公式表示);
-
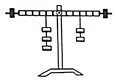
(4) 杠杆平衡后,如图所示,在两侧钩码下各增加一个相同的钩码,则杠杆的下沉(选填“左端”或“右端”).
地震救援中的科技“武器”
2015年台湾发生强烈地震,为了搜寻掩埋在废墟下的生命,使用了很多最新高科技设备进行救援.
生命探测仪:这是一种用于探测生命迹象的高科技援救设备,目前常用的有红外生命探测仪、音频生命探测仪和雷达生命探测仪.生命探测仪是基于穿墙生命探测(简称TWS)技术的发展应运而生的.TWS是研究障碍物后有无生命现象的一种探测技术,可采用无源探测和有源探测两种方法.无源探测主要是根据人体辐射能量与背景能量的差异,或者人体发出的声波或震动波等进行被动式探测,如红外生命探测仪、音频生命探测仪;有源探测则主动发射电磁波,根据人的呼吸、心跳等生理特点,从反射回来的电磁波中探测是否有生命存在,如雷达生命探测仪.
小气垫:用新型高强度材料制成,比枕头大不了多少.没充气时,将它塞进倒塌楼板间很小的缝隙中,然后充气使其内部压强达到8个大气压.用它可以顶起很重的楼板.
液压钳:可以不费力地咬断倒塌房屋中盘根错节的粗钢筋.
请依据上述内容回答下列问题:
-
(1) 红外生命探测仪能根据人体与周围建筑物不同,搜寻被废墟掩埋的生命.
-
(2) 雷达生命探测仪能主动发射电磁波,根据回来的电磁波探测是否存在生命.
-
(3) 若小气垫与楼板的接触面积为0.3m2 , 则用它可以顶起重为重的楼板(取大气压强p0=1×105Pa).
-
(4) 使用液压钳做的功液压钳咬断钢筋做的功(选填“大于”、“小于”或“等于”).
-
(5) 向小气垫里充气时,气垫内气体的密度.
-
(6) 液压钳属于杠杆.
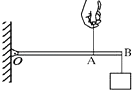
如图所示,轻质杠杆OB可绕O点转动,OA的长0.3米,AB的长0.1米,B点处挂一个重力为3牛的重物,A点处加一个竖直向上的力F,杠杆在水平位置平衡,则重物的质量大小为千克,力F大小为牛,这是杠杆(选填“省力”或“费力”),g=10N/kg.
请在图中画出均匀木棒OA所受力F的力臂l。

质地均匀杠杆,每个钩码重0.5N,下列操作中可以使杠杆在水平位置平衡的是( )(杠杆上有等间隔的刻度)
A . 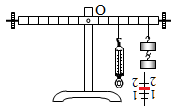 B .
B . 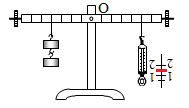 C .
C . 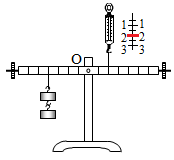 D .
D . 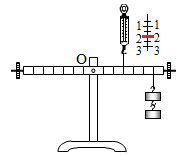
B .
C .
D .
如图所示的四种工具在正常使用过程中,属于费力杠杆的是( )
A .  天平
B .
天平
B .  筷子
C .
筷子
C .  撬棒
D .
撬棒
D .  羊角锤
羊角锤
天平
B . 筷子
C . 撬棒
D . 羊角锤
在庐江街道上,常看到一种剪树枝的-高枝剪,如图所示,它的基本构造主要包括剪口A、滑轮B、滑轮C和高强度纤维绳D组成的。电工师傅把高处要修剪的树枝放入剪口A处,然后用力F向下拉纤维绳D,就能把树枝剪断,高枝剪属于。剪口A制作的非常锋利目的是(选填“增大”或“减小”)压强;滑轮B为
(选填“定滑轮”或“动滑轮”)。

-
(1) 如图甲是中考时抛出实心球在空中运动时的情景,请画出实心球所受重力的示意图。
-
(2) 如图乙所示,请画出动力F1的力臂L1。
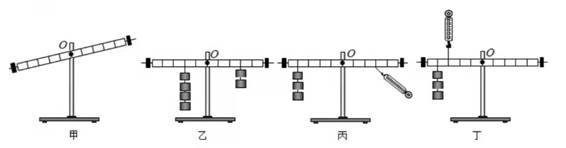
如图所示是洋洋和聪聪利用刻度均匀的轻质杠杆探究“杠杆平衡条件”的实验装置。
-
(1) 实验前没挂钩码时杠杆静止的位置如图甲所示,此时应将螺母向(选填“左”或“右”)调节,使杠杆在水平位置平衡。
-
(2) 杠杆平衡后,若洋洋在杠杆的左右两侧分别挂上钩码(每个钩码的质量相同),如图乙所示,则杠杆的(选填“左”或“右”)端将会下沉,要使杠杆重新在水平位置平衡,在不改变左右两侧钩码个数的前提下,只需将即可。
-
(3) 洋洋和聪聪又分别设计了两种实验方案,洋洋的方案如图丙所示,聪聪的方案如图丁所示,你认为的方案更好,请说明你的理由,图中弹簧测力计示数更大一些。
-
(4) 实验中洋洋发现:如果在杠杆的0点用弹簧测力计施加一个向上的力,这个力在探究实验时(选填“会”或“不会”)影响杠杆的平衡,请说明理由。
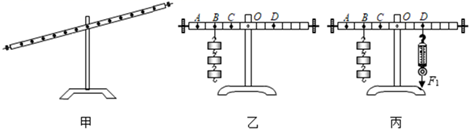
利用如图所示的装置来探究“杠杆的平衡条件”。
-
(1) 挂钩码前,杠杆在如图甲所示的位置静止,此时杠杆(填“达到”或“没有达到”)平衡状态,接下来应向(填“左”或“右”)调节杠杆两端的螺母,使杠杆保持水平并静止,这样做的目的是为了消除杠杆自重对实验的影响,且便于;
-
(2) 杠杆平衡后,如图乙所示,在杠杆B点挂3个相同的钩码,可在杠杆的D点挂个相同的钩码,就可使杠杆重新在水平位置平衡,如果在B、D两处的钩码各去掉一个,杠杆将(填“仍然平衡”或者“左端下沉”或者“右端下沉”);
-
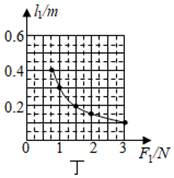
(3) 保持B点钩码数量和力臂不变,杠杆在水平位置平衡时,测出多组动力臂L1和动力F1的数据,绘制了L1-F1的关系图象,如图丁所示。请根据图象推算,当L1为0.6m时,F1为N;
-
(4) 小红用弹簧测力计在D点处竖直向下使杠杆在水平位置平衡,如图丙所示,但小红同学面对甲图状况,没有调水平平衡就匆忙进行了实验,则杠杆虽然此时水平平衡,但可以判断:FB•OBF1•OD(选填“大于、“小于”或“等于”,F1是弹簧测力计的示数)。
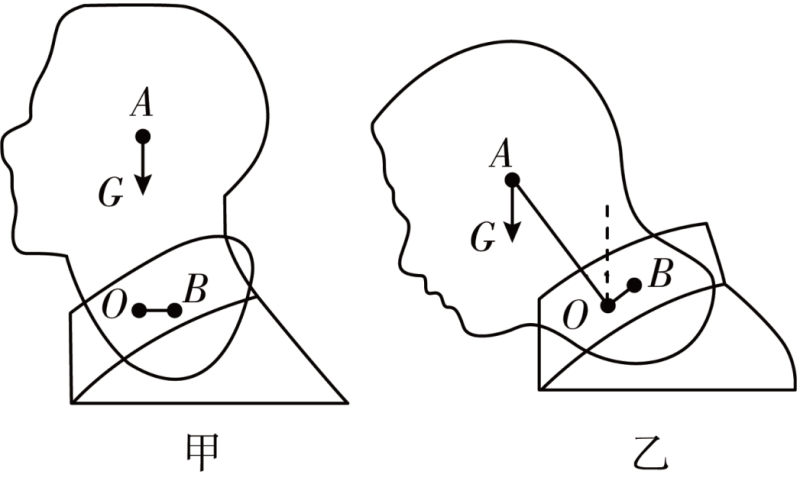
“低头族”长时间低头看手机,会引起颈部肌肉损伤。当头颅为竖直状态时,颈部肌肉的拉力为零,如图甲所示。当头颅低下时,颈部肌肉会产生一定的拉力,如图乙所示。人的头颅绕着支点O转动,A点为头颅的重心,B点为肌肉拉力作用点。请在图乙中画出肌肉的最小拉力F和头颅重力力臂L的示意图。
如图为匀速打开垃圾桶盖时的简化图;若动力作用在 点上,请在图中画出桶盖重力
点上,请在图中画出桶盖重力 的力臂
的力臂 和作用在点的最小动力
和作用在点的最小动力 的示意图。
的示意图。
点上,请在图中画出桶盖重力的力臂和作用在点的最小动力的示意图。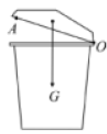
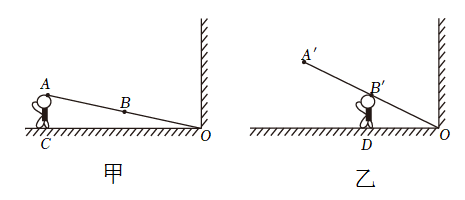
如图甲,粗细均匀的木棒AO放置在水平地面上,小明用100N竖直向上的力将木棒A端举过头顶,此时木棒A端距地面的高度为2m,已知OA=10m,B为木棒的中点,木棒在O点受到的摩擦阻力忽略不计。求;
-
(1) 木棒的重力;
-
(2) 如图乙,小明缓慢向O点移动,直至将木棒的中点B位置举过头顶。此过程中克服木棒重力做的功。
请根据所学知识分析:
-
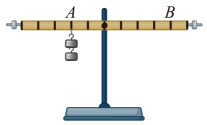
(1) 在“探究杠杆的平衡条件”实验中,如图所示,在A位置上挂两个相同钩码,应该在B位置挂上个同样的钩码,才能使杠杆在水平位置平衡。使用杠杆能为我们的生活带来方便。如图所示,下列杠杆能够省距离的是;
A.
 钳子
钳子B.
 独轮车
独轮车C.
 羊角锤
羊角锤D.
 筷子
筷子 -
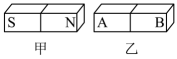
(2) 一木块静止在表面粗糙的木质水平桌面上,它所受重力与是一对平衡力。将木块换成条形磁铁甲,如图所示,条形磁铁乙向左运动,逐渐靠近条形磁铁甲,A、N为同名磁极,若甲始终静止,甲所受摩擦力方向向(选填“左”或“右”);
-
(3) 机场的水平电梯,电梯带着小海以相同速度匀速前进,此时小海(选填“有”或“没有”)受到电梯施加的摩擦力;电梯忽然停止工作,行李箱由于向前滑行,小海迅速用向下的力按着行李箱使之停下,这是通过方法来增加摩擦力。
如图是一些日常生活中所用的机械或工具,其中属于省力杠杆的是( )
A .  B .
B . 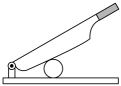 C .
C .  D .
D . 
B .
C .
D .
最近更新
- 中国的绘画艺术注重含蓄,讲究诗意美。宋徽宗赵佶有一次以“深山藏古寺”为题考画家。有的画师画了深山古寺的全景,有的画师画了
- 21.《元史》记载:元朝的行省“凡钱粮、兵甲、屯种、漕运、军国重事,无不领之”。在元代以前中国主要以“山川形便”来划分行
- 以下对组成细胞和生物体的有机物的描述中,正确的是 ( ) A.多肽链在核糖体上一旦合成
- 下列地理现象按其因果关系排列,正确的是() A.工业联系→工业地域→工业集聚→工业城市 B.工业集聚→工业地域→工业
- Na2CO3水溶液中存在CO2-3+H2OHCO-3+OH-平衡。下列说法不正确的是( ) A.稀释溶液,增大
- .命题“存在,为假命题”是命题“”的( ) A.充要条件 B.必要不
- 促使一战迅速结束的主要原因是( ) A.俄国发生“二月革命”和“十月革命”退出帝国主义战争 B.美国参加对德作战
- 已知函数,且,那么等于( ) A 10 B.-10 C.-18 D.-26
- (07年湖南卷理)函数在区间上的最小值是 .
- 重铬酸钾是工业生产和实验室的重要氧化剂,工业上常用铬铁矿(主要成分为FeO·Cr2O3,杂质为SiO2、Al2O3)为原
- 截至2010年3月29日,国务院已经正式批准25个城市建设地铁。按照规划,2010至2015年地铁建设投资额将达11 5
- (本题满分16分) 设函数. (Ⅰ) 判断在区间上的增减性并证明之; (Ⅱ) 若不等式≤≤对恒成立, 求实数的取值范围M
- 关于振动和波的关系下列叙述中正确的是 ( )A.有机械振动,就一定能形成机械波B.有机械波
- 在完全显性的条件下,AaBbCc与aaBbcc的个体杂交(符合独立分配规律),其子代表现型不同于双亲的个体占子代的(
- 下列卤代烃既属于芳香族卤代烃,又属于二卤代烃的是( )
- 3.依次填入下面一段文字横线处的语句,衔接最恰当的一组是(3分) 物的崇拜从来是与富贵、炫耀和时尚密切关联的。_____
- 下列各句中,加点的成语使用恰当的一项是(3分) ( ) A.12月2日,湖南茶业博览会在省展览馆举行。这次博览会
- 下列化学用语表达正确的是( ) A. 3个钠离子-- B. 2个氧原子--O2 C.
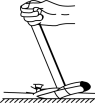
- 图中画出手对扳手的动力F的力臂,井用字母L表示.
- TODAY, Friday, November 12JAZZ with the Mike Thomas Jazz Ban



