第2节 平动和转动 知识点题库
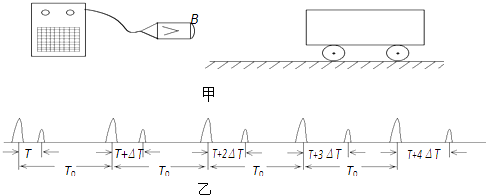
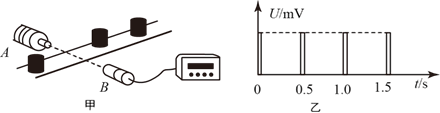
利用超声波遇到物体发生反射,可测定物体运动的有关参量.如图 (甲)中仪器A和B通过电缆线连接,B为超声波发射与接收一体化装置,仪器A为B提供超声波信号源而且能将B接收到的超声波信号进行处理并在屏幕上显示其波形.现固定装置B,并将它对准匀速行驶的小车C,使其每隔固定时间T0发射一短脉冲如图(乙)中幅度大的波形,而B接收到的由小车C反射回的超声波经仪器A处理后显示如图(乙)中幅度较小的波形.反射滞后的时间已在图(乙)中标出.其中T0、T和△T为已知量,另外还知道该测定条件下声波在空气中的速度为v0 .
-
(1) 根据所给信息可判断小车的运动方向;
-
(2) 求小车的速度大小.
公路巡警开车在高速公路上以100km/h的恒定速度巡查,在同一车道上巡警车向前方的一辆轿车发出一个已知频率的电磁波,如果该电磁波被那辆轿车反射回来时,巡警车接收到的电磁波的频率比发出时低,说明那辆轿车的车速( )
A . 高于100 km/h
B . 低于100 km/h
C . 等于100 km/h
D . 无法确定
根据所学知识填空:
-
(1) 如图是自行车传动机构的示意图,其中 I是大齿轮,II是小齿轮,III是后轮,半径之比为2:1:5,且后轮直径为60cm.则:
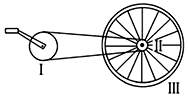
I、II两轮边缘上点的线速度v之比:;
II、III两轮边缘上点的角速度ω之比:;
II、III两轮边缘上点的线速度v之比:.
-
(2) 若再测得脚踏板的转速为75r/min,结合以上各量计算自行车的时速约为多少(保留两位有效数字): km/h.
两个质量相同的小球a、b用长度不等的细线拴在天花板上的同一点并在空中同一水平面内做匀速圆周运动,如图所示,则a、b两小球具有相同的( )
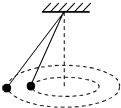
A . 角速度
B . 线速度
C . 向心力
D . 向心加速度
关于地球上的物体,由于地球自转,物体的角速度、线速度大小,以下说法正确的是( )
A . 在赤道上的物体线速度最大
B . 在两极上的物体线速度最大
C . 在赤道上的物体角速度最大
D . 北京和南京的角速度大小相等
如图所示,一个球绕中心轴线OO′以角速度ω做匀速圆周运动,则( )
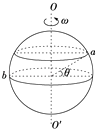
A . a、b两点线速度相同
B . a、b两点角速度相同
C . 若θ=30°,则a、b两点的线速度之比va:vb=  :2
D . 若θ=30°,则a、b两点的向心加速度之比ana:anb= :2
:2
D . 若θ=30°,则a、b两点的向心加速度之比ana:anb= :2
:2
D . 若θ=30°,则a、b两点的向心加速度之比ana:anb= :2
如图所示,轻杆长为3L,在杆的A、B两端分别固定质量均为m的球A和球B,杆上距球A为L处的点O装在光滑水平转动轴上,杆和球在竖直面内转动,已知球A运动到最高点时,球A的速度刚好为  .求:
.求:
.求: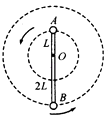
-
(1) 杆此时对球作用力大小和方向;
-
(2) 杆此时对水平轴O的作用力大小和方向.
请阅读下列材料,回答第(1)~(4)小题
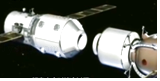
“神舟十一号”载人飞船,于 2016年10月19日3时31分,与“天宫二号”空间实验室成功实现自动交会对接,为我国未来空间站建设进行科学的技术验证,为实现我国从航天大国走向航天强国的中国梦典定了坚实的基础.
-
(1) “天宫二号”围绕地球做圆周运动,是由于受到万有引力作用,我国罗俊院士团队的引力实验室因其算出世界最精确的万有引力常数而被外国专家称为世界“引力中心”,关于万有引力定律的公式,下列正确的是( )A . F=kx B . F=G
 C . F=ma
D . F=k
C . F=ma
D . F=k 
-
(2) 分析下列物体的运动时,可将物体看作质点的是( )A . 研究航天员生活工作时的“天宫二号”太空仓 B . 对航天员姿势和动作进行分析时的航天员 C . 研究“天宫二号”和“神舟十一号”实现交会对接时的“神舟十一号”飞船 D . 计算围绕地球做圆周运动的轨道半径时的“神舟十一号”飞船
-
(3) 假设“天宫二号”与“神州十一号”都围绕地球做匀速圆周运动,用A代表“神舟十一号”,B代表“天宫二号”,它们对接前做圆周运动的情形如图所示,则下列说法中正确的是( )
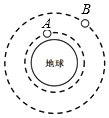 A . A的运行速度小于B的运行速度 B . A的运行速度大于B的运行速度 C . A的向心加速度小于B的向心加速度 D . A的向心加速度等于B的向心加速度
A . A的运行速度小于B的运行速度 B . A的运行速度大于B的运行速度 C . A的向心加速度小于B的向心加速度 D . A的向心加速度等于B的向心加速度 -
(4) 关于在轨运行的“天宫二号”,下列说法中正确的是( )A . “天宫二号”的运行速度一定大于7.9km/s B . “天宫二号”的运行速度一定大于7.9km/s且小于11.2km/s C . “天宫二号”运行时,其处于失重状态 D . “天宫二号”运行时,其处于平衡状态
身高h=1.7m的人以v=1m/s的速度沿平直路面远离路灯而去,在某时刻人的影长L1=1.3m,2s后的影长L2=1.8m.
-
(1) 求路灯s悬吊的高度H;
-
(2) 人是远离路灯而去的,他的影子的顶端是匀速运动还是加速运动?
-
(3) 在影长L1=1.3m和L2=1.8m时,影子顶端的速度各是多大?
某同学根据车轮通过两段铁轨交接处所发出的响声来估算火车的速度.他从车轮发出的某一次响声开始计时,并同时数1,当他数到21次时,表上显示的时间是15s.已知每段铁轨长12.5 m。根据这些数据,是否可以估算出火车的速度?(结果保留到小数点后一位)
物体做匀速圆周运动的过程中,以下物理量发生变化的是( )
A . 线速度
B . 周期
C . 频率
D . 向心力的大小
一物体作匀速圆周运动,在其运动过程中,不发生变化的物理量是( )
A . 线速度
B . 向心加速度
C . 合外力
D . 角速度
图中所示为一皮带传动装置,右轮的半径为  ,
,  是它边缘上的一点。左侧是一轮轴,大轮的半径为
是它边缘上的一点。左侧是一轮轴,大轮的半径为  ,小轮的半径为
,小轮的半径为  ,
,  点和
点和  点分别位于小轮和大轮的边缘上,若在传动过程中,皮带不打滑。则
点分别位于小轮和大轮的边缘上,若在传动过程中,皮带不打滑。则  三点线速度之比
三点线速度之比  , 三点角速度之比
, 三点角速度之比  。
。
, 是它边缘上的一点。左侧是一轮轴,大轮的半径为 ,小轮的半径为 , 点和 点分别位于小轮和大轮的边缘上,若在传动过程中,皮带不打滑。则 三点线速度之比 , 三点角速度之比 。 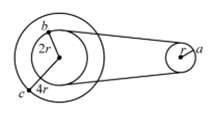
为了监控车辆是否超速,交通部门常用测速仪来检测。测速原理如图所示,测速仪前后两次发出并接收超声波信号,再根据两次信号的时间差,测出被测车辆的速度。如果某次检测车速时,第一次从发出至收到超声波信号用了0.3,第二次从发出至收到超声波信号用了0.6s,两次信号发出的时间间隔是2s,则测得汽车的速度为( )(假设超声波的速度为340m/s,且保持不变)

A . 23.7m/s
B . 25.5m/s
C . 51.0m/s
D . 75.0m/s
利用光敏电阻制作的光传感器,可以记录传递带上工件的输送情况。如图甲所示为某工厂成品包装车间的光传感记录器,光传感器B能接收到发光元件A发出的光,每当工件挡住A发出的光时,光传感器就输出一个电信号,并在屏幕上显示出电信号与时间的关系,如图乙所示。若传送带始终匀速运动,每两个工件间的距离为0.1m,则下述说法正确的是( )
A . 传送带运动的速度是0.1 m/s
B . 传送带运动的速度是0.2 m/s
C . 该传送带每小时输送3600个工件
D . 该传送带每小时输送7200个工件
如图所示,一小球用长为l的细线悬于P点,并在水平面内做角速度为ω的匀速圆周运动,轨迹圆的圆心O到P点的距离为h。下列说法正确的是( )
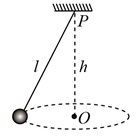
A . 保持h不变,增大l,ω不变
B . 保持h不变,增大l,ω变大
C . 保持l不变,增大ω,h不变
D . 保持l不变,增大ω,h变大
用如图所示的实验装置来探究小球做圆周运动所需向心力的大小F与质量m、角速度  和半径r之间的关系,转动手柄使长槽和短槽分别随变速塔轮匀速转动,槽内的球就做匀速圆周运动。横臂的挡板对球的压力提供了向心力,球对挡板的反作用力通过横臂的杠杆作用使弹簧测力套筒下降,从而露出标尺,标尺上的红白相间的等分格显示出两个小球所受向心力的比值。实验用球分为钢球和铝球,请回答相关问题:
和半径r之间的关系,转动手柄使长槽和短槽分别随变速塔轮匀速转动,槽内的球就做匀速圆周运动。横臂的挡板对球的压力提供了向心力,球对挡板的反作用力通过横臂的杠杆作用使弹簧测力套筒下降,从而露出标尺,标尺上的红白相间的等分格显示出两个小球所受向心力的比值。实验用球分为钢球和铝球,请回答相关问题:
和半径r之间的关系,转动手柄使长槽和短槽分别随变速塔轮匀速转动,槽内的球就做匀速圆周运动。横臂的挡板对球的压力提供了向心力,球对挡板的反作用力通过横臂的杠杆作用使弹簧测力套筒下降,从而露出标尺,标尺上的红白相间的等分格显示出两个小球所受向心力的比值。实验用球分为钢球和铝球,请回答相关问题: 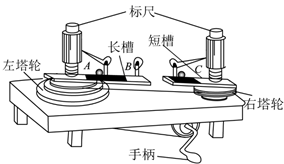
-
(1) 在研究向心力的大小F与质量m、角速度 和半径r之间的关系时,我们主要用到了物理学中的___________。
A . 理想实验法 B . 等效替代法 C . 控制变量法 D . 演绎法
-
(2) 在某次实验中,某同学把两个质量相等的钢球放在A、C位置,A、C到塔轮中心距离相同,将皮带处于左右塔轮的半径不等的层上。转动手柄,观察左右标出的刻度,此时可研究向心力的大小与___________的关系。A . 质量m B . 角速度
C . 半径r
-
(3) 在(2)的实验中,某同学匀速转动手柄时,左边标尺露出4个格,右边标尺露出1个格,则皮带连接的左、右塔轮半径之比为;其他条件不变若增大手柄转动的速度,则左右两标尺的示数将,两标尺示数的比值(选填:变大、变小或不变)
某儿童公园摩天轮高达88米,拥有48个座舱,能够同时容纳288人,旋转一周需要20分钟。一质量为m的乘客坐在该摩天轮中以速率v在竖直平面内做匀速圆周运动,下列说法正确的是( )

A . 该乘客的速率v约为13m/s
B . 乘客的向心加速度约为0.001m/s2
C . 在运动过程中,乘客的机械能守恒
D . 若增大转动速率,该乘客对座位的最大压力跟最小压力的差值不变
滚筒洗衣机里衣物随着滚筒做高速匀速圆周运动,以达到脱水的效果。滚筒截面如图所示,下列说法正确的是( )
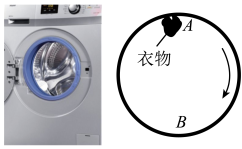
A . 衣物运动到最低点B点时处于超重状态
B . 衣物和水都做离心运动
C . 衣物运动到最高点A点时脱水效果更好
D . 衣物运动到最低点B点时脱水效果更好
如图所示,门上有A、B两点,在关门的过程中,A、B两点的角速度、线速度大小关系是( )
A . ωA>ωB
B . ωA<ωB
C . vA>vB
D . vA<vB
最近更新
- 下列不属于植物体内蛋白质功能的是( ) A.构成细胞膜的主要成分 B.催化细胞内化
- 砹(At)是原子序数最大的卤族元素,对砹及其化合物的叙述,正确的是() A.与H2化合的能力:At2>I2
- 现有六种物品:金属小刀片、塑料直尺、2B铅笔、食盐水、眼镜片、橡皮,小明将它们分成两类,如下表所示。他是按照物质的哪种属
- 下列条约中既有割地内容又有赔款内容的是 A.《天津条约》 B.《北京条约》 C.《马
- 下列变化中属于化学变化的是()A. 酒精挥发 B. 甲烷燃烧 C. 矿石粉碎 D. 冰雪融化
- 下列有关线粒体和叶绿体的叙述,错误的是( ) A. 线粒体和叶绿体携带的遗传信息可以表达出来 B. 线粒体和叶绿
- 1984年3月,来自福建全省各地国有骨干企业的55位厂长经理联合发表了一封呼吁信——《给我们松绑》,要求扩大企业自主权,
- 公民行使监督权,实行民主监督,可以利用多种方法和渠道。如 ①信访举报制度 ②人大代表联系群众制度 ③专家咨询制度
- 双曲线(,)的左、右焦点分别是,过作倾斜角为的直线交双曲线右支于点,若垂直于轴,则双曲线的离心率为( )A.
- 温家宝总理在两会后的记者招待会上表示:“亦余心之所善兮,虽九死其犹未悔。我将以此明志,做好今后三年的工作。”温总理的话告
- 已知实系数一元二次方程,下列结论正确的是( ) ①是这个方程有实根的充分条件;②是这个方程有实根的必要条件③是这个方程有
- 用惰性电极电解饱和Na2CO3溶液,若保持温度不变,则一段时间后( )。A.溶液的pH变大B.c(Na+)与c
- 对铀235的进一步研究在核能的开发和利用中具有重要意义。如图所示,质量为m、电荷量为q的铀235离子,从容器A下方的小孔
- 下列离子方程式正确的是A.将少量SO2气体通入NaClO溶液中:SO2+H2O+ClO-+Cl-+2H+B.澄清石灰水与
- 第三部分阅读理解(共20小题;每小题2分,满分40分) 请认真阅读下列短文,从短文后各题所给的A、B、C、D四个
- 下列说法不正确的是( ) A.1mol固态物质或液态物质的体积主要决定于构成这种物质的粒子的大小 B.
- 在Rt△ABC中,∠C=90°,AC=3, BC=4,则AB=___________;
- 如图是某生态系统食物网简图请据图回答问题:(1)图中草属于__________,各种动物属于__________ (2)
- 下列物质属于单质的是() A. 氧化铁 B. 氢气 C. 稀硫酸 D. 硫酸铜
- 已知关于的函数同时满足下列三个条件: ①函数的图象不经过第二象限; ②当时,对应的函数值; ③当时,函数值y随x的



