第2节 平动和转动 知识点题库
如图,叠放在水平转台上的物体A,B,C能随转台一起以角速度ω匀速转动,A,B,C的质量分别为3m、2m、m,A与B,B和C与转台间的动摩擦因数都为μ,A和B,C离转台中心的距离分别为r、1.5r.设本题中的最大静摩擦力等于滑动摩擦力,下列说法正确的是( )
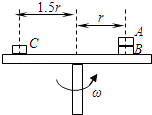
A . B对A的摩擦力一定为3μmg
B . B对A的摩擦力一定为3mω2r
C . 转台的角速度一定满足:ω≤  D . 转台的角速度一定满足:ω≤
D . 转台的角速度一定满足:ω≤ 
D . 转台的角速度一定满足:ω≤
如图所示,内壁光滑的半球形碗固定不动,其轴线垂直于水平面,两个质量相同的小球A和B紧贴着内壁分别在如图所示的水平面内做匀速圆周运动,则( )
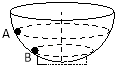
A . 球A的角速度小于球B的角速度
B . 球A的线速度等小于球B的线速度
C . 球A对碗壁的压力等于球B对碗壁的压力
D . 球A的向心加速度大于球B的向心加速度
如图所示,两个啮合的齿轮,其中小齿轮半径为10cm,大齿轮半径为20cm,大齿轮中C点离圆心O2的距离为10cm,A、B两点分别为两个齿轮边缘上的点,则A、B、C三点的( )
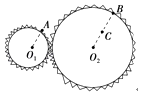
A . 线速度之比是1:1:1
B . 角速度之比是1:1:1
C . 向心加速度之比是4:2:1
D . 转动周期之比是1:2:2
一辆汽车向悬崖匀速驶近时鸣喇叭,经t1=8s后听到来自悬崖的回声;再前进t2=27s,第二次鸣喇叭,经t3=6s又听到回声.已知声音在空气中的传播速度v0=340m/s.则汽车第一次鸣喇叭时与悬崖的距离为;汽车行驶的速度为.
电磁波遇到某些障碍物会发生反射现象,雷达就是根据这一原理制成的.一次,某雷达站正在观察一架飞机飞行,若飞机正向雷达站飞来,从某时刻雷达发出的电磁波到接收到反射的电磁波历时200微秒,隔4秒种后再观测,从发出电磁波到接收到反射的电磁波历时186微秒,则飞机飞行的速度为.
如图所示为两个用摩擦传动的轮子,A为主动轮,已知A、B轮的半径比为R1:R2=1:2,C点离圆心的距离为  ,轮子A和B通过摩擦的传动不打滑,则在两轮子做匀速圆周运动的过程中,以下关于两轮缘上A、B点及C点的线速度大小V、角速度大小ω、转速n之间关系的判断中正确的是( )
,轮子A和B通过摩擦的传动不打滑,则在两轮子做匀速圆周运动的过程中,以下关于两轮缘上A、B点及C点的线速度大小V、角速度大小ω、转速n之间关系的判断中正确的是( )
,轮子A和B通过摩擦的传动不打滑,则在两轮子做匀速圆周运动的过程中,以下关于两轮缘上A、B点及C点的线速度大小V、角速度大小ω、转速n之间关系的判断中正确的是( )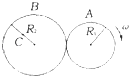
A . VA=2VB
B . ωA=ωC
C . ωA=2ωB
D . nB=2nA
根据《日经新闻》的报道,日本将在2020年东京奥运会开幕之前使“无人驾驶”汽车正式上路并且投入运营.高度详细的3D地图技术能够为“无人驾驶”汽车提供大量可靠的数据,这些数据可以通过汽车内部的机器学习系统进行全面的分析,以执行不同的指令.如图所示为一段公路拐弯处的3D地图,你认为以下说法正确的是( )
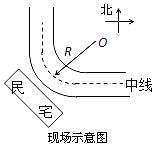
A . 如果弯道是水平的,则“无人驾驶”汽车在拐弯时受到重力、支持力、摩擦力和向心力
B . 如果弯道是水平的,则“无人驾驶”汽车在拐弯时收到的指令应让车速小一点,防止汽车作离心运动而发生侧翻
C . 如果弯道是倾斜的,3D地图上应标出内(东)高外(西)低
D . 如果弯道是倾斜的,3D地图上应标出外(西)高内(东)低
如图为“行星传动示意图”,中心“太阳轮”的转动轴固定,其半径为 R1 , 周围四个“行星轮”的转动轴固定,其半径均为 R2 , “齿圈”的半径为 R3 , 其中R1=1.5R2 , A、B、C 分别是“太阳轮”、“行星轮”和“齿圈”边缘上的点,齿轮传动过程不打滑,则 A 点与C 点的线速度之比为,
B 点与 C
点的周期之比为。

物体做匀速圆周运动时,下列物理量中变化的是( )
A . 线速度
B . 角速度
C . 向心加速度
D . 动能
如图所示,两个正、负点电荷,在库仑力作用下,它们以两者连线上的某点O为圆心做匀速圆周运动,以下说法正确的是( )
![]()
A . 它们所需要的向心力大小相等
B . 它们做圆周运动的角速度相等
C . 它们的运动半径与其质量成正比
D . 它们的线速度与其质量成反比
离心式甩干机的工作原理是:电动机带动甩干桶旋转,如图。利用离心运动,将衣物中的水从筒壁的小孔甩出去。假设甩干筒始终保持匀速转动,有一件已经脱水后的衣物附在筒壁上,跟着筒一起同步转动,下列说法正确的是( )
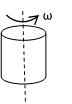
A . 衣物做圆周运动的向心力是摩擦力
B . 如果该筒的转速更大,筒壁对衣物的弹力也更大
C . 如果该筒的转速更大,筒壁对衣物的摩擦力也会更大
D . 筒壁对衣物的摩擦力大小与衣物受到的弹力大小成正比
如图所示的皮带传动装置中, a、b、c分别为轮边缘上的三点。已知Ra:Rb:Rc=1:2:3。假设在传动过程中皮带不打滑,则在传动过程中,b、c 的角速度之比为( )
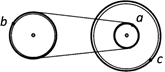
A . 3:1
B . 1:3
C . 2:1
D . 1:2
质量为m的木块从半球形的碗口下滑到碗底的过程中,如果由于摩擦力的作用,使得木块的速率不变,那么( )
A . 下滑过程中木块的加速度为零
B . 下滑过程中木块所受合力大小不变
C . 下滑过程中木块所受合力为零
D . 下滑过程中木块所受的合力越来越大
在中国南昌有世界第五高摩天轮一南昌之星,总建设高度为  ,直径为
,直径为  。它共悬挂有60个太空舱,旋转一周的时间是
。它共悬挂有60个太空舱,旋转一周的时间是  ,可容纳400人左右游览。若该摩天轮做匀速圆周运动,则乘客( )
,可容纳400人左右游览。若该摩天轮做匀速圆周运动,则乘客( )
,直径为 。它共悬挂有60个太空舱,旋转一周的时间是 ,可容纳400人左右游览。若该摩天轮做匀速圆周运动,则乘客( ) 
A . 速度始终恒定
B . 加速度始终恒定
C . 对座椅的压力始终不变
D . 受到合力不断改变
小李乘坐16节车厢编组的高铁旅行。他位于某节车厢尾部且恰好进入隧道时,立即以正常速度向此车厢前部行走。他经过15s到达车厢头部时恰好出隧道。行走过程中看到车厢内显示屏上的示数为216km/h,则该列车通过隧道的时间最接近于( )
A . 10s
B . 15s
C . 21s
D . 30s
如图所示是一个玩具陀螺,a、b和c是陀螺表面上的三个点。当陀螺绕垂直于地面的轴线以角速度  稳定旋转时,下列表述正确的是( )
稳定旋转时,下列表述正确的是( )
稳定旋转时,下列表述正确的是( ) 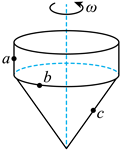
A . a、b和c三点的线速度大小相等
B . a、b和c三点的角速度大小不相等
C . a、b两点的角速度比c的大
D . a、b两点的加速度比c点的大
如图所示, 、B、C三个物体放在水平旋转圆台上,用细线连接并固定在转轴上。已知物体与圆台间的动摩擦因数均为
、B、C三个物体放在水平旋转圆台上,用细线连接并固定在转轴上。已知物体与圆台间的动摩擦因数均为 , 且最大静摩擦力等于滑动摩擦力;细线能承受的最大拉力为
, 且最大静摩擦力等于滑动摩擦力;细线能承受的最大拉力为 , 的质量为
, 的质量为 , B、C的质量均为
, B、C的质量均为 , 、B离轴的距离为
, 、B离轴的距离为 , C离轴的距离为
, C离轴的距离为 , 重力加速度取
, 重力加速度取 , 当慢慢增加圆台转速,最先滑动的是( )
, 当慢慢增加圆台转速,最先滑动的是( )
、B、C三个物体放在水平旋转圆台上,用细线连接并固定在转轴上。已知物体与圆台间的动摩擦因数均为 , 且最大静摩擦力等于滑动摩擦力;细线能承受的最大拉力为 , 的质量为 , B、C的质量均为 , 、B离轴的距离为 , C离轴的距离为 , 重力加速度取 , 当慢慢增加圆台转速,最先滑动的是( )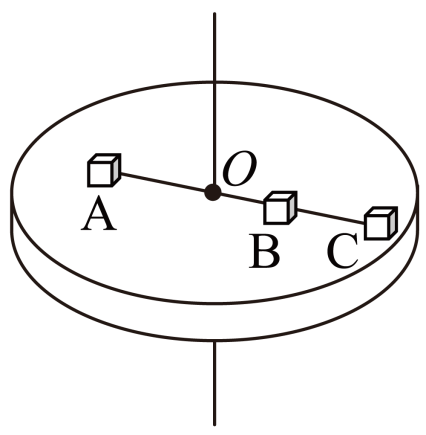
A . A
B . B
C . C
D . 三个物体同时滑动
如图所示,A、B、C三个物体放在旋转圆台上,都没有滑动。已知A的质量为2m,B、C的质量均为m;A、B离轴的距离为R,C离轴的距离为2R。三物体与圆台的动摩擦因数均为,最大静摩擦力等于滑动摩擦力,当圆台旋转时,下列判断中正确的是( )
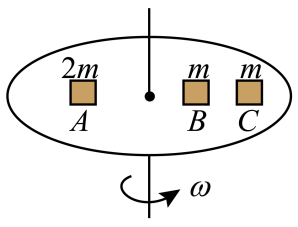
A . A的向心加速度最大
B . B的静摩擦力最小
C . 当圆台转速增加时,C比A先滑动
D . 当圆台转速增加时,B比A先滑动
如图是简化的某种旋转磁极式发电机原理图。定子是仅匝数n不同的两线圈,  ,二者轴线在同一平面内且相互垂直,两线圈到其轴线交点O的距离相等,且均连接阻值为R的电阻,转子是中心在O点的条形磁铁,绕O点在该平面内匀速转动时,两线圈输出正弦式交变电流。不计线圈电阻、自感及两线圈间的相互影响,下列说法正确的是( )
,二者轴线在同一平面内且相互垂直,两线圈到其轴线交点O的距离相等,且均连接阻值为R的电阻,转子是中心在O点的条形磁铁,绕O点在该平面内匀速转动时,两线圈输出正弦式交变电流。不计线圈电阻、自感及两线圈间的相互影响,下列说法正确的是( )
,二者轴线在同一平面内且相互垂直,两线圈到其轴线交点O的距离相等,且均连接阻值为R的电阻,转子是中心在O点的条形磁铁,绕O点在该平面内匀速转动时,两线圈输出正弦式交变电流。不计线圈电阻、自感及两线圈间的相互影响,下列说法正确的是( )
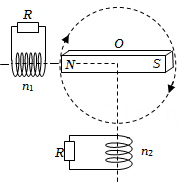
A . 两线圈产生的电动势的有效值相等
B . 两线圈产生的交变电流频率相等
C . 两线圈产生的电动势同时达到最大值
D . 两电阻消耗的电功率相等
有一种新式健身“神器”——能自动计数的智能呼啦圈深受健身爱好者的喜爱。如图甲所示,智能呼啦圈腰带外侧带有轨道,将带有滑轮的短杆穿入轨道,短杆的另一端悬挂一根带有配重的细绳,其简化模型如图乙所示。已知配重(可视为质点)质量 , 绳长为
, 绳长为 , 悬挂点到腰带中心的距离为
, 悬挂点到腰带中心的距离为 。水平固定好腰带,通过人体微小扭动,使配重做水平匀速圆周运动,计数器能显示在1min内转动圈数,在某一段时间内绳子始终与竖直方向夹角为
。水平固定好腰带,通过人体微小扭动,使配重做水平匀速圆周运动,计数器能显示在1min内转动圈数,在某一段时间内绳子始终与竖直方向夹角为 。配重运动过程中腰带可看作不动,重力加速度取
。配重运动过程中腰带可看作不动,重力加速度取 ,
,  ,
,  , 下列说法正确的是( )
, 下列说法正确的是( )
, 绳长为 , 悬挂点到腰带中心的距离为。水平固定好腰带,通过人体微小扭动,使配重做水平匀速圆周运动,计数器能显示在1min内转动圈数,在某一段时间内绳子始终与竖直方向夹角为。配重运动过程中腰带可看作不动,重力加速度取 , , , 下列说法正确的是( )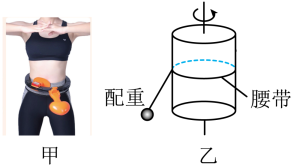
A . 匀速转动时,配重受到的合力为零
B . 若增大转速,腰受到腰带的弹力不变
C . 若 配重的角速度是120
配重的角速度是120 D . 若
D . 若 则配重的角速度为
则配重的角速度为
配重的角速度是120
D . 若则配重的角速度为
最近更新
- 据清代叶梦珠《阅世编》载,晚明上海“棉布盛行,富商巨贾操重资而来市者,白银动以数万两,多或数十万两,少亦以万计,以故牙行
- 关于细菌结构的有关叙述中,正确的是( ) A. 细菌体内没有任何细胞器和染色体 B.细菌都含有质粒 C.细菌的细胞
- 对下列有机反应类型的认识中,错误的是 A. :取代反应 B.CH2=CH2+Br2 →CH2BrCH2Br:
- 今年秋天,山东曲阜的一家葡萄种植专业户,由于种植面积大、产量高,而销路窄,致使大量的葡萄堆积腐烂。其相邻的一家养猪专业户
- 某电视台邀请几位专家就一些产业部门的垄断问题进行讨论。请根据专家的回答推断并概括主持人的提问语(不超过15个字)。
- Left at home alone,he felt afraid andcouldn't ________ hims
- 下列各句中,没有错别字的一项是 A.《英国文学史纲》绪言部分将英国文学分为四个时期:草创期、意大利文化影响期、法兰西文化
- ―What do you think we can do for our aged parents?―You
- 已知函数(为常数,且)的图象过点. (Ⅰ)求实数、的值; (Ⅱ)若函数,试判断函数的奇偶性,并说明理由.
- 在一箱未成熟的香蕉中,放入几个成熟的菠萝,结果香蕉很快就成熟了,其中发挥作用的激素是( ) A.生长素 B.
- 阅读下面的文字,按要求作文: 洪战辉被评为“感动中国年度人物”后,有一段真情告白,他说:“不是我感动了中国人,而
- 如图所示的电路中,R1、R2均为定值电阻,电源电压不变,闭合开关 S1、S2,两电表均有示数;再断开开关S2,关于电压表
- 在2014年的第四届群众性精神文明创建活动中,中央要求把深入推进未成年人思想道德建设作为重点工作来抓。国家重视思想道德建
- 清政府对义和团的策略演变过程是 A.剿灭——招抚
- 正硼酸(H3BO3)是一种片层状结构白色晶体,层内的H3BO3分子通过氢键相连(如图).下列有关说法正确的是() A.
- 下面是某植物叶肉细胞中光合作用和呼吸作用的物质变化示意图,其中①~⑤为生理过程,a~h为物质名称,请回答: (1)图中物
- 德意志谚语说:“城市的空气使人自由。”意思是:( )A.当时的城市无工业污染,空气清新而自由B.在城市里没有法律约束,
- 如下图,C、D是线段AB上的两点,E是AC的中点,F是BD的中点,若EF=,CD=,则AB=( )A.
- --Why didn’t you tell Ann the truth? -- ______ . A. Yes, I w
- 学了这篇课文,你怎样理解骆驼寻到的宝?你有何感想?写出来,和同学交流一下。 答:



