高中通用技术:
高中 通用技术
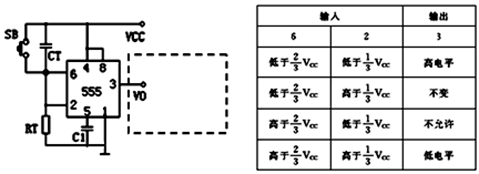
如图所示的电路要实现按下按键SB后灯亮,并且松开按键SB后延时自动关闭的功能,虚线框中应接入的电路,最合理的是( )
A . 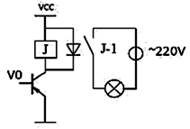 B .
B . 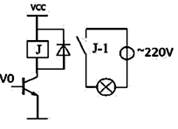 C .
C . 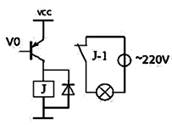 D .
D . 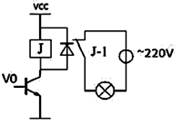
B .
C .
D .
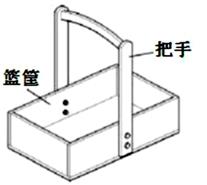
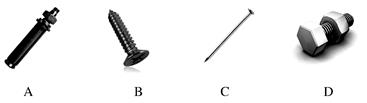
如图所示为一个提篮,其把手与篮筐之间采用螺栓螺母连接。通过改变篮筐的连接形状,实现拎起提篮不晃动,放下可翻倒把手(无需将螺栓螺母从把手中拧出)的功能。以下篮筐连接部位修改方案不合理的是( )
A . 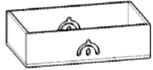 B .
B . 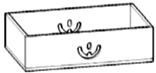 C .
C . 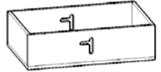 D .
D . 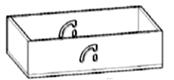
B .
C .
D .
如图所示为一款弹弓,操作者只需拉动弹弓,就可以把“子弹”发射出去,弹弓及橡皮筋的受力形变形式为( )

A . 弹弓受拉、橡皮筋受拉
B . 弹弓受压、橡皮筋受压
C . 弹弓受弯曲、橡皮筋受拉
D . 弹弓受弯曲、橡皮筋受压
某兴趣小组设计制作一款木质便携学习桌,其制作流程为:A .收集材料并下料(30分钟);B .桌面的制作(20分钟);C .支撑架的制作(10分钟);D .桌腿的制作(15分钟);E .组装(10分钟);F .表面处理(25分钟)。请你对此流程进行优化,并按要求完成下列各题:
-
(1) 画出合理的用时最短的方框流程图并算出时间。(用各环节前的代码表示)
-
(2) 写出该流程优化的目的和意义。
-
(3) 用系统分析的原则对你的流程优化进行分析。
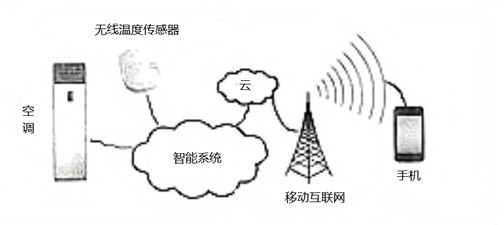
随着科学技术的发展,智能家居进入了普通的家庭。图中所示为其中的温度控制系统示意图,在寒冷的冬天,当我们准备回家时。通过手机打开空调并设置所需温度,让我们一进门就能感受到家的温暖。它的主要特点是:实现对室内温度的远程控制。试分析:
-
(1) 针对其主要特点,它要解决的主要问题是:通过对网络通信、自动控制等技术的综合运用,将家居生活有关的设施集成,构建高效的室内温度控制系统,提升家居的安全性、便利性、舒适性,并实现环保节能的居住环境。这体现了技术的性,这遵循设计的原则。
-
(2) 它解决问题的技术方法是:利用手机、电脑等终端设备和网络通信技术,通过智能系统实现对空调的远程操作。 从而实现对室内温度的控制,构成了控制系统(选填“开环”或者“闭环”) 。其中, 控制器,执行器是。
-
(3) 它的1个优点是。
-
(4) 说出它的1个缺点,并针对你发现的缺点,提出改进意见。
以下设计中不是考虑人机关系中的“安全”这一因素的是( )
A . 榔头与人接触部分不允许有尖角
B . 楼梯装有护栏
C . 笔杆的握笔处设计成弧形
D . 浴室的地面装防滑砖
如图所示为拖把柄,请你设计一个壁挂式连接结构,挂拖把柄。设计要求如下:
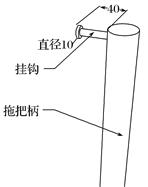
A.连接结构能可靠地安装在水泥墙壁上,具有足够的连接强度;
B.连接结构安装在水泥墙壁后,高度可连续调节;
C.挂钩能可靠地挂在连接结构上,挂、取拖把方便;
D.主要材料采用3 mm厚的钢板,辅助材料自选。
请根据描述和设计要求完成以下任务:
-
(1) ①画出连接结构的设计草图,必要时可用文字说明;
②在设计草图上标注连接结构的主要尺寸(最少两处);
-
(2) 连接结构安装到水泥墙壁上,合理的连接方式是(在下列选项中选择合适的选项,将序号填入横线处);
-
(3) 连接结构安装到水泥墙壁后,以下试验中不需要做的是(在①把挂钩挂在连接结构上再取下来,检测挂、取拖把是否方便;②检测连接结构与墙壁之间连接是否牢固;③检测挂钩与拖把柄之间连接是否牢固;④检测挂钩的强度中选择一项,将序号填入横线内)。
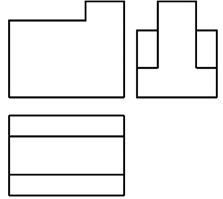
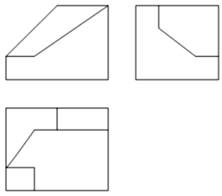
请补全三视图中所缺的三条线(超过三条图线倒扣分)
疫苗在正式投入临床使用之前,一般要先在小白鼠等动物体内进行活体试验,这种试验方法属于模拟试验法。
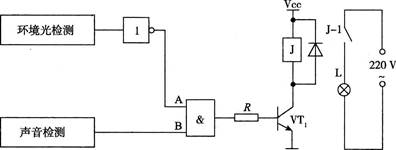
如图所示为声光控路灯电路原理图,只有当晚上光线暗且有声音时,路灯L亮,其他情况路灯均不亮。根据该电路原理图,回答小题。
-
(1) 下列图中可以作为环境光检测输入部分的是( )A .
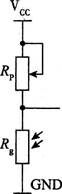 B .
B . 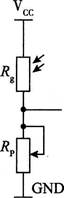 C .
C . 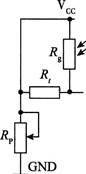 D .
D . 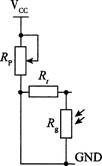
-
(2) 对该电路分析错误的是 ( )A . 如果电阻R阻值过大,可能会导致继电器无法吸合 B . 当白天光线强时,三极管VT1处于截止状态 C . 如果J一1换成常闭触点,晚上光线暗且有声音时灯不亮,其他情况均亮 D . 如将门电路与门换成或门,白天光线强且有声音时灯亮,其他情况均不亮
某品牌对生产出来的扫地机器人进行测试,发现此款扫地机器人,对角落的清洁达不到基本要求。此问题的发现属于( )

A . 观察日常生活
B . 技术研究和技术试验
C . 收集信息
D . 询问法
在下列操作过程中,主要受力形式为既受压又受扭转的工具是( )
A . 冲眼的样冲 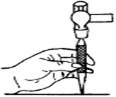 B . 锉削的锉刀
B . 锉削的锉刀 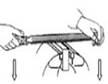 C . 钻孔的麻花钻
C . 钻孔的麻花钻  D . 拧螺帽的扳手
D . 拧螺帽的扳手 
B . 锉削的锉刀
C . 钻孔的麻花钻
D . 拧螺帽的扳手
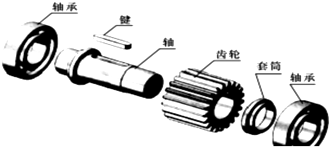
如图所示是齿轮轴的结构装配示意图。键安装在轴的键槽中,齿轮键槽对准键套到轴上,套筒安装在轴上并顶住齿轮端面,轴承安装在轴的两端起支承作用。该部件需要以下四个装配环节:①安装轴承;②安装齿轮;③安装套筒;④将键装入轴的键槽中。请根据上述描述,回答以下问题:
-
(1) 齿轮轴的装配流程为 → →_→ (将装配环节的序号填写在横线处);
-
(2) 加一段矩形钢手工加工图中的键,需要用到的设备和工具是:、、 (在①手锯;②板牙;③锉刀;④划规;⑤丝锥;⑥台虎钳;中选择三种,将序号填写在横线处);
-
(3) 为了提高齿轮表面的强度,可以采用的工艺是 (在①电镀;②淬火;③回火中选择一项,将序号填写在横线处)。
如图所示内燃机工作原理示意图,当燃烧室气体膨胀时,活塞被向右推,当燃烧室气体压缩时,活塞被向左拉。整个过程中,力通过杆件1和杆件2的传递,最终使杆件3带动轴A转动。以下状态时,关于内燃机各组件分析正确的是( )
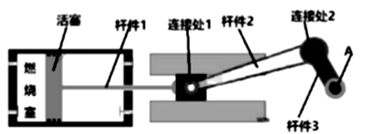
A . 当燃烧室燃料气体膨胀时,杆1受拉,轴A受剪切
B . 当燃烧室燃料气体压缩时,杆1受拉,杆3受拉
C . 当燃烧室燃料气体膨胀时,杆2受剪切,轴A受扭转
D . 当燃烧室燃料气体压缩时,杆2受拉,杆3受弯曲
在结构设计中也经常利用不稳定性,下列如图所示的设计没利用结构不稳定性的是( )
A .  会议厅坐椅的自转翻转椅面
B .
会议厅坐椅的自转翻转椅面
B .  不倒翁
C .
不倒翁
C .  地震仪
D .
地震仪
D .  折叠式栅栏
折叠式栅栏
会议厅坐椅的自转翻转椅面
B . 不倒翁
C . 地震仪
D . 折叠式栅栏
图示是将一元器件焊接至印刷电路板的过程,其中左右箭头所示的角度应为( )
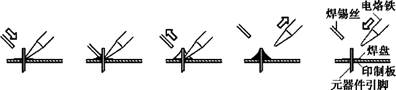
A . 15度
B . 30度
C . 45度
D . 60度
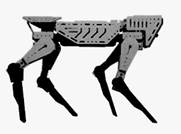
如图所示是一款四足机器人,它的自平衡系统工作原理是:当机器人受到外力作用时,由惯性测量单元IMU模块测量出机器人当前的状态,经内置CPU进行分析计算,驱动电动机运转,电动机带动四足机器人的关节运动,使机器人的状态作相应调整,从而维持机器人的平衡状态。请根据示意图及其描述,完成下面小题。
-
(1) 下列关于该系统的说法中,不恰当的是( )A . IMU模块的精度是该系统优化的影响因素 B . 该机器人具有良好的移动性和平衡性,体现了系统的目的性 C . 使用一段时间后,该机器人的充电性能下降,体现了系统的动态性 D . 该机器人经CPU分析计算后驱动电动机运转,体现了系统分析的科学性原则
-
(2) 关于该机器人平衡控制系统,以下说法中不恰当的是( )A . 该系统为闭环控制系统 B . 控制量为电动机的转动量 C . 被控对象为四足机器人 D . IMU模块只检测输入量
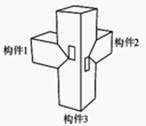
如图所示的连接结构中,构件1和构件2结构相同,下列选项中关于构件1的结构合理的是( )
A . 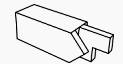 B .
B . 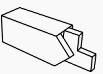 C .
C . 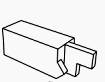 D .
D . 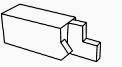
B .
C .
D .
如图所示是一辆折叠式自行车,它折叠后可以放在背包里,重量只有5公斤左右。你认为这项设计侧重于技术设计还是艺术设计?它的侧重点主要体现的哪些方面?

请补全三视图中所缺的3条图线。
最近更新
- you like swimming, fishing boating, you’ll have fun in the w
- 2010年5月12日,卡梅伦接替布朗出任英国首相职位并组阁。英国内阁的权力有 ①制度内外政策
- 物理学在研究实际问题时,常常进行科学抽象,即抓住研究问题的主要特征,不考虑与当前研究问题无关或影响较小的因素,建立理想化
- 世界上现存最早的标有确切年代的雕版印刷品是 A.《唐本草》 B.《千金方》 C.《金刚经》
- 下列化学方程式正确的是() A. B.S+O2SO2 C.4Fe+3O22Fe2O3 D.4P+5O22P2O5
- 关于对下图信息解读正确的是 A.2013年中央财政实现盈余 B.财政具有促进国民经济平稳运行的作用C.这是政府组织经济
- 阅读《“情绪污染也是病》,完成第24—26题。(共8分)
- 煤气添加少量有特殊臭味的乙硫醇(C2H5SH),可提醒人们预防煤气泄露。乙硫醇在煤气燃烧过程中也可充分燃烧,其反应方程式
- 我国古代中央机构不断变革,曾先后出现了三公九卿、三省六部、内阁、军机处等制度。这些变革反映的趋势是不断强化: A、专制皇
- 一个标有“4V 2W”字样的灯泡,给它两端加2V电压时,不考虑温度对它电阻的影响,则()A. 此时灯泡的实际功率为0.
- 下列有关细胞结构的叙述,正确的是A.叶绿体和细胞壁都只存于植物细胞中 B.液泡和线粒体都是由双层膜包围的细胞器 C.溶酶
- .四人赛跑,其跑过的路程f(x)和时间x的关系分别是:f1(x)=,f2(x)=x,f3(x)=log2(x+1),f4
- 下列计算正确的是 【 】 A. B. C. D.
- 2009年1月西藏自治区九届人大二次会议通过决议,把每年3月28日定为“西藏百万农奴解放纪念日”。此举有利于A.进一步增
- 若函数y=f(x)是函数y=ax(a>0,且a≠1)的反函数,且f(2)=1,则f(x)=() A.log2x
- Can you imagine the singer _____ so much in public? A. being
- 关于原子的组成,下列说法正确的是 ( ) A.原
- 下述实验设计或操作正确的是( )选项 实验目的 实验设计 A 除去铝箔上少量的氧化膜 将铝箔放入 NaOH 溶液中洗涤
- 村庄的语言 许锋 (1)很多人一生都在做一件事,离开村庄。这话似乎有些偏颇,但若是把“村庄”改成“城市”,这话就有些失去
- “蒸汽时代”和“电气时代”的来临都 ①推动了社会生产力的大幅度提高 ②促使新的工业部门兴起 ③使世界各地的联系日益密



