高中通用技术:
高中 通用技术
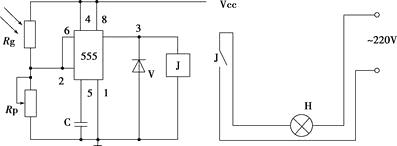
如图所示是一个用555集成制作的路灯自动控制电路。工作原理:当外界有光照较亮时,Rg阻值很小,555集成输入脚2、6脚高电平,使3脚输出脚为低电平,继电器不动作,常开触点断开,路灯H不亮。当外界光线较暗时,Rg阻值很大,555集成输入脚2、6脚低电平,使3脚输出脚为高电平,继电器吸合,常开触点闭合,路灯H亮。
根据材料回答问题:
-
(1) 当外界光线逐渐变亮时,555输入脚2、6脚的电压如何变化( )A . 逐渐升高 B . 逐渐降低 C . 不变 D . 等于0
-
(2) 当外界光线较暗时,路灯H还没有亮,应如何调试( )A . 升高电源Vcc电压 B . 路灯灯泡功率换小 C . 可调电阻Rp调小 D . 可调电阻Rp调大
-
(3) 不管外界的光线如何变化,路灯H一直不亮,以下最不可能的原因是( )A . 可调电阻Rp两端的其中一端跟电路没接上 B . 光敏电阻Rg两端的其中一端跟电路没接上 C . 继电器线圈的一端跟555集成的3脚没接上 D . 555集成4、8脚没跟电源正极连接
立柱式的广告牌容易被台风吹倒,是因为( )
A . 造得不牢
B . 受力面积大
C . 支撑面积小
D . 受力面积大而支撑面积小
如图所示是一款新型血糖控制仪,它能够很好地模拟正常人胰腺分泌胰岛素的动态调节功能,皮下探针实时检测出人体血糖并反馈给血糖控制仪,若超过正常血糖范围,血糖控制仪控制胰岛素泵的胰岛素供给速度,直到把人体实时血糖值维持在正常指标范围内。

-
(1) 从系统角度分析,下列说法不正确的是( )A . 该血糖控制仪能够实时监测调节血糖,体现系统的目的性 B . 探针的灵敏度是影响系统优化的因素 C . 胰岛素泵的可靠工作是系统作用的关键,体现了系统的整体性
 D . 通过血糖控制仪能将人体实时血糖值维持在正常指标范围内,体现系统的动态性
D . 通过血糖控制仪能将人体实时血糖值维持在正常指标范围内,体现系统的动态性
-
(2) 从控制角度分析,下列说法正确的是( )A . 输入量是人体血糖值 B . 进餐后血糖升高是系统的干扰因素 C . 被控对象是胰岛素泵 D . 该系统是开环控制系统
我国古代中医经过长期的实践,总结出了一套比较科学的诊断工作流程:望诊→闻诊→问诊→切诊→处方。但是现在,中医的诊断也借助西医的物理检验手段来加强中医的诊断准确。这样的流程优化属于( )
A . 工期优化
B . 技术优化
C . 成本优化
D . 质量优化
如图所示,若SW1和SW2任何一个拨到3,则红灯不亮,该芯片含有( )
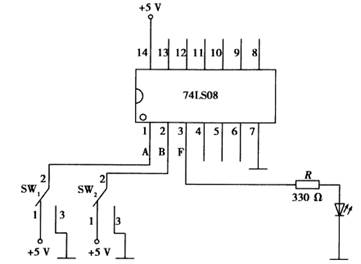
A . 与门
B . 非门
C . 与非门
D . 或非门
小明计划利用家里装修时留下的木质边角料,在通用技术实践室中制作一个如图所示平 板电脑的支架。下列不属于解决该问题的限制因素的是( )

A . 购买辅助材料的资金
B . 现有的工具
C . 平板电脑的尺寸
D . 小明的科学实验能力
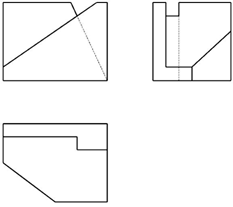
如图所示是一款铝合金金属架,现要求使用5mm厚的钢板设计一个中间连接件(只需要画出一侧),能把置物架安装到墙壁上。连接件设计要求如下:

A. 置物架能牢固安装在水泥墙壁上;
B.置物架不用时能向下翻转悬挂,上翻能水平放置;
C.置物架能方便、快捷地上翻和下放
根据上述描述完成下列各小题:
-
(1) ①画出连接件的设计草图,可用必要的文字说明;
②在设计草图上标注主要尺寸;
-
(2) 该连接件与墙壁之间应采用连接(在以下选项中,选择合适的一项,将序号填写在横线处);
①膨胀螺栓
 ②胶头螺丝
②胶头螺丝  ③普通螺栓
③普通螺栓  ④元宝螺丝
④元宝螺丝 
如图所示为一款综合闪存移动电池的产品,不仅可以存储文件,还可以为你的手机应急充电;另外,接入电脑存储文件时可同时对其电池蓄电。下列关于该技术的说法中正确的是( )

A . 综合闪存及移动电池的功能,体现技术的综合性
B . 具有存储文件及应急充电功能,体现技术的目的性
C . 存储文件的同时对电池蓄电,体现技术的两面性
D . 可接入电脑储存文件,体现技术的创新性
下列有关流程的说法中,不正确的是( )
A . 任何一项生产或生活活动都有一定的时序
B . 串行工序改成并行工序减少了单位时间内投入的成本
C . 流程的设计需要考虑材料、工艺、设备、人员、资金和环境等因素
D . 某些生产流程中的产物和原料不属于环节
请补全三视图中所缺的三条图线
如图所示的小区垃圾桶的缺点是桶盖打开不方便不卫生。从设计的一般过程分析,如果要解决上述问题,首先要做的是( )

A . 收集有关垃圾桶的信息
B . 绘制垃圾桶的三视图
C . 提出重新设计一个垃圾桶,并明确其设计要求
D . 提出解决桶盖打开不方便和不卫生的多个设想
在一些大客车座椅,或者老板椅的靠背上部,都有一道鼓起来的凸包。从设计上来说,这道凸包本来是用来垫靠颈部的凹处,使人的头颈更舒服的。问题的出现是由于这些座椅的设计和生产直接从国外引进,而生产者又没有有关的常识,尺寸上完全照搬,由于中国人的身材较西方人小,结果西人垫颈的凸包就顶住了我们的后脑勺。这个案例主要说明生产者没有处理好人机关系中的:( )

A . 普通人群与特殊人群的关系
B . 静态的人与动态的人的关系
C . 人的心理和生理需求的关系
D . 信息的交互
小明想把如图所示的木板安装到墙上作为小书桌使用,要求木板使用时能水平放置,不用时收起,现提出下列结构方案,其中不合理的是( )
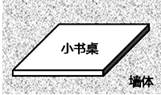
A .  B .
B .  C .
C . 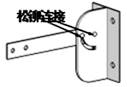 D .
D . 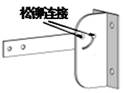
B .
C .
D .
“流程优化设计到多个优化指标。我们在优化某一流程时,只要选择其中的一个指标优化,达到该指标的优化就可以了。”这种说法是否正确,并说明理由。
如图所示为一款家用防漏油瓶,使用时灵活方便,倒油后油嘴不滴油,不挂油。下列关于该产品的设计分析和评价中不正确的是( )

A . 瓶身设计刻度尺,可控制油的用量,符合设计的实用原则
B . 瓶塞中换气孔的设计主要是为了防止瓶中油变质
C . 油嘴防尘开关采用食用塑料设计,主要考虑了人的因素
D . 不沾油玻璃瓶身设计,主要考虑了环境因素
如果将某人通过电话叫对方干某事的过程,看成是一个控制,那么线路中的噪声及通话环境的嘈杂声,可以称作是控制环节中的( )。
A . 给定值
B . 被控对象
C . 被控量
D . 干扰
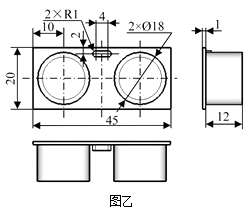
如图所示为小陶同学设计的智能小车,超声波传感器需要通过支架固定在车身上,并保持探头水平向前的状态(如图甲所示),请你帮助他继续完成设计,在虚框位置设计一款超声波传感器支架,超声波传感器的尺寸规格如图乙所示,制作支架的材料为厚度2mm的铝板,其他配件自选。设计要求如下:
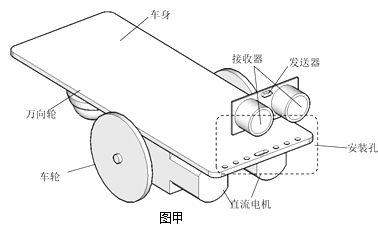
A.超声波传感器与支架的连接牢固可靠,车子变速时不易掉落;
B.支架与车身之间采用直径为2mm的螺栓螺母连接,车身的宽度为70mm,并预留安装孔;
C.支架不能遮挡住超声波传感器前方的发送器与接收器;
D.超声波传感器与车身之间的距离为20mm。
-
(1) 画出支架的设计草图(小车及超声波传感器可以不画),必要时可用文字说明;
-
(2) 在设计草图上标注支架的主要尺寸;
-
(3) 考虑到小车行驶时,超声波传感器的振动会给小车的控制带来干扰,以下措施合理的是(在①在螺栓螺母中间放置平垫圈;②在螺栓螺母中间放置橡胶垫圈;③在螺母外侧再拧上一颗螺母中选择一项,将序号填写在横线处);
电风扇在设计过程中,需要进行多项试验,其中包括稳定性试验。针对以下四种稳定性试验措施,其中不需要的是( )
A . 调到最高位置,最高风速
B . 调到仰角最大时,最高风速
C . 最高风速,摇头状态
D . 最高风速,水平方向零距离正对阻风墙
在我国,家用电器使用的交流电一般额定电压是220V,频率是50HZ,这体现家用电器的设计符合了技术的( )
A . 实用性原则
B . 科学性原则
C . 技术规范原则
D . 可持续发展原则
系统的优化是在一定的条件下,使系统达到更理想、更佳效果的过程。请判断以下事例,不能使系统达到优化的是( )
A . 青藏铁路的修建
B . 利用农作物生长的季节差、时间差进行间作套种
C . 为了提高玉米的产量,提高玉米的种植密度
D . 为减缓城市交通压力实行单日单号、双日双号车辆准行制
最近更新
- 清末一首名为《报馆》的竹枝词写道:“是非曲直报中分,一纸风行四海闻。振聋发聩权 力大,万般提创总有君。”对该词的恰当解读
- 已知1—18号元素的离子aW3+、bX+、cY2-、dZ-都具有相同的电子层结构,下列关系正确的是( ) A.质子
- 下列关于人体的免疫的说法正确的有A.免疫系统包括免疫器官和免疫细胞两部分 B.T细胞是在胸腺中成熟的,而B细胞是在骨髓中
- (1)化学用语是学习和研究化学的工具,请用化学用语填空: ①氮气;②亚铁离子;③标出氮气中氮元素的化合价. (2)在O2
- 检验集气瓶内氧气是否收集满,最好的方法是A.将带火星的木条伸至集气瓶中 B.将带火星的木条放到集气瓶口C.将燃着的木条伸
- 阅读下面的文字,完成1—4题。 秋日里对春风的怀念 ——代序兼记李文珍先生 冯骥才 ①我已经第二次接到旅美画家王
- Onceupon a time there was a girl who, though of humble or
- p{font-size:10.5pt;line-height:150%;margin:0;padding:0;}td{f
- 已知A物质是一种气态烷烃,标况下取22.4L该烃完全燃烧消耗氧气的质量是160g,A的一氯代物有两种同分异构体分别为B和
- --Can youcome to my party? ---_________. A,Sure ,I’d love
- 在三角形纸片ABC中,∠A=90°,∠C=30°,AC=30cm,将该纸片沿过点B的直线折叠,使点A落在斜边BC上的一点
- (21)某蔬菜基地种植西红柿,由历年市场行情得知,从二月一日起的300天内,西红柿场售价与上市时间的关系用图一的一条折线
- 下列运输方式中,有“从门口到门口”的优势的是( ) A. 公路 B. 管道 C. 水路 D. 铁路
- 二次函数的图象如何移动就得到的图象 ( )A.向右移动1个单位,向上移动4个单位B.向左移动1个单位,向上
- 已知椭圆+=1(a>b>0)的左、右焦点分别为F1,F2,|F1F2|=2,点P为椭圆短轴的端点,且△PF1
- 11.对下列加横线词语文言词类活用判断,正确的一项是( ) ①伯杀人臣活之 ②籍吏民,封府库 ③使使以闻大王 ④謇朝
- 右图是著名漫画家钱病鹤先生于1909年创作的题为《各国联合龙灯大会》的漫画。对其表达的寓意表述正确的是 A. 反映了当时
- 22.Lawrence Craven, a doctor from the USA,is the author of s
- 在成人的乳腺细胞中比腹肌细胞数量显著多的细胞器是() A.核糖体 B. 线粒体
- 北京是我们国家的政治中心,向世界展示着中华文化的悠久与灿烂。回答问题。1.保护世界文化遗产的说法,正确的是( )



