闭环控制系统的基本组成 知识点题库
随着生活水平的提高,我们的新房也开始安装智能新风控制系统,此系统能使我们在不开窗的情况下,也能改善房间的空气质量。智能新风控制系统的工作过程为,在设定智能新风系统在某个我们需要的状态后,传感器检测房间内二氧化碳和颗粒物的浓度值,并与刚刚开启的状态的值进行比较,之后再把信号传送至智能控制器,控制器在处理完信号后控制风机转动使进风口和出风口有流动的空气,最终使房间内的空气质量达到我们需要的值。请根据描述,完成下面两题。
-
(1) 从系统的角度分析,下列说法正确的是( )A . 该系统对颗粒物过滤效果在使用一段时间后会慢慢变差,这体现了系统的环境适应性差 B . 能根据检测到的二氧化碳和颗粒物浓度值来控制风机的运转,这体现了系统的动态性 C . 在传感器发生故障会使新风系统无法工作,这体现了系统的相关性 D . 新风控制系统由传感器、智能控制器、风机、出风口、进风口等组成,这体现了系统的整体性
-
(2) 关于该新风控制系统,以下说法正确的是( )A . 控制量为进风口和出风口空气的流动量 B . 该控制系统的被控对象为出风口和进风口 C . 该控制系统的输入量为传感器检测到的信号 D . 输出量为风机转动输出的流动的空气
普通抽水马桶的水箱水位控制装置。扳动放水手柄,水箱放水,与此同时,浮球下降,打开进水塞,水箱开始进水。当水位开始上升,浮球上浮到原设定位置时,水箱停止进水。下列有关该水箱水位控制系统的说法中不正确的是( )
A . 进水量是该系统的输入量
B . 出水量是该系统的主要干扰
C . 该系统的控制手段是液压控制
D . 往水箱中放入少量砖块,水箱水位的设定值将受影响
如图所示是一款防瞌睡帽。该帽子内置加速度计和陀螺仪,能感知驾驶员的头部动作,并利用智能算法较为准确地比较区分驾驶员瞌睡动作与检查仪表盘、看后视镜等驾车动作。一旦该帽子中的主控制器确认为驾驶员瞌睡中,会发出指令使电子开关闭合,从而发出声音、光线、震动等叫醒驾驶员。下列关于该控制系统的分析中正确的是( )

A . 执行器是电子开关
B . 被控对象是驾驶员
C . 控制量是声音、光线、震动等信号
D . 该系统含有检测装置和比较部分,所以属闭环控制系统
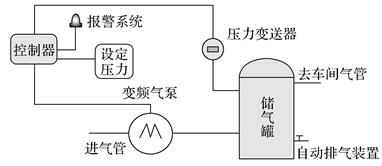
如图所示为某储气罐压力自动控制和自动报警系统示意图。压力变送器检测储气罐中的压力值,该值被送到控制器,与设定压力值进行比较,控制器根据偏差值控制变频气泵的转速,从而使储气罐的实际压力达到设定值。当压力值超出设定上限时,就发出报警信号,并自动排气。请完成下列各题,在有横线处填上相应的内容。
-
(1) 该系统除了压力自动控制子系统以外,还有子系统和自动排气装置。
-
(2) 根据示意图及其描述,补充完整压力自动控制系统方框图。
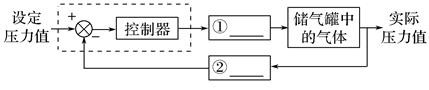
① ②
-
(3) 当压力自动控制系统出现故障,导致储气罐内气体压力过高,在此情况下对储气罐有保护作用的是(在①去车间的送气管道;②自动排气装置中选择一项,填写序号)。
如图所示的空气压缩机,当储气罐内的压缩空气排放到一定程度时,压力开关自动接通电源,电机带动气泵运转,向储气罐补充压缩空气,使储气罐内的气压保持在设定范围内。下列关于该压缩机的气压控制系统的分析中,正确的是( )

A . 控制方式属于开环控制
B . 输入量是电能
C . 控制量是气泵输出的空气流量
D . 输出量是储气罐内的压缩空气
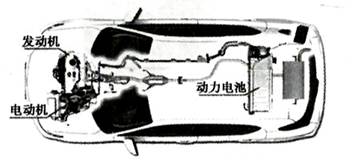
如图所示为某款混合动力汽车,具有动力好、排放低/起步平顺等优点。在怠速和低速行驶时,发动机停止运转,只靠电动机驱动,当传感器监测到车速达到发动机最佳工况时,行车电脑发送切换指令,择动离合器贴合到油动侧;当刹车降速后,又自动切回电动机驱动并停止给发动机供油,请根据示意图和描述,完成以下任务:
-
(1) 该动力切换系统的控制手段和控制方式分别属于和(在①手动控制;②自动控制;③开环控制;④闭环控制中选择合适的选项,将序号填写在横线处);
-
(2) 该动力切换系统的执行器是,控制器是(在①单片机;②择动离合器;③发动机;④汽车中选择合适的选项,将序号填写在横线处);
-
(3) 该系统中的传感器选用(在①流量传感器;②速度传感器;③阻力传感器中选择合适的选项,将序号填写在横线处)。
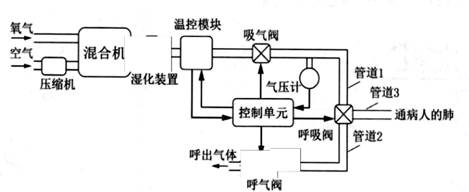
如图所示是某呼吸机系统的工作原理示意图。控制单元控制呼吸阀实现呼吸频率的调节。在吸气阶段,控制单元控制吸气阀的开合度将空气送入病人的肺内,肺内的压力增大使肺腔扩张,当肺内的压力达到预置值,关闭吸气阀,实现吸气功能。在呼气阶段,打开呼气阀,由于肺腔组织的弹性,将肺恢复到原来的形状,而使经过交换的一部分空气呼出体外,关闭呼气阀,实现呼气功能。请根据示意图及其描述完成问题。
-
(1) 从系统的角度分析,下列说法中不恰当的是( )A . 代替人的呼吸功能,体现了系统的目的性 B . 在吸气子系统中,吸气阀和呼吸阀由控制单元单独控制,它们之间没有关联 C . 经过一段时间的使用后,各个管道和阀门都需要消毒处理,体现了系统的动态性 D . 优化系统的吸气效果时,病人自身的肺功能属于约束条件
-
(2) 以下对吸气气压控制子系统的分析中,正确的是( )A . 吸气时,呼吸阀将管道2和管道3接通 B . 控制方式是开环控制 C . 控制量是流过吸气阀的空气流量 D . 气压计的灵敏度不影响控制精度
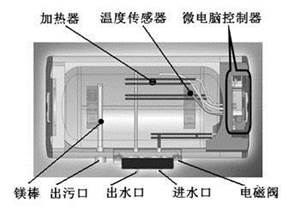
如图所示为樱花牌SHE-6079家用电热水器内部结构示意图,该电热水器水温控制系统的工作原理是:在控制面板上设定温度,当实际温度低于设定值时,微电脑控制器控制加热器加热,热水器的实际温度达到设定值时停止加热。请根据示意图及描述完成(1)(2)小题。
-
(1) 该水温控制系统的控制手段和控制方式属于( )A . 手动控制、开环控制 B . 自动控制、闭环控制 C . 自动控制、开环控制 D . 手动控制、闭环控制
-
(2) 关于该水温控制系统,以下说法中错误的是( )A . 输入量是水温设定值 B . 执行器是加热器 C . 被控对象是电磁阀 D . 进水状态时会产生干扰
如图所示的是一款有着向日葵外观的充电器,它使用集成的太阳能电池板,可以将吸收的太阳能转换为电能。集成太阳能电池板架在圆形底座上,底座集成了光传感器,通过电子芯片控制微型电机转动,从而带动电池板绕水平和垂直的旋转轴运动,实现光线追踪的功能,更好地收集太阳光,将太阳能转换为电能储存在内置电池中,并能给智能手机充电。
请根据以上控制过程描述,回答下列问题:

-
(1) 太阳能充电器的光线追踪控制系统属于(在①开环控制;②闭环控制中选择合适的选项,将序号填写在横线处)。
-
(2) 该光线追踪控制系统的执行器与被控对象分别是和(在①光传感器;②马达;③电子芯片;④电池板;⑤内置电池;⑥智能手机中选择合适的选项,将序号填写在横线处)。
-
(3) 太阳能充电器使用过程会受到各种干扰,太阳能电池板不能很好地迎着太阳光,以下因素中不属于干扰因素的是(在①室内灯光亮度;②微型电机的工作性能;③空气中的PM2.5浓度中选择合适的选项,将序号填写在横线处)。
-
(4) 太阳能充电器使用时间久了,光传感器上会有灰尘覆盖,造成光线追踪功能无法实现。针对这一问题,下列优化措施中不合理的是(在①充电器要经常人工清理灰尘;②提高光传感器的灵敏度;③在光传感器上面套一个用帆布制成的防尘罩中选择合适的选项,将序号填写在横线处)。
-
(5) 在设计该太阳能充电器时,既要考虑充电效率,又要考虑电池容量,还要考虑充电器的体积等方面。这体现了系统分析的(在①整体性;②科学性;③综合性中选择合适的选项,将序号填写在横线处)原则。
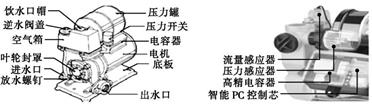
自吸增压水压控制系统如图所示,可以实现自来水、太阳能热水器等用水时水压不足情况下的增压功能。开启水龙头时,流量感应器检测水管中的流量,同时压力感应器检测水管中的水压,经智能PC控制芯片与设定值比较后决定电机是否工作。请完成下题。
-
(1) 从系统的角度分析,下列说法中正确的是( )A . 采用了降噪处理,降低工作时的噪音,体现了系统的动态性 B . 采用压力罐设计,具有防止使用过程中的频繁启停的作用,体现了系统的目的性 C . 自来水的供水水压是该控制系统的影响因素 D . 选择电容器时,既要考虑电机功率,又要考虑多种感应器等,体现了系统分析的综合性原则
-
(2) 下列对该水压控制系统的说法中正确的是( )A . 该系统为开环控制系统 B . 流量传感应器具有检测水龙头是否开启的作用 C . 被控对象为电机 D . 控制量为水管中的实际水压
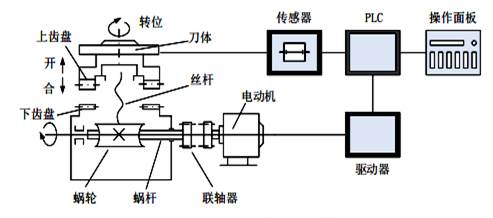
如图所示是数控车床电动刀架控制系统,工作人员通过操作面板输入刀体位置与控制程序,PLC控制模块根据控制信息与传感器检测到的刀体位置信号使驱动器发出相应的驱动信号驱动电机转动,从而带动蜗杆、蜗轮与丝杆运动,最终使刀体移动到设定位置。请根据示意图及其描述完成下面小题。
-
(1) 下列关于该控制系统的说法中不正确的是( )A . 该系统由蜗轮、蜗杆、丝杆等组成,体现了系统分析的综合性原则 B . 电动机根据程序转动,驱动蜗杆带动蜗轮与丝杆运动,体现了系统的相关性 C . 在工作温度过高时,该系统会自动停机,体现了系统的环境适应性 D . 蜗轮的磨损将影响刀体的控制精度
-
(2) 下列关于数控车床电动刀架控制系统的分析中正确是( )A . 控制量是刀体的实际位置 B . 控制器是电机 C . 被控对象是刀体 D . 该控制方式是开环控制
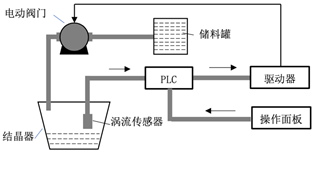
如图所示的结晶器钢水液面控制系统,PLC根据涡流传感器检测到的相应数据与设定值进行比较,通过驱动器控制电动阀门进而控制结晶器钢水液面高度。请根据示意图及描述完成下面小题。
-
(1) 从系统的角度,下列分析中不正确的是( )A . 涡流传感器的精度影响着钢水液面的控制精度,体现了系统的整体性 B . 电动阀门的性能是影响该系统优化的因素 C . PLC根据涡流传感器的电流大小分析计算出对应液面高度,体现系统分析的科学性原则 D . 钢水液面的控制精度是该系统的优化目标
-
(2) 下列关于结晶器钢水液面控制系统的分析中正确的是( )A . 输入量是钢水液面实际高度 B . 控制器是驱动器 C . 执行器是电动阀门 D . 控制量是PLC的输出信号
如图所示是无拖曳航天器控制系统,该系统主要由检查质量块悬浮控制环路、无拖曳控制器、微推进器和航天器平台等模块组成,其中检查质量块悬浮控制环路可以保持检验质量处于框架的中心位置,同时能高精度获取航天器平台和检验质量块之间的位置偏差,并传输给无拖曳控制器,微推进器产生推力,保证航天器平台以检验质量块为中心。该系统可以减小航天器受宇宙环境扰动的影响,确保超稳的实验环境。下列关于无拖曳航天器控制系统说法合理的是( )
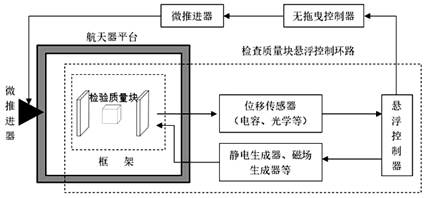
A . 被控对象是航天器平台,控制量是微推进器产生的推力大小
B . 该控制系统属于自动、开环控制
C . 由于该系统可以抵消太空环境对航天器平台的扰动力,所以太阳光压等宇宙环境因素不属于该系统的干扰因素
D . 研究检验质量块悬浮控制环路时,要逐个分析位移传感器、悬浮控制器等要素的功能,采用了黑箱方法
某游泳池水位控制系统的控制过程为:水位传感器检测游泳池的实际水位,并将信号返回到输入端与设定值进行比较,当实际水位低于设定水位时,控制器发出指令打开进水阀门;当实际水位达到设定值时,控制器发出指令关闭阀门。下列说法中不正确的是( )
A . 该控制方式是闭环控制
B . 设定水位发生变化是干扰因素
C . 被控对象是游泳池
D . 执行器是进水阀门
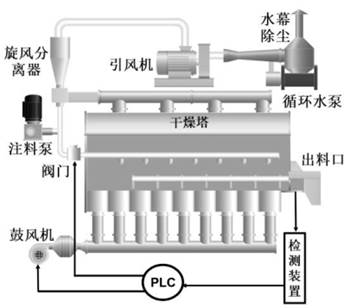
如图所示是药粉干燥分离控制系统示意图。工作时,注料泵向干燥塔注入湿料,PLC根据检测装置检测到的出料口药粉干燥程度,控制鼓风机风量以及注料阀门的开合程度,使药粉的干燥程度符合设定范围。同时,与物料接触过夹带药粉的空气,经过旋风分离器,使药粉沉降重新回流进入干燥塔,废气再经水幕除尘器洗涤后排放。请根据示意图及其描述完成下面小题。
-
(1) 关于该控制系统,下列说法中不恰当的是( )A . 具有药粉干燥功能,体现了系统的目的性 B . 鼓风机功率过小,导致药粉过湿,体现了系统的整体性 C . 废气经过水幕除尘器洗涤后排放,体现了系统的环境适应性 D . 系统运行一段时间后,旋风分离器性能降低,体现了系统的动态性
-
(2) 下列关于药粉干燥控制子系统的说法中正确的是( )A . 注料泵为执行器 B . 该系统属于开环控制系统 C . 注料阀门的开合程度为输入量 D . 注入湿料的含水量属于该系统的干扰因素
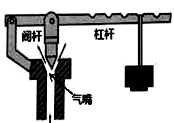
如图的工业锅炉,压力控制主要由气嘴、阀杆、杠杆、重锤等组成。当锅炉工作压力超过设定值时,气嘴被打开,蒸汽向外排放,锅炉内压力下降。请根据示意图和描述,完成以下任务:
-
(1) 该系统的控制手段和控制方式分别属于和(①手动控制;②自动控制;③开环控制;④闭环控制);
-
(2) 该系统中不可能是控制器的是(①杠杆;②重锤;③气嘴);
-
(3) 要增加锅炉内的压力,最合理的方法是(①加大火力;②重锤右移;③增加杠杆长度);
-
(4) 通过移动重锤位置调整锅炉压力设定值,体现了系统的(①环境适应性;②整体性;③相关性)。
-
(5) 锅炉的最大压力值是系统优化的(①目标函数;②约束条件;③影响因素)。
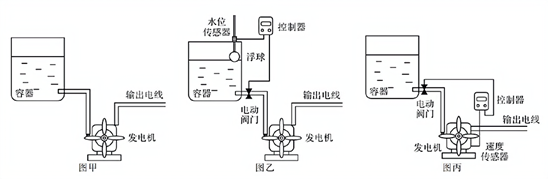
如图甲所示为小明设计的水力发电试验装置示意图,容器里的水通过水管喷到发电机的叶片上。带动发电机转动而发电。由于出水后水位下降,出水速度会渐渐变慢.发电机的发电功率也渐渐减小。为了克服这种情况的出现.小明设计了两个使发电功率稳定输出的方案(如图乙与图丙所示)。其中图乙是根据水位来调节电动阀门的开合度;图丙是通过检测发电机的转速来控制电动阀门的开合度。请根据示意图和描述.完成以下任务:
-
(1) 小明设计流速控制前,需要建立水位于流速之间的数学模型,从而实现流速控制这种在系统分析过程中建立数学模型的方法,符合系统分析的(在A .整体性;B .科学性;C .综合性中选择合理的选项,将序号填入横线处)
-
(2) 图乙与图丙的发电机转速控制方式分别属于 、 (在A .开环控制;B .闭环控制中选择合适的选项,将序号填入横线处)
-
(3) 图乙与图丙的传感器分别检测的控制系统是 、 (在A .输入量;B .输出量;C .控制量中选择合适的选项,将序号填入横线处)
-
(4) 图乙与图丙控制系统中的执行器为(A .均为电动阀门;B .电动阀门与发电机;C .均为发电机中选择合适选项,将序号填入横线处)
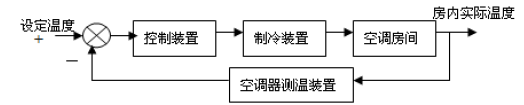
下图是房间温度控制系统的方框图,请回答下列问题。
-
(1) 这是一个环控制系统;本控制系统中的控制对象是。
-
(2) 本控制系统中的给定量和被控量各是什么?
-
(3) 在该控制系统工作时,打开空调房间的门窗,对控制系统起什么作用?
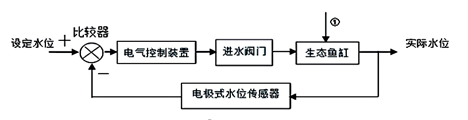
小明把自家的简易鱼缸通过摆景观石、铺底砂、种水草等环节后,改造成生态鱼缸;为鱼缸加装了加水装置,实现水位低于某高度时,系统自动加水.请按要求完成下面小题
-
(1) 下列描述不正确的是( )A . 生态鱼缸是—个系统,水草、鱼、水等为其要素且相互联系,相互作用 B . 小明拟订有效的改造方案,完美实现鱼缸生态形成,这是系统分析的结果 C . 鱼缸系统具有整体性、目的住、相关住、动态性、环境适应佳等基本特性 D . 鱼缸晚间照明系统有安全隐患,小明可主要考虑照明效果,暂时忽视安全
-
(2) 鱼缸水位控制中,水管注水到设定水位时,电极式水位传感器发回信号,控制装置开始控制关闭进水阀门后停止注水,下列判断正确的是( )A . 进水阀门是控制器 B . 水位传感器是执行器 C . 水管是被控对象 D . 水位传感器是检测装置
-
(3) 改造后的生态鱼缸水位控制属于( )A . 开环、自动控制 B . 闭环、自动控制 C . 开环、手动控制 D . 闭环、手动控制
-
(4) 生态鱼缸水位控制框图中①处所指的是( )A . 反馈 B . 系统 C . 控制 D . 干扰
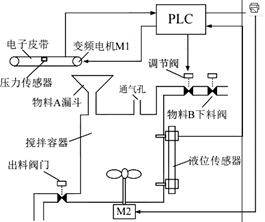
如图所示为物料自动混合控制系统示意图,其中物料A是一种粒度比较小的固体物料,当物料A下落到电子皮带上时,压力传感器将测得的数据传送到PLC与给定值进行比较。根据比较结果调节变频电机M1的转速,从而控制物料A的给料量。物料B为液体物料,液位传感器将检测到液位信号传送到PLC,由PLC控制调节阀的开度,从而控制物料B的给料量。搅拌电机M2能根据搅拌容器中液位的变化,实时调整转速。请根据示意图及描述完成小题。
-
(1) 关于该物料自动混合控制系统,下列分析中正确的是( )A . 压力传感器的精度影响着物料 A 的给料量,体现了系统的动态性 B . 变频电机 M1 的性能是系统优化的影响因素 C . 搅拌电机 M2 能根据搅拌器中液位变化,实时调整转速,体现了系统的环境适应性 D . 确定电机 M2 的功率时,需要考虑容器的大小和物料 A 与物料 B 的配比,体现了系统分析的综合性原则
-
(2) 下列关于物料B给料控制子系统的分析中不正确的是( )A . 反馈装置是液位传感器 B . 被控对象是搅拌容器 C . 执行器是调节阀 D . 输出量是调节阀的开度
最近更新
- 若干桶方便面摆放在桌子上,实物图片左边所给的是它的三视图,该图中上面左为主视图、右为左视图、下为俯视图,则一堆方便面共
- 氮的氧化物中氮元素与氧元素的质量比为7∶4,则该氧化物中氮元素的化合价为( ) A.+1
- 如图,在三棱锥S﹣ABC中,平面SAB⊥平面SBC,AB⊥BC,AS=AB,过A作AF⊥SB,垂足为F,点E,G分别是棱
- 巴黎和会和雅尔塔会议: ①大国强权政治色彩明显 ②都决定建立维护国际和平与安全的国际组织 ③重新确立了
- 读等高线图,回答1、2题。1.关于四个村庄所处地形区的名称正确的是( ) A.王村地处山谷 B.张村地处
- 城市人口迅速增加将会产生的现象有( ) A.就业机会增加 B.医疗卫生条件改善
- 关于的反应叙述,不正确的是() A.上述过程存在着能量的释放和贮存 B.所有生物体内ADP转变成ATP所需能量都来自呼吸
- 阅读下面的材料,按要求作文。 产品,有质量;学术,有质量;空气,有质量;言论,有质量……我们周边的一切都有质量。追求生活
- 2009年5月,航天飞机在完成对哈勃空间望远镜的维修任务后,在A点从圆形轨道Ⅰ进入椭圆轨道Ⅱ,B为轨道Ⅱ上的一点,如图所
- 某同学在“用单摆测定重力加速度” 的实验中进行了如下的操作:1.用游标上有10个小格的游标卡尺测量摆球直径如右图甲所示,
- 以下说法错误的是A.爱因斯坦提出光子说成功地解释了光电效应,说明光具有粒子性B.光的波长越大,光子能量越小C.以不同的惯
- 如图,一次函数y=kx+b(k,b为常数,k≠0)的图象与反比例函数y=﹣的图象交于A、B两点,且与x轴交于点C,与y轴
- Something ______ wrong with the car, andit ______ not start
- 发展低碳经济是应对气候变化的最终选择,全球经济增长模式要实现低碳转型,已经成为各国共识。然而在全球“气候列车”上,发展中
- 阅读下列材料: 材料一:“人是万物的尺度”
- 为测定空气里氧气的含量,甲、乙、三个同学用如图所示的装置分别进行了实验探究。 (1)甲同学:点燃红磷立即伸入瓶中并塞上瓶
- 已知电离平衡常数:H2CO3>HClO>HCO3-,氧化性:HClO>Cl2>Br2>Fe3+>I2。下列有关离子反应或
- 第题(分)酸是化学中重要的一类物质,人们对酸的认识是逐步加深的。 ⑴ 1887年,阿仑尼乌斯提出了电离理论,在水溶液中能
- 以直角坐标系的原点为极点,x轴正半轴为极轴,并在两种坐标系中取相同的长度单位,已知直线l的极坐标方程为,它与曲线C:(α
- 幼儿园的小朋友们打算选择一种形状、大小都相同的多边形塑胶板铺活动室的底面,为了保证铺地时即无缝隙又不重叠,请你告诉他们下



