传送带模型 知识点题库
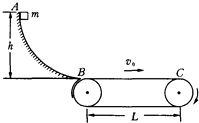
如图所示,一质量为m的滑块从高为h的光滑圆弧形槽的顶端A处由静止开始滑下,槽的底端B与水平传送带相接,传送带的运行速度恒为v0 , 两轮轴心间距为L,滑块滑到传送带上后做匀加速运动,滑到传送带右端C时,恰好加速到与传送带的速度相同,求:
-
(1) 滑块到达底端B时的速度大小vB;
-
(2) 滑块与传送带间的动摩擦因数μ;
-
(3) 此过程中,由于克服摩擦力做功而产生的热量Q.
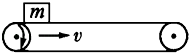
足够长的水平传送带以v=4m/s的速度匀速运行,将一质量为2kg的工件沿竖直向下的方向轻轻放在传送带上(设传送带的速度不变),若工件与传送带之间的动摩擦因数为0.2,则放手后工件在4s内的位移是多少?摩擦力对工件做功为多少?(g取10m/s2)
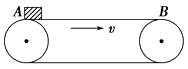
如图所示,传送带保持v=4 m/s的速度水平匀速运动,将质量为1 kg的物块无初速地放在A端,若物块与皮带间动摩擦因数为0.2,A、B两端相距6 m,则物块从A到B的过程中,皮带摩擦力对物块所做的功为多少?产生的摩擦热又是多少?(g取10 m/s2)
有一光滑的圆弧轨道  半径
半径  ,
,  点为圆弧轨道最低点,
点为圆弧轨道最低点,  为
为  圆弧,右端与一倾斜传送带相切于
圆弧,右端与一倾斜传送带相切于  点,传送带与水平方向夹角
点,传送带与水平方向夹角  ,一滑块的质量
,一滑块的质量  ,从
,从  点由静止下滑,
点由静止下滑,  长为
长为  ,滑块与传送带间的动摩擦因数
,滑块与传送带间的动摩擦因数  ,重力加速度为
,重力加速度为  ,试求:
,试求:
半径 , 点为圆弧轨道最低点, 为 圆弧,右端与一倾斜传送带相切于 点,传送带与水平方向夹角 ,一滑块的质量 ,从 点由静止下滑, 长为 ,滑块与传送带间的动摩擦因数 ,重力加速度为 ,试求: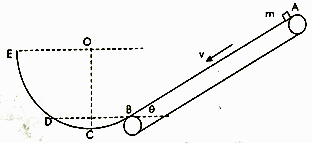
-
(1) 传送带静止时,滑块第一次通过 点后,所能达到的最大高度;
-
(2) 当传送带以
 逆时针转动时,滑块第一次到达 点的速度大小;
逆时针转动时,滑块第一次到达 点的速度大小;
-
(3) 当传送带以 逆时针转动时,滑块到达 点时,轨道对滑块的最小支持力多大。
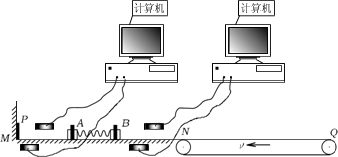
如图所示,为光电计时器的实验简易示意图,当有不透光物体从光电门间通过时, 光电计时器就可以显示物体的挡光时间,实验中所选用的光电门传感器可测的最短时间为0.01ms.光滑水平导轨 MN 上放两个相同物块 A 和 B,其宽度 a =3.0×10-2m,左端挡板处 有一弹射装置 P,右端 N 处与水平传送带平滑连接,今将挡光效果好,宽度为 d =3.6×10-3m
的两块黑色磁带分别贴在物块 A 和 B 上,且高出物块,并使高出物块部分在通过光电门时 挡光.传送带水平部分的长度 L =8m,沿逆时针方向以恒定速度 v
=6m/s 匀速传动.物块 A、B
与传送带间的动摩擦因数0.2 ,质量 mA =mB =1kg.开始时在 A 和 B 之间压缩一轻弹簧,锁定其处于静止状态,现解除锁定,弹开物块 A 和 B,迅速移去轻弹簧,之后两物块第一次通过光电门,计时器显示读数均为 t
=9.0×10-4s. g 取 10m/s2 . 试求:
-
(1) 弹簧储存的弹性势能
 ;
;
-
(2) 物块 B 沿传送带向右滑动的最远距离 Sm;
-
(3) 物块 B 滑回水平面 MN 的速度大小
 ;
;
-
(4) 若物体 B 返回水平面 MN 后与被弹射装置 P 弹回的物块 A 在水平面上相碰,且 A 和 B 碰后互换速度,则弹射装置 P 至少必须对物块 A 做多少功,才能在 AB 碰后使 B 刚好能 从 Q 端滑出?物块 B 在此滑离皮带的运动过程中,与传送带之间因摩擦产生的内能 ΔE 为 多大?(计算结果可用根号表示)
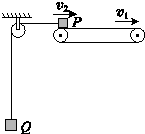
如图所示,水平传送带以速度v1匀速运动,小物体P、Q由通过定滑轮且不可伸长的轻绳相连,t=0时刻P在传送带左端具有速度v2 , P与定滑轮间的绳水平,t=t1时刻P离开传送带.不计定滑轮质量和摩擦,绳足够长.正确描述小物体P速度随时间变化的图象可能是( )
A . 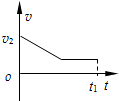 B .
B . 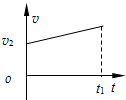 C .
C . 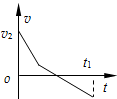 D .
D . 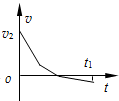
B .
C .
D .
如图所示,倾角为θ=37°的传送带以速度v=2 m/s顺时针转动。在传送带的底端静止释放一质量为2 kg的小木块,已知小木块与传送带间的动摩擦因数为μ=0.8,传送带足够长,sin37°=0.6,cos37°=0.8,取g=10 m/s2。小木块从滑上转送带至到达最高点的过程中,求
-
(1) 小木块所受摩擦力的大小
-
(2) 滑动摩擦力对小木块所做功
-
(3) 小木块上滑的过程中系统产生的热量
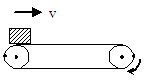
如图所示,水平传送带以恒定的速度v顺时针转动,将工件轻轻放在传送带的左端,由于摩擦力的作用,工件做匀加速运动,经过时间t,速度变为v;再经时间2t,工件到达传送带的右端,求:
-
(1) 工件在水平传送带上滑动时的加速度
-
(2) 工件与水平传送带间的动摩擦因数;
-
(3) 工件从水平传送带的左端到达右端通过的距离;
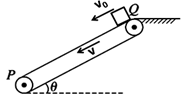
如图所示,PQ为一绷紧的传送带,始终以v=5m/s的速度逆时针运行,传送带与水平方向的夹角θ=37°。现有一质量为m的小碳从Q处以v0=3m/s的速度沿图示方向滑上传送带,已知P、Q之间的距离为6.8m,碳块与传送带间的动摩擦因数μ=0.5,g=10m/s2。(sin37°=0.6,cos37°=0.8),试求:
-
(1) 碳块在传送带上运动的总时间。
-
(2) 碳块在传送带上留下的划痕长度。
一足够长的传送带与水平面的倾角为θ , 以一定的速度匀速运动,某时刻在传送带适当的位置放上具有一定初速度的小物块,如图甲所示,以此时为计时起点t=0,小物块之后在传送带上运动速度随时间的变化关系如图乙所示,图中取沿斜面向上的运动方向为正方向,v1>v2 , 已知传送带的速度保持不变,则( )
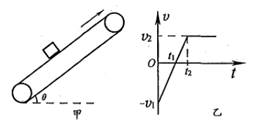
A . 小物块与传送带间的动摩擦因数μ<tanθ
B . 小物块在0~t1内运动的位移比在t1~t2内运动的位移小
C . 0~t2内,传送带对物块做功为  D . 0~t2内物块动能变化量大小一定小于物体与皮带间摩擦而产生的热量
D . 0~t2内物块动能变化量大小一定小于物体与皮带间摩擦而产生的热量
D . 0~t2内物块动能变化量大小一定小于物体与皮带间摩擦而产生的热量
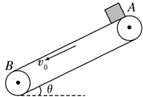
如图甲所示,水平绷紧的传送带长L=10 m,始终以恒定速率v = 4 m/s逆时针运行。A、B是传送带的左、右两端点。现在在传送带的B端轻轻放上质量为m =
1 kg的小物块(可视为质点),物块与传送带间动摩擦因数为μ=0.4,g取10 m/s2。

-
(1) 求小物块由传送带B端运动到A端所用时间;
-
(2) 若小物块以v0 = 8m/s的初速度从A端冲上传送带(如图乙所示),求小物块从传送带A端开始运动到再次回到A端的过程中的摩擦生热。
如图所示,传送带与地面夹角θ=37°,从A到B长度为L=16 m,传送带v0=10 m/s 的速率逆时针转动。在传送带上端A无初速地放一个质量为m=0.5 kg的黑色煤块,它与传送带之间的动摩擦因数为μ=0.5。煤块在传送带上经过会留下黑色痕迹。已知sin 37°=0.6,g=10 m/s2 , 求:
-
(1) 煤块从A到B的时间;
-
(2) 煤块从A到B的过程中传送带上形成痕迹的长度。
如图为X光安检机简化示意图,水平传送带穿过X光检查区域(虚线方框)后与水平接收台面相切,工作时,传送带以  的恒定速率向右运行。将质量
的恒定速率向右运行。将质量  的小箱A从左侧某位置放上传送带,A恰好能匀速进入X光检查区域。此后A到达传送带右端时与接收台上尚未取走的小箱B发生正碰(碰撞时间极短),碰后A、B一起在接收台运动
的小箱A从左侧某位置放上传送带,A恰好能匀速进入X光检查区域。此后A到达传送带右端时与接收台上尚未取走的小箱B发生正碰(碰撞时间极短),碰后A、B一起在接收台运动  后停下。已知A与传送带间的动摩擦因数
后停下。已知A与传送带间的动摩擦因数  ,A、B与接收台间的动摩擦因数相同,小箱B的质量为
,A、B与接收台间的动摩擦因数相同,小箱B的质量为  ,取
,取  。不考虑A在传送带与接收台交界处速度的变化及两小箱的大小,求:
。不考虑A在传送带与接收台交界处速度的变化及两小箱的大小,求:
的恒定速率向右运行。将质量 的小箱A从左侧某位置放上传送带,A恰好能匀速进入X光检查区域。此后A到达传送带右端时与接收台上尚未取走的小箱B发生正碰(碰撞时间极短),碰后A、B一起在接收台运动 后停下。已知A与传送带间的动摩擦因数 ,A、B与接收台间的动摩擦因数相同,小箱B的质量为 ,取 。不考虑A在传送带与接收台交界处速度的变化及两小箱的大小,求: 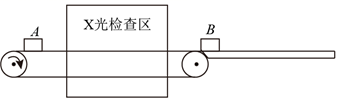
-
(1) A放上传送带时与X光检查区左端的距离;
-
(2) A、B与接收台间的动摩擦因数。
如图所示,传送带的倾角  ,从
,从  到
到  长度为
长度为  ,传送带以
,传送带以  的速度逆时针转动,在传送带上 端无初速度地放一个质量为
的速度逆时针转动,在传送带上 端无初速度地放一个质量为  的黑色煤块,它与传送带之间的动摩擦因数为
的黑色煤块,它与传送带之间的动摩擦因数为  ,煤块在传送带上经过会留下黑色划痕,已知
,煤块在传送带上经过会留下黑色划痕,已知  ,
,  ,取
,取  ,不计空气阻力和煤块质量变化,求:
,不计空气阻力和煤块质量变化,求:
,从 到 长度为 ,传送带以 的速度逆时针转动,在传送带上 端无初速度地放一个质量为 的黑色煤块,它与传送带之间的动摩擦因数为 ,煤块在传送带上经过会留下黑色划痕,已知 , ,取 ,不计空气阻力和煤块质量变化,求: 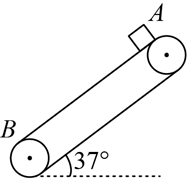
-
(1) 煤块到 点时速度的大小;
-
(2) 煤块从 到 的过程中传送带上留下划痕的长度。
-
(3) 若传送带从静止开始以加速度 逆时针加速转动,设沿传送带向下为摩擦力正方向,请写出煤块在传送带上运动过程中所受摩擦力
 与加速度 的关系式,并画出
与加速度 的关系式,并画出  图像(需要在图中标注出转折点的坐标值)。
图像(需要在图中标注出转折点的坐标值)。
如图所示,传送带与水平面夹角θ=37°,以恒定速率v=10m/s沿顺时针方向转动。现在传送带上端A处无初速度地放一质量m=1kg的小煤块(可视为质点,忽略滑动过程中的质量损失),小煤块与传送带间的动摩擦因数μ=0.5,已知传送带上A到B的长度L=16m。取sin37°=0.6,cos37°=0.8,重力加速度g=10m/s2。求:
-
(1) 小煤块刚开始运动时的加速度大小;
-
(2) 小煤块从A运动到B的时间;
-
(3) 从A到B的过程中小煤块和传送带因摩擦而产生的热量。
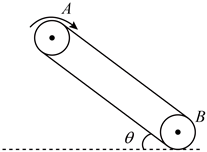
如图所示,长  的传送带PQ与水平面之间的夹角
的传送带PQ与水平面之间的夹角  ,传送带以
,传送带以  的速度沿逆时针方向匀速运动。现将质量
的速度沿逆时针方向匀速运动。现将质量  的小物块(可视为质点)轻放在传送带的底端(P点)。已知小物块与传送带间的动摩擦因数
的小物块(可视为质点)轻放在传送带的底端(P点)。已知小物块与传送带间的动摩擦因数  ,重力加速度取 ,则小物块从传送带的底端(P点)运动到顶端(Q点)所需的时间为( )
,重力加速度取 ,则小物块从传送带的底端(P点)运动到顶端(Q点)所需的时间为( )
的传送带PQ与水平面之间的夹角 ,传送带以 的速度沿逆时针方向匀速运动。现将质量 的小物块(可视为质点)轻放在传送带的底端(P点)。已知小物块与传送带间的动摩擦因数 ,重力加速度取 ,则小物块从传送带的底端(P点)运动到顶端(Q点)所需的时间为( ) 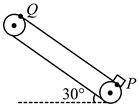
A . 1.2s
B . 1.6s
C . 2s
D . 
如图所示,水平传送带 长
长 , 其左右两侧为与传送带紧邻的等高水平面。其中右侧粗糙水平面长
, 其左右两侧为与传送带紧邻的等高水平面。其中右侧粗糙水平面长 。甲乙两物块(可视为质点)静止在紧靠B点右侧的水平面上,两物块间夹有一原长可以忽略的轻质弹簧,开始时弹簧处于压缩状态并锁定。在C点右侧有一半径
。甲乙两物块(可视为质点)静止在紧靠B点右侧的水平面上,两物块间夹有一原长可以忽略的轻质弹簧,开始时弹簧处于压缩状态并锁定。在C点右侧有一半径 且与
且与 平滑连接的光滑竖直半圆弧轨道
平滑连接的光滑竖直半圆弧轨道 , 在圆弧的最高点F处有一固定挡板,物块撞上挡板后会原速率反弹。已知两物块与传送带间的动摩擦因数均为
, 在圆弧的最高点F处有一固定挡板,物块撞上挡板后会原速率反弹。已知两物块与传送带间的动摩擦因数均为 , 物块乙与传送带右侧水平面间的动摩擦因数
, 物块乙与传送带右侧水平面间的动摩擦因数 , 传送带以
, 传送带以 顺时针传动,
顺时针传动, 。
。
长 , 其左右两侧为与传送带紧邻的等高水平面。其中右侧粗糙水平面长。甲乙两物块(可视为质点)静止在紧靠B点右侧的水平面上,两物块间夹有一原长可以忽略的轻质弹簧,开始时弹簧处于压缩状态并锁定。在C点右侧有一半径且与平滑连接的光滑竖直半圆弧轨道 , 在圆弧的最高点F处有一固定挡板,物块撞上挡板后会原速率反弹。已知两物块与传送带间的动摩擦因数均为 , 物块乙与传送带右侧水平面间的动摩擦因数 , 传送带以顺时针传动,。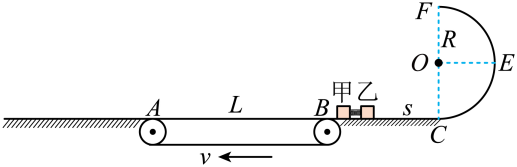
-
(1) 若已知甲质量
 , 某一时刻弹簧解除锁定,两物体弹开后甲刚好能从A点离开传送带,求传送带克服摩擦力做的功;
, 某一时刻弹簧解除锁定,两物体弹开后甲刚好能从A点离开传送带,求传送带克服摩擦力做的功;
-
(2) 在第(1)问基础上,若两物体弹开后乙刚好可以到达F点,求弹簧的弹性势能
 ;
;
-
(3) 若甲、乙质量均为
 , 在弹簧解除锁定并恢复至原长时立即取走甲物块,乙在以后的运动过程中既不脱离轨道也不从A点离开传送带,求弹簧的弹性势能
, 在弹簧解除锁定并恢复至原长时立即取走甲物块,乙在以后的运动过程中既不脱离轨道也不从A点离开传送带,求弹簧的弹性势能 的取值范围。
的取值范围。
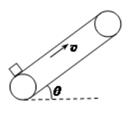
如图所示,长为L传送带方向成θ角,在电动机的带动下以速度v匀速斜向上运动,把一质量为m的物体由轻轻放在传送带的左下端,物体与传送带间的动摩擦因数为μ。过一段时间,物体沿斜面运动L1的距离时,与传送带保持相对静止,再经过一段时间到达传送带的右上端,则物体从传送带的左下端运动到右上端的整个过程中。下列说法正确的是( )
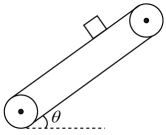
A . 摩擦力对物体做的功是μmgLcosθ
B . 摩擦力对物体做的功是mgLsinθ+ C . 物体与传送带间因摩擦产生的热量为μmgL1cosθ
D . 因放物体电动机多消耗的电能能是mgLsinθ+
C . 物体与传送带间因摩擦产生的热量为μmgL1cosθ
D . 因放物体电动机多消耗的电能能是mgLsinθ+
C . 物体与传送带间因摩擦产生的热量为μmgL1cosθ
D . 因放物体电动机多消耗的电能能是mgLsinθ+
传送带广泛的应用于物品的传输、分拣、分装等工作中,某煤炭企业利用如图所示的三角形传送带进行不同品质煤的分拣,传送带以 的速度逆时针匀速转动,两边的传送带长都是
的速度逆时针匀速转动,两边的传送带长都是 , 且与水平方向的夹角均为
, 且与水平方向的夹角均为 。现有两方形煤块A、B(可视为质点)从传送带顶端静止释放,煤块与传送带间的动摩擦因数均为0.5,下列说法正确的是( )
。现有两方形煤块A、B(可视为质点)从传送带顶端静止释放,煤块与传送带间的动摩擦因数均为0.5,下列说法正确的是( )
的速度逆时针匀速转动,两边的传送带长都是 , 且与水平方向的夹角均为。现有两方形煤块A、B(可视为质点)从传送带顶端静止释放,煤块与传送带间的动摩擦因数均为0.5,下列说法正确的是( )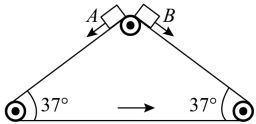
A . 煤块A,B在传送带上的划痕长度不相同
B . 煤块A,B受到的摩擦力方向都与其运动方向相反
C . 煤块A比煤块B后到达传送带底端
D . 煤块A运动至传送带底端时速度大小为
如图甲,一带电物块无初速度地放在传送带底端,皮带轮以恒定大小的速率沿顺时针方向传动,该装置处于垂直纸面向里的匀强磁场中,物块由底端E运动至皮带轮顶端F的过程中,其v-t图像如图乙所示,物块全程运动的时间为4.5 s,运动过程中物块所带电荷不变。关于带电物块及运动过程的说法正确的是( )
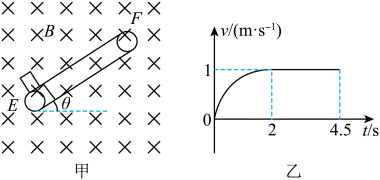
A . 该物块带负电
B . 传送带的传动速度大小一定不小于1 m/s
C . 若已知传送带的长度,可求出该过程中物块与传送带发生的相对位移
D . 在2~4.5 s内,物块与传送带仍可能有相对运动
最近更新
- (8分)下图是维生素A的分子结构:(1)维生素A中的含氧官能团是 (写名称);(2)维生素A的分子
- 下列有关“ 骨架或支架 ” 的叙述不正确的是()A .真核细胞中有维持细胞形态、保持细胞内部结构有序性的细胞骨架B .磷
- 下列热化学方程式书写正确的是(的绝对值均正确)( ) A.C2H5OH(l)+3O2(g) = 2CO2 (g)+
- 在体细胞的增殖过程中,肯定发生的是 () A.DNA含量的变化
- 反比例函数的图象在( ) A.第一、三象限 B.第一、四象限 C.第一、二象限 D.第三、四
- 如图,将△沿、、翻折,三个顶点均落在点处,若,则的度数为【 ▲ 】A. B. C. D.
- 图为测定运动员体能的装置,轻绳拴在腰间沿水平线跨过定滑轮(不计滑轮的质量与摩擦),下悬重为G的物体。设人的重心相对地面不
- (08年南京一中三模)(8分)为测定某电源内阻r和一段金属电阻丝单位长度的电阻R0,设计如图所示的电路。ab是一段粗细均
- 简述孙权“轻敌兵败”的一个典型情节。
- 有一种绣球花的花色因土壤pH不同而异,pH大于7时开蓝色花,pH小于7时开桃色花,这是因为土壤pHA.是一种诱变因素
- 已知点F,直线l:x=-,点B是l上的动点.若过B垂直于y轴的直线与线段BF的垂直平分线交于点M,则点M的轨迹是() A
- 在核反应方程的括弧中,X所代表的粒子是( ) A. B.
- 已知函数满足,且的导函数,则的解集为 ( ) A. B. C. D.
- 右图为一个人类白化病遗传的家族系谱图。6号和7号为同卵双生,即由同一个受精卵发育而成的两个个体;8号和9号为异卵双生,
- 已知反比例函数y=的图象如图,则二次函数y=2kx2﹣4x+k2的图象大致为() A.B.C.D.
- 我校的贝贝同学用了几分钟的时间便将参加全国作文大赛的稿件送到了北京组委会编辑部,这应得益于哪项技术的发展( ) A
- 1923年,陈独秀说:“五四运动虽然未能达到理想的成功,而在此运动中最努力的革命青年,逐渐接受世界的革命思潮,由空想而实
- 体液免疫和细胞免疫反应阶段的淋巴细胞内,所能进行的生理过程是 A.两者都只有① B.两者都只有
- 小明同学对探究分子性质的实验(图1)进行了改进.如图2所示,试管丁、戊中各有一张每隔2厘米滴有一滴酚酞溶液的滤纸条.装有
- 青藏高原被称为世界屋脊,回答问题 有“高原之舟”之称的牲畜是 A.马



