4.4 牛顿第三定律 知识点题库
国际单位制中规定,力学物理量所选用的基本量是( )
A . 米、千克、秒
B . 长度、质量、时间
C . 长度、力、质量、
D . 长度、力、时间
高空杂技表演中,固定在同一悬点的两根长均为L的轻绳分别系着男、女演员,他们在同一竖直面内先后从不同高度相向无初速摆下,在最低点相拥后,恰能一起摆到男演员的出发点。已知男、女演员质量分别为M、m , 女演员的出发点与最低点的高度差为  ,重力加速度为g,不计空气阻力,男、女演员均视为质点
,重力加速度为g,不计空气阻力,男、女演员均视为质点
,重力加速度为g,不计空气阻力,男、女演员均视为质点
-
(1) 求女演员刚摆到最低点时对绳的拉力大小;
-
(2) 若两人接着从男演员的出发点一起无初速摆下,到达最低点时男演员推开女演员,为了使女演员恰能回到其最初出发点,男演员应对女演员做多少功?
三个质量相同的物体A、B、C如图所示放置在光滑的水平面上,斜劈A的倾角为  ,B的上表面水平,现对A施加水平向左的力
,B的上表面水平,现对A施加水平向左的力  ,三个物体相对静止一起向左匀加速运动,重力加速度为
,三个物体相对静止一起向左匀加速运动,重力加速度为  ,下列说法正确的是( )
,下列说法正确的是( )
,B的上表面水平,现对A施加水平向左的力 ,三个物体相对静止一起向左匀加速运动,重力加速度为 ,下列说法正确的是( )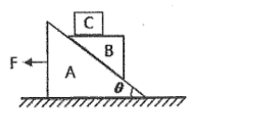
A . B,C间的摩擦力大小为  B . A,B间的摩擦力大小为
B . A,B间的摩擦力大小为 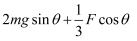 C . 若A,B间,B,C间动摩擦因数相同,则 逐渐增大,A、B间先滑动
D . 若A,B间,B,C间动摩擦因数相同,则 逐渐增大,B,C间先滑动
C . 若A,B间,B,C间动摩擦因数相同,则 逐渐增大,A、B间先滑动
D . 若A,B间,B,C间动摩擦因数相同,则 逐渐增大,B,C间先滑动
B . A,B间的摩擦力大小为
C . 若A,B间,B,C间动摩擦因数相同,则 逐渐增大,A、B间先滑动
D . 若A,B间,B,C间动摩擦因数相同,则 逐渐增大,B,C间先滑动
国际单位制中,下列哪些是电场强度的单位( )
A . 牛顿每库仑(N/C)
B . 伏特每米(V/m)
C . 焦耳每库仑(J/C)
D . 电子伏(eV)
质量为m、带电荷量为q的小物块,从倾角为θ的光滑绝缘斜面上由静止下滑,整个斜面置于方向水平向里的匀强磁场中,磁感应强度为B,如图所示.若带电小物块下滑后某时刻对斜面的作用力恰好为零,下面说法中正确的是( )

A . 小物块下滑时受洛伦兹力方向垂直斜面向下
B . 小物块在斜面上运动时做匀加速直线运动且加速度为gsinθ
C . 小物块在斜面上运动时做加速度增大,而速度也增大的变加速直线运动
D . 小物块在斜面上从下滑到对斜面压力为零用的时间为 
一列复兴号动车组共8节车厢,总重400吨,某一次它从静止开始加速到360km/h用了400s。若把此过程看作是匀加速直线运动,g取10m/s2 , 求此过程中:
-
(1) 列车的加速度大小;
-
(2) 列车加速到360km/h的过程中走了多少公里;
-
(3) 假设刚启动阶段列车阻力为车重的0.1倍,求此时列车的牵引力有多大。
一个物体以初速度  从斜面底端开始沿斜面上滑,到达最高点后又返回斜面底端时的速度大小为
从斜面底端开始沿斜面上滑,到达最高点后又返回斜面底端时的速度大小为  ,物体和斜面之间的动摩擦因数处处为µ,斜面倾角为θ, 上滑时加速度大小为
,物体和斜面之间的动摩擦因数处处为µ,斜面倾角为θ, 上滑时加速度大小为  ,下滑时加速度大小为
,下滑时加速度大小为  , 上滑时间为
, 上滑时间为  , 下滑时间为
, 下滑时间为  .则下列判断正确的是( )
.则下列判断正确的是( )
从斜面底端开始沿斜面上滑,到达最高点后又返回斜面底端时的速度大小为 ,物体和斜面之间的动摩擦因数处处为µ,斜面倾角为θ, 上滑时加速度大小为 ,下滑时加速度大小为 , 上滑时间为 , 下滑时间为 .则下列判断正确的是( )
A . =
B .  C .
C .  D .
D . 
=
B .
C .
D .
两根长度不同的细线下面分别悬挂着小球,细线上端固定在同一点,若两个小球以相同的角速度,绕共同的竖直轴在水平面内做匀速圆周运动,则两个小球在运动过程中的相对位置关系示意图正确的是( )
A .  B .
B . 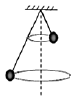 C .
C .  D .
D . 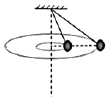
B .
C .
D .
质量为2kg的木箱静止在水平地面上,在水平恒力F=18N的作用下运动,2s末撤去力F,若地面与木箱之间的动摩擦因数μ=0.4,g=10m/s2 , 求:
-
(1) 物体在水平面上运动时受到的摩擦力多大?
-
(2) 撤去力F瞬间物体速度的大小是多少?
-
(3) 撤去外力后物体还能在水平面滑行多远?
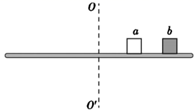
如图所示,两个小木块a和b(可视为质点)放在水平圆盘上,a的质量是2m,b的质量是m。a、b的连线通过盘的圆心,a与通过圆心的竖直转轴OO'的距离为l,b与转轴的距离为2l,a和b与圆盘的动摩擦因数均为k,(设最大静摩擦力等于滑动摩擦力),重力加速度大小为g。若圆盘带着木块一起绕转轴匀速转动,用ω表示圆盘转动的角速度,下列说法正确的是( )
A . a、b所受的摩擦力方向相同
B . a、b所受的摩擦力方向相反
C . ω=  时,a、b所受的摩擦力大小相等
D . ω= 时,b所受的摩擦力大于a所受的摩擦力
时,a、b所受的摩擦力大小相等
D . ω= 时,b所受的摩擦力大于a所受的摩擦力
时,a、b所受的摩擦力大小相等
D . ω= 时,b所受的摩擦力大于a所受的摩擦力
周末小明帮爸爸做点力所能及的事情,他们要把一批质量均为  的箱子搬上车厢运走,爸爸在车厢与地面之间固定了一条长为
的箱子搬上车厢运走,爸爸在车厢与地面之间固定了一条长为  的木板,木板与地面夹角为
的木板,木板与地面夹角为  ,小明在车厢上通过轻绳往上拉箱子。已知箱子与木板间的动摩擦因数为
,小明在车厢上通过轻绳往上拉箱子。已知箱子与木板间的动摩擦因数为  ,重力加速度 取
,重力加速度 取  ,箱子可看做质点。
,箱子可看做质点。
的箱子搬上车厢运走,爸爸在车厢与地面之间固定了一条长为 的木板,木板与地面夹角为 ,小明在车厢上通过轻绳往上拉箱子。已知箱子与木板间的动摩擦因数为 ,重力加速度 取 ,箱子可看做质点。 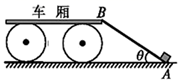
-
(1) 开始小明一人尝试用
 的力沿着木板方向往上拉木板上的一个箱子,结果箱子没动,求此时箱子受到木板摩擦力多大。
的力沿着木板方向往上拉木板上的一个箱子,结果箱子没动,求此时箱子受到木板摩擦力多大。
-
(2) 后来爸爸帮忙沿着木板方向往上施加力
 ,如果小明仍用(1)中的
,如果小明仍用(1)中的  往上拉一个箱子,经过
往上拉一个箱子,经过  时间箱子从木板下端
时间箱子从木板下端  处拉到上端
处拉到上端  处,求 是多大。
处,求 是多大。
AB是处于竖直平面内的光滑圆弧轨道,O为圆心,半径R=0.9m。BC是长度L=3m的水平传送带,CD是足够长的水平轨道,质量m=60kg的物体(可视为质点)从A处由静止下滑,OA与竖直方向OB的夹角  。已知物体与传送带及水平轨道的动摩擦因数分别为
。已知物体与传送带及水平轨道的动摩擦因数分别为  、
、  ,
,  ,忽略物体通过B点和C点时的能量损失。求:
,忽略物体通过B点和C点时的能量损失。求:
。已知物体与传送带及水平轨道的动摩擦因数分别为 、 , ,忽略物体通过B点和C点时的能量损失。求: 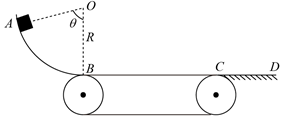
-
(1) 物体运动到B点时的速度大小;
-
(2) 若传送带以v=3m/s的速度顺时针转动,物体通过B点后向右运动的最大距离;
-
(3) 若传送带以v=4m/s的速度顺时针转动,物体因克服摩擦产生的总热量。
《中国制造  》是国家实施强国战略第一个十年行动纲领,智能机器制造是一个重要方向,其中智能机械臂已广泛应用于各种领域。如图所示,一机械臂铁夹夹起一个金属小球,小球在空中处于静止状态,铁夹与球接触面保持竖直,则( )
》是国家实施强国战略第一个十年行动纲领,智能机器制造是一个重要方向,其中智能机械臂已广泛应用于各种领域。如图所示,一机械臂铁夹夹起一个金属小球,小球在空中处于静止状态,铁夹与球接触面保持竖直,则( )
》是国家实施强国战略第一个十年行动纲领,智能机器制造是一个重要方向,其中智能机械臂已广泛应用于各种领域。如图所示,一机械臂铁夹夹起一个金属小球,小球在空中处于静止状态,铁夹与球接触面保持竖直,则( ) 
A . 铁夹对小球的两个弹力为作用力与反作用力
B . 若增大铁夹对小球压力,小球受到的摩擦力变大
C . 小球受到3个力的作用
D . 若铁夹水平加速移动,铁夹对小球作用力的方向为斜向上
2020年12月17日“嫦娥五号”返回器成功返回,并带回来1.73kg月球土壤,这是时隔44年人类再一次获得月球土壤,全体中国人都为之自豪。假设返回器在接近地面时以10m/s2的加速度竖直向下做匀减速运动,则这些月球土壤对返回器的压力为N,此时土壤处于状态(选填“超重”或“失重”)。
如图,在竖直平面内有O、P两点,OP连线与竖直方向夹角为37°。长1.5m不可伸长的细绳一端固定在O点,另一端拴有质量为0.4kg、可视为质点的小球,小球竖直悬挂且恰不与地面接触,O到墙的水平距离为1.2m。P处装有刀片,细线碰到刀片立即被割断。质量为1.4kg的滑块水平向右撞击小球,小球垂直击中墙面,且撞后滑块运动到墙角处时的速度恰好减为零。已知滑块与地面的动摩擦因数为 , 重力加速度g=10m/s2 , sin37°=0.6,cos37°=0.8,求:
, 重力加速度g=10m/s2 , sin37°=0.6,cos37°=0.8,求:
, 重力加速度g=10m/s2 , sin37°=0.6,cos37°=0.8,求: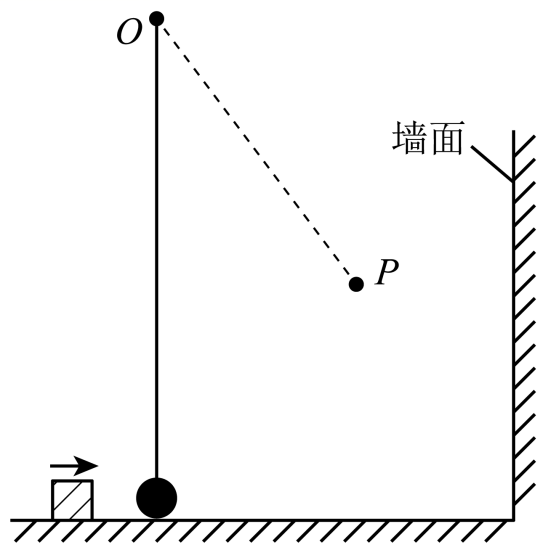
-
(1) 滑块与小球碰后瞬间,滑块的速度大小;
-
(2) 滑块与小球碰后瞬间,细线的拉力大小;
-
(3) 滑块与小球碰撞过程中损失的机械能。
某学习小组在实验室发现一盒子内有8个相同的钩码,由于标识模糊,无法知道钩码的质量。为了测定钩码的质量,找到了以下实验器材:一端带定滑轮的长木板,质量为228g的木块、打点计时器、电源、纸带、坐标纸、细线等。他们设计了以下实验步骤:
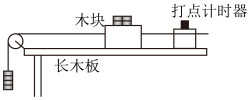
A.如图所示,将长木板置于水平桌面上,把打点计时器固定在长木板上并与电源连接,纸带穿过打点计时器并与木块相连,细线一端与木块相连,另一端跨过定滑轮挂上钩码,其余钩码都叠放在木块上;
B.使木块靠近打点计时器,接通电源,释放木块,打点计时器在纸带上打下一系列点,记下悬挂钩码的个数n;
C.将木块上的钩码逐个移到悬挂钩码端,更换纸带,重复实验操作B;
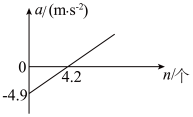
D.通过纸带算出,悬挂不同钩码个数n所对应的加速度a;
E.以a为纵坐标,n为横坐标,建立直角坐标系作出a-n图像。则;
-
(1) 该实验中,打点计时器使用的电源为 ( 选填“直流电”或“交流电”)。
-
(2) 为了利用以上器材完成实验,还需要下列器材是____。A . 秒表 B . 螺旋测微器. C . 毫米刻度尺 D . 干电池
-
(3) 如图,为由实验数据作出的a-n图象,重力加速度g=9.8 m/s2。由图可知,单个钩码的质量为g(保留三位有效数字)。此实验还可以测出木块与木板间的动摩擦因数为
-
(4) 在上述实验过程中,如果平衡了摩擦力,则与未平衡摩擦力相比,作出的a-n图线的斜率。(选填“变大”、“不变”或“变小”)。
如图甲所示,水平面上一质量为m的物体在水平力F作用下开始加速运动,力F的功率 保持恒定,运动过程中物体所受的阻力f大小不变,物体速度最终达到最大值
保持恒定,运动过程中物体所受的阻力f大小不变,物体速度最终达到最大值 , 此过程中物体速度的倒数
, 此过程中物体速度的倒数 与加速度a的关系图像如图乙所示。根据图像所给信息可知以下说法中错误的是( )
与加速度a的关系图像如图乙所示。根据图像所给信息可知以下说法中错误的是( )
保持恒定,运动过程中物体所受的阻力f大小不变,物体速度最终达到最大值 , 此过程中物体速度的倒数与加速度a的关系图像如图乙所示。根据图像所给信息可知以下说法中错误的是( )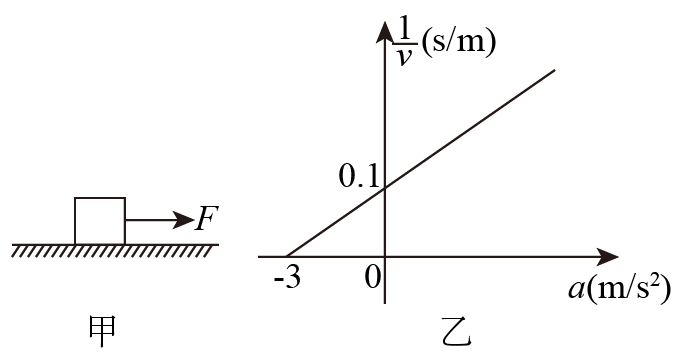
A . 图像的斜率为 B .
B .  C .
C .  D .
D . 
B .
C .
D .
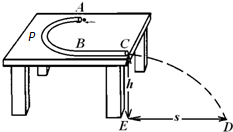
如图所示,用内壁光滑的薄壁细圆管弯成的由半圆形APB(圆半径比细管的内径大得多)和直线BC组成的轨道固定在水平桌面上,已知APB部分的半径R=1.0 m,BC段长L=1.5m.弹射装置将一个小球(可视为质点)以v0=5m/s的水平初速度从A点弹入轨道,小球从C点离开轨道随即水平抛出,落地点D离开C的水平距离s=2m,不计空气阻力,g取10m/s2 . 求:
-
(1) 小球在半圆轨道上运动时的角速度ω和加速度a的大小;
-
(2) 小球从A点运动到C点的时间t;
-
(3) 桌子的高度h.
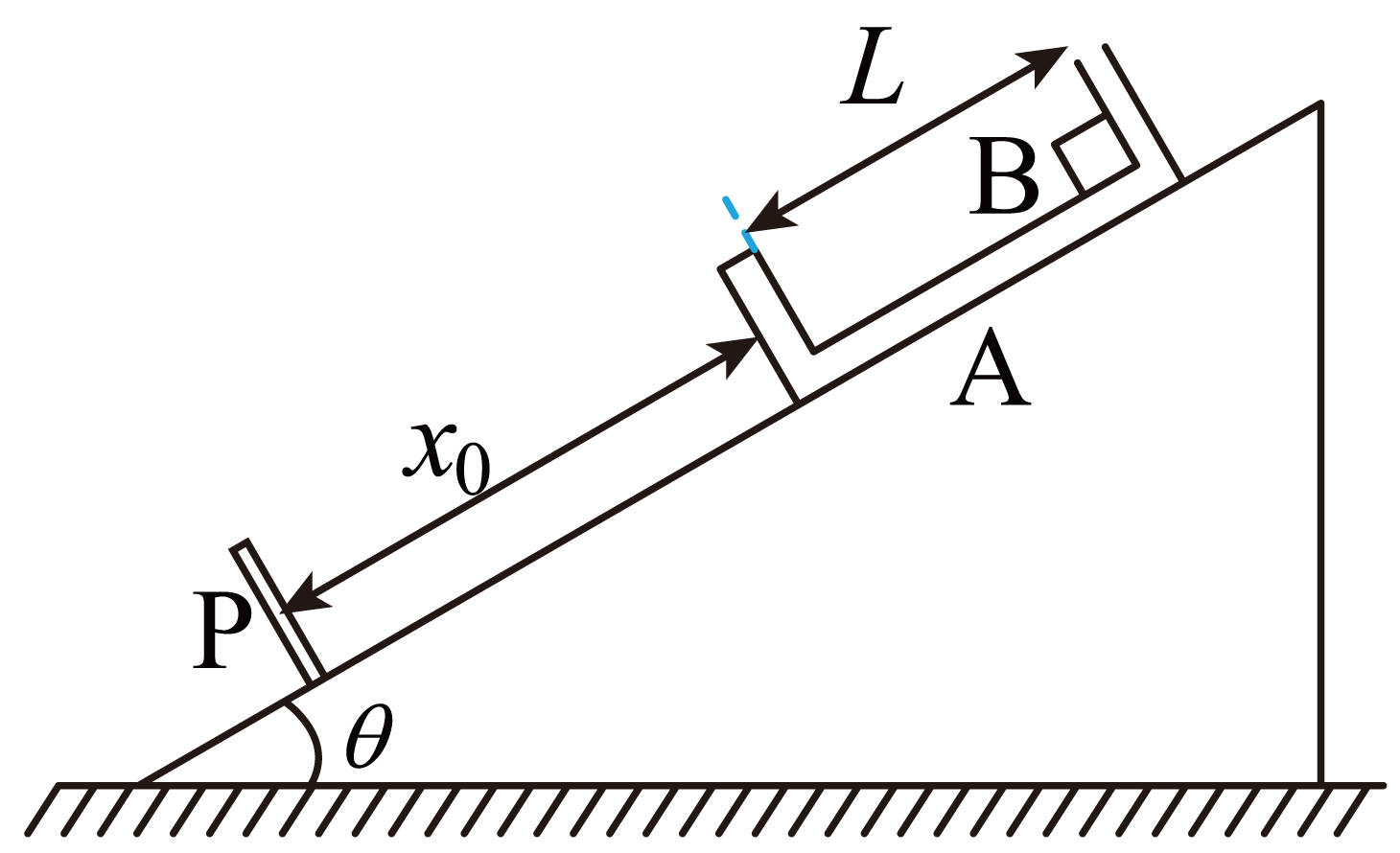
如图所示,倾角θ=30°的足够长光滑斜面固定在水平面上,斜面上某位置固定有垂直于斜面的挡板P。质量
 的凹槽A在外力作用下静止在斜面上,凹槽A下端与固定挡板间的距离
的凹槽A在外力作用下静止在斜面上,凹槽A下端与固定挡板间的距离
 , 凹槽两端挡板厚度不计。质量
的小物块B(可视为质点)紧贴凹槽上端放置,物块与凹槽间的动摩擦因数
, 凹槽两端挡板厚度不计。质量
的小物块B(可视为质点)紧贴凹槽上端放置,物块与凹槽间的动摩擦因数
 。
。
 时撤去外力,凹槽与物块一起自由下滑,
时撤去外力,凹槽与物块一起自由下滑,
 时物块与凹槽发生了第一次碰撞。整个运动过程中,所有碰撞均为弹性碰撞,且碰撞时间极短,可忽略不计。重力加速度
时物块与凹槽发生了第一次碰撞。整个运动过程中,所有碰撞均为弹性碰撞,且碰撞时间极短,可忽略不计。重力加速度
 ,
,
 。求:
。求:
的凹槽A在外力作用下静止在斜面上,凹槽A下端与固定挡板间的距离
, 凹槽两端挡板厚度不计。质量
的小物块B(可视为质点)紧贴凹槽上端放置,物块与凹槽间的动摩擦因数
。
时撤去外力,凹槽与物块一起自由下滑,
时物块与凹槽发生了第一次碰撞。整个运动过程中,所有碰撞均为弹性碰撞,且碰撞时间极短,可忽略不计。重力加速度
,
。求:
-
(1) 凹槽与挡板发生第一次碰撞前瞬间物块的速度大小;
-
(2) 凹槽的长度;
-
(3) 凹槽与挡板发生第二次碰撞时,物块到挡板P的距离;
-
(4) 从凹槽与物块一起自由下滑开始(),到物块与凹槽发生第二次碰撞时所用的时间。
抛石机是古代战场的破城重器(如图甲),可简化为图乙所示。将石块放在长臂A端的半球形凹槽,在短臂B端挂上重物,将A端拉至地面然后突然释放,石块过最高点P时就被水平抛出。已知转轴O到地面的距离 ,
,  , 质量
, 质量 的石块从P点抛出后的水平射程达到90m,不计空气阻力和所有摩擦,取
的石块从P点抛出后的水平射程达到90m,不计空气阻力和所有摩擦,取 , 求:
, 求:
, , 质量的石块从P点抛出后的水平射程达到90m,不计空气阻力和所有摩擦,取 , 求: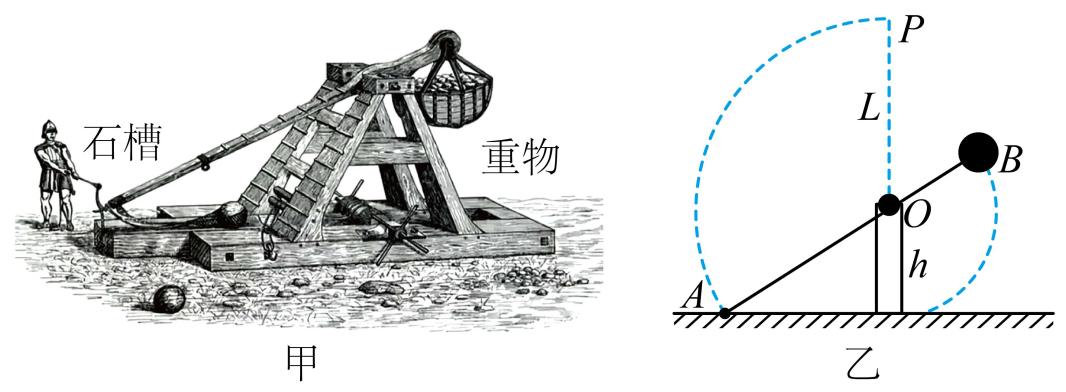
-
(1) 石块落地时速度的大小;
-
(2) 石块到达P时对凹槽压力的大小及方向。
最近更新
- Boredwith life in the city, he moved to a remote village ___
- 染色体片段缺失是常见的染色体结构变异,缺失染色体与其正常染色体配对如下图。用显微镜检查这种改变需使用下列哪种试剂() A
- 古代诗歌阅读。(共11分) 阅读下面这首宋词,完成8~9题。 绮 怀 清·黄景仁① 几回花下坐吹箫,银汉红墙②入望遥
- (08年银川一中一模) 设=(1,-2),=(a,-1),=(-b,0),a>0,b>0,O为坐标原点,若
- 下面有关“核外电子的运动状态”的说法,错误的是()。 A.各原子轨道的伸展方向种数按p、d、f的顺序分别为3、5、7 B
- 下列有关物质分类的说法,不正确的是( )A.Na2CO3是钠盐、碳酸盐,也是正盐 B.H2SO4是含氧酸、二元酸,
- The team ________ having a meeting . A. is B. are
- 如图4-4-5所示,匀速转动的水平圆盘上,沿半径方向放着用细线连着的质量相等的物体A和B,它们与盘间的动摩擦因数相等.当
- 以下对三民主义的评述,正确的是( ) ①民族主义反映了中国人民实现民族独立的愿望;②民权主义是要建立资产阶级共和国
- 阅读下面的材料,根据要求作文。 人类已迈入21世纪。科技的高度发展,为人类提供了丰富的物质财富。但作为有血有肉有感情的人
- 在恒容密闭容器中存在下列平衡: 。 的平衡物质的量浓度与温度T的关系如右图所示。下列说法错误的是
- 下列与蛋白质、核酸相关的叙述,错误的是( ) A.一个核糖体上可以同时合成多条多肽链 B.一个蛋白质分子可以含有多
- “民主、法制、自由、人权、平等、博爱等等,这不是资本主义所特有的,这是全世界在漫长的历史过程中共同形成的文明成果,也是人
- 如图所示,两根完全相同的弹簧下挂一质量为m的小球,小球与地面间有细线相连,处于静止状态,细线竖直向下的拉力大小为2mg。
- 下列有关环境问题的说法正确的是() A.农药本身有毒,应禁止施用农药 B.推广使用脱硫煤,可以减少雾霾天气 C.用活性炭
- 该法在起草、初审、修改、再审等一系列筹备过程中,始终坚持信息公开和公众参与,整个过程完全开放,听取公众意见贯穿始终。这一
- 下图所示的实验过程中产生的现象与对应的图形不相符合的是A.向AlCl3溶液中滴加氨水至过量B.向NaOH溶液中滴入AlC
- 有机物分子中原子间(或原子与原子团间)的相互影响会导致物质化学性质的不同。下列事实不能说明上述观点的是 A.苯酚能跟Na
- 记承天寺夜游 元丰六年十月十二日夜,解衣欲睡,月色入户,欣然起行。念无与为乐者,遂至承天寺寻张怀民。怀民亦未寝,
- 在世界历史上,距今1200多年成为地跨欧、亚、非三洲的大帝国是: A 亚历山大帝国 B 罗马帝国 C 阿拉伯帝国 D 奥



