浙江省杭州市周边重点中学2022-2023学年高二下学期通用技术4月期中试
浙江省杭州市周边重点中学2022-2023学年高二下学期通用技术4月期中试
教材科目:通用技术
试卷分类:高二下学期
文件类型:.doc
发布时间:2026-07-01
授权方式:免费下载
下载地址:点此下载
教材科目:通用技术
试卷分类:高二下学期
文件类型:.doc
发布时间:2026-07-01
授权方式:免费下载
下载地址:点此下载
以下为试卷部分试题预览
| 1. 单选题 | 详细信息 |
2022年11月,随着神舟十五号成功发射,我国空间站建设也迎来收官。下列关于空间站的描述不正确的是( )
A . 空间站能保障航天员进行各项实验,体现了技术的目的性
B . 空间站几个舱段分布合理,形成一个“T”字型结构,体现了设计的技术规范原则
C . 空间站的各项操作都是处于微重力的环境下进行,体现了技术的复杂性
D . 中国空间站的建成,体现了技术具有解放人的作用
|
|
| 2. 单选题 | 详细信息 |
如图所示是目前市面上比较流行的简易手机支架,下列关于该支架的 分析和评价不合理的是( )
A . 可以折叠起来放入抽屉或者收纳盒里,主要考虑了环境的因素
B . 各个边角圆弧处理,实现了人机关系的安全目标
C . 套管连接改变支架的高度,说明事物的结构对其功能的影响
D . 支撑底板可以实现仰角120°调节,满足人的动态尺寸
|
|

| 3. 单选题 | 详细信息 |
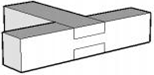
小明准备用实木制作如图所示的一个夹榫,从结构的稳固程度考虑,下列方案合理的是( )
A .
 B .
B . 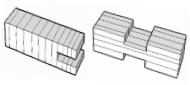 C .
C . 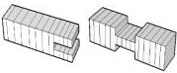 D .
D . 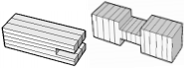
|
|
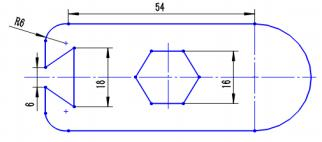
| 4. 单选题 | 详细信息 |
如图所示是小明设计的某零件图样, 零件的外圆面均相切,请根据题图完成小题。
|
|
| 5. 单选题 | 详细信息 |
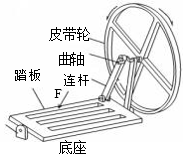
如图所示是老式缝纫机踏板传动机构示意图。踏板与连杆相连接,连杆连接曲轴,曲轴带动皮带轮转动,当踏板受到图示状态下的力F时,下列说法正确的是( )
A . 踏板受压,连杆受拉,曲轴受弯曲
B . 踏板受弯曲,连杆受拉,曲轴受弯曲和受扭转
C . 踏板受弯曲,连杆受压,曲轴受弯曲和受扭转
D . 曲轴与皮带轮铰连接,踏板与连杆刚连接
|
|
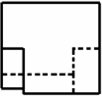
| 6. 单选题 | 详细信息 |
如图所示是某形体的主视图和左视图,下列相对应的俯视图是( )
A .
 B .
B . 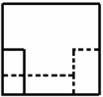 C .
C . 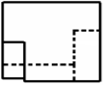 D .
D . 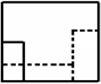
|
|

| 7. 单选题 | 详细信息 |
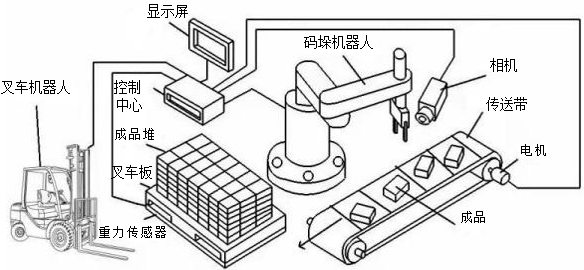
如图所示的码垛运输系统,包含成品转运子系统和机器人码垛子系统,成品转运子系统工作过程: 当相机拍摄区域检测到传送带上有成品时,传送带暂停,相机拍摄成品图像并传送到控制中心,控 制中心根据成品相对基准位置的偏差,控制码垛机器人抓取成品进行有序堆放。机器人码垛子系统 工作过程:重力传感器检测到的压力值传输给控制中心,当数值达到设定值时,控制中心控制叉车 机器人将叉车板上的成品运输至包装车间;叉车机器人运输完成后,传送带启动,系统继续进行码 垛。请根据示意图和描述完成小题。
|
|
| 8. 单选题 | 详细信息 |
小明准备焊接如图所示的电路原理图,下列器材中不需要的是( )
A .
 面包板
B . 面包板
B .  万能板
C . 万能板
C .  电烙铁
D . 电烙铁
D .  高温海绵 高温海绵
|
|
| 9. 单选题 | 详细信息 |
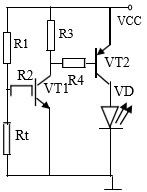
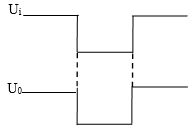
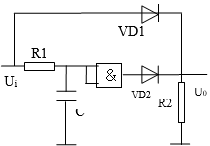
如图所示电路,电路中的电子元器件正常工作,Ui为输入信号,负载R2上的信号U0为输出信号,下列输出波形与输入波形关系中可能的是( )
A .
 B .
B . 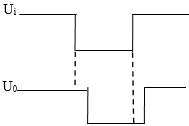 C .
C . 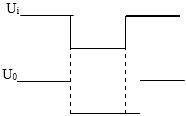 D .
D . 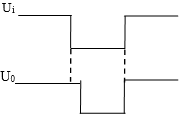
|
|
| 10. 单选题 | 详细信息 |
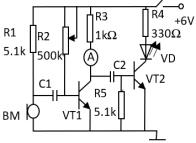
如图所示是小明参照课本中的案例分析搭建的发光二极管亮度跟随声音音量变化电路。为了电路能正常工作,小明对该电路进行分析和调试,下列说法中正确的是( )
A . 静音时,VT1、VT2均工作于放大状态
B . 可以用指针式多用电表R×1K挡判断VD好坏
C . 调换BM与R1位置,电路将不能正常工作
D . 测得流过R3电流5.6mA,应调大R2阻值
|
|
高中通用技术 试卷推荐
- 浙江省诸暨市2019-2020学年高一上学期通用技术期末考试试卷
- 浙江省教育绿色评价联盟2020届高三通用技术6月适应性考试试卷
- 浙江省2019年高考选考科目考试通用技术押题4
- 浙江省名校协作体2019届高三上学期通用技术9月联考试卷
- 浙江省杭州市八校联盟2018-2019学年高二下学期通用技术期中联考试卷
- 浙江省金华市江南中学2020届高三通用技术网课2月29日第三周测试卷
- 粤科版高中通用技术第三节 感受设计与技术的关系 练习题
- 云南省昆明市黄冈实验学校2018-2019学年高一上学期通用技术期中考试试卷
- 高中通用技术 技术与设计2 第四单元 控制与设计测试卷
- 浙江省普通高中强基联盟2020届高三上学期通用技术12月统测试卷
- 浙江省“山水联盟”2019-2020学年高二下学期通用技术期中考试试卷
- 高中通用技术粤科版必修1第三章 制订我的设计方案 检测题
最近更新
- --Last Sunday we didn’t go to see the film or to the play in
- (14分)由丙烯经下列反应可得到F和高分子化合物G,它们都是常用的塑料。 请回答下列问题: (1)F的分子式
- 关于北京时间的叙述,下列说法错误的是 A.北京时间是东八区的区时 B.北京时间是东八区中央经线的地方时 C
- 2009年l月22日,美元对人民币的汇率为6.837元,至10月22曰,美元对人民币汇率收盘价为6.827元。据此回答1
- 下列运动中,加速度发生变化的是 A.平抛运动 B.斜抛运动 C.自由落体运动 D.匀速度圆周运动
- 在人的个体发育过程中,精子和卵细胞结合成受精卵的部位是( ) A.输卵管 B.卵巢 C.子宫 D.阴道
- 如图1,已知直线y=kx与抛物线交于点A(3,6).(1)求直线y=kx的解析式和线段OA的长度; (2)点P为抛物线第
- Children who are raised in households withdogs during their
- 如图所示,水下光源S向水面A点发射一束光线,折射后分为a、b两束,则( ) A.a光的波动性比b光强B.在水中a光
- 对于任意实数和,不等式恒成立,则实数的取值范围为 .
- 我国史学界普遍认为武汉、广州失守之后抗日战争进入了战略相持阶段,之前为战略防御阶段。下列战役发生于战略防御阶段的是 ①太
- 在相同温度和压强下,将32 g硫分别在纯氧中和空气中完全燃烧,令前者放出热量为Q1,后者放热为Q2,则关于Q1和Q2的相
- 下列关于特异性免疫的叙述,不正确的是()A. 体液中的溶菌酶消灭病原体不属于特异性免疫 B. 浆细胞与效应T细胞相比,内
- 若A、B、C是三个集合,则“A∩B=C∩B”是“A=C”的A.充分非必要条件
- 高温下硫酸亚铁发生如下反应:2FeSO4Fe2O3+SO2↑+SO3↑,若将生成的气体通入氯化钡溶液中,得到的沉淀物是(
- 某几何体的一条棱长为,在该几何体的正视图中,这条棱的投影是长为 的线段,在该几何体的侧视图与俯视图中,这条棱的投影分别是
- 在函数y=(k>0)的图象上有三点A1(x1,y1),A2(x2,y2),A3(x3,y3),已知x1<x2
- (2009江西卷理)(本小题满分12分)已知点为双曲线(为正常数)上任一点,为双曲线的右焦点,过作右准线的垂线,垂足为,
- 历史课堂上王老师向同学们给出四个提示(如右图),这里讲述的内容是A.北魏孝文帝改革
- 某研究小组进行如下表所示的原电池实验:实验编号 ① ② 实验装置 实验现象 连接装置5 分钟后,灵敏电流计指针向左偏转,



