高中通用技术:
高中 通用技术
如图所示的组合逻辑电路,与其等效的逻辑表达式是( )
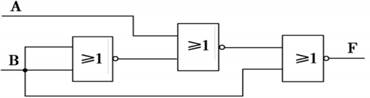
A .  B .
B .  C .
C .  D .
D .
B .
D . ![]()
下列属于闭环控制系统的是( )
A . 电话机的自动拨号控制
B . 微波炉定时控制
C . 孵化房恒温控制
D . 自动售货机
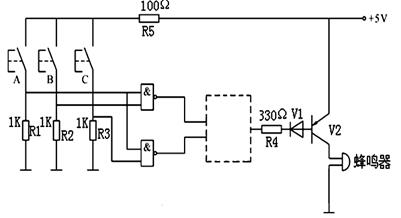
如图所示的是一个裁判判定电路,请回答问题。
-
(1) 测试电路时发现R4损坏了,下列电子元器件中,可代替电阻R4(阻值为330Ω)的是( )A . 电感器
 B . 电位器
B . 电位器  C . 光敏电阻
C . 光敏电阻  D . 电解电容
D . 电解电容 
-
(2) 裁判判定的规则:有三名裁判,其中A是主裁判,B、C是副裁判。要求只有当主裁判A按下按钮,且副裁判B和C至少有一位按下按钮才算成功,此时蜂鸣器响,虚线框内应选择的逻辑门电路是( )A .
 B .
B .  C .
C .  D .
D . 
如图所示是一款折叠床。下列关于该产品的设计分析和评价中不正确的是( )

A . 精选优质五金,持久耐用,主要考虑物的因素
B . 折叠后空间立省一半,主要考虑环境的因素
C . 边角细致打磨,主要考虑人的因素
D . 采用榫卯连接,符合设计的技术规范原则
如图所示为可内外旋转的窗户。该窗户转动自如,清洗方便,还可以放置植物。雨天可以把它们放在外面,而寒冷的冬天,可以把它们转回来。请回答问题。

-
(1) 要对该窗户进行技术试验,下列试验中,不合理的是( )A . 旋转试验:转动窗户,观察其是否能180°灵活旋转 B . 密封性试验:关闭窗户,下雨天观察窗内是否有渗漏现象 C . 稳定性试验:打开窗户,刮风时观察窗户的振动大小 D . 承重试验:用铁锤敲击窗户,观察其是否损坏
-
(2) 下列选项,不属于制定可旋转方案阶段的是( )A . 进行用户调查 B . 进行方案筛选 C . 确定设计要求 D . 分析材料成本
-
(3) “可内外旋转的窗户”创意的实现方法主要是( )A . 转动轴设计在窗户的中间位置 B . 改变了窗户的形状 C . 增加摆放植物功能 D . 改变了窗户的材料
在金工工艺中,用于攻丝的工具是。
如图所示是蔬菜大棚土壤湿度控制电路,湿度增大时湿敏电阻Rs阻值变小。当土壤湿度大于,上限时,水泵M不工作,低于下限且水箱中水位高于a点时,启动水泵加湿。下列关于该电路分析正确的是( )
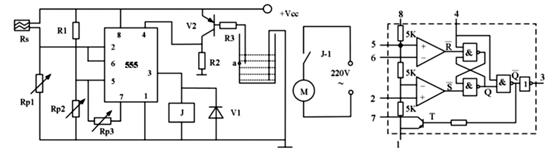
A . 调大Rp2,下限设定值提高,上限设定值降低
B . 调节Rp3,只改变上限设定值
C . Rp3虛焊,仍能实现湿度的区间控制
D . 测试时水泵始终不工作,可能是V2的集电极与发射极连焊
一种高档轿车的底盘能根据道路的情况自动升降,当行驶在平坦的公路上时,底盘能够降到最低,以降低重心,提高高速行驶时的稳定性,当行驶到路况较差的路面时,底盘能自动升高,以保证汽车底盘不与路面碰撞。这种特性表明该轿车具有良好的 ( )
A . 整体性
B . 相关性
C . 环境适应性
D . 动态性
在制作木质孔明锁构件的过程中,不需要用到的工具是( )
A . 直尺、木工锯
B . 角尺、木工锉
C . 木工凿、榔头
D . 钻床、样冲
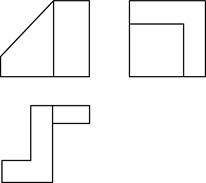
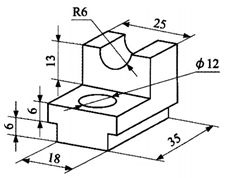
请补全三视图中所缺的三条图线
下列电路符号中,表示发光二极管的是( )
A . 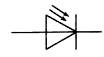 B .
B .  C .
C . 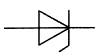 D .
D . 
B .
C .
D .
如图所示是已展开的嫦娥五号国旗展示系统。国旗材料为耐极端环境条件的国产高性能芳纶纤维,采用复合纺纱技术制作而成; 科研团队花费超过一年的时间,挑选出30多种纤维材料,通过做热匹配性,耐高低温、防静电、防月球尘埃等试验,经数理统计分析,选用芳纶纤维为主要材料。这种选择材料的试验方法属于( )
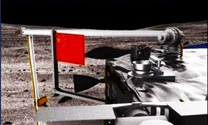
A . 优选试验法
B . 虚拟试验法
C . 强化试验法
D . 移植试验法
如图所示为一把10厘米的直尺,可以在没有外界辅助的情况下画出一根25厘米的直线。这把直尺附有一个滑动模块,画完第一条直线后,拇指摁住滑块,其他手指按住尺面并顺延移动,在保证两条线“无缝”对接前提下便可“无限制”地画下去,直至达到目的为止。从人机关系角度分析该直尺的设计,下列说法不正确的是( )


A . 可以快速画出长条直线,体现了高效目标
B . 滑动模块的大小和移动距离考虑了静态人和动态人
C . 尺子体积小巧,方便携带,满足普通人群的需要
D . 尺子有多种颜色可供选择,较好地实现了人机间的信息交互
如图是一款虚拟现实跑步机,使用者戴上VR头盔和相应装备沉浸在虚拟环境中,其锻炼效果是传统跑步机所无法比拟的。从技术的角度分析,以下说法中不正确的是( )

A . 虚拟现实跑步机成本高,体现了技术的两面性
B . 厂商需要支付一定的技术使用费,体现了技术的专利性
C . 先进的虚拟现实技术与传统跑步机相结合,体现了技术的创新性
D . 在虚拟环境中锻炼身体,提高锻炼效果,体现了技术的目的性
在集体办公条件下,办公室桌椅中间一般用挡板隔开,这种设计是为了满足( )
A . 人的心理需求
B . 人的生理需求
C . 动态人的要求
D . 信息交互
如图所示为某厂家用注塑机加工塑料餐盘的生产流程图。关于该流程图,以下说法合理的是( )
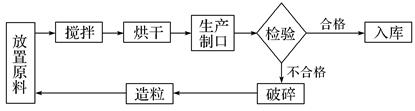
A . 经过检验的合格产品可直接入库
B . 流程存在并行的时序
C . 流程中“搅拌”和“烘干”环节的时序可颠倒
D . 不合格的产品不可再次利用
如图所示的温控电路,用Rp设定555芯片5脚的电位Vct。当温度超过60 ℃时散热风扇电机启动。下列分析中不正确的是( )
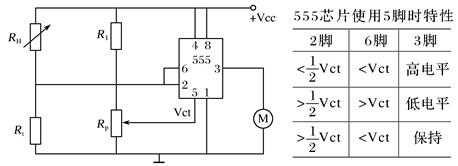
A . Rt应采用负温度系数的热敏电阻
B . 调大Rh的阻值,电机启动时的温度低于60 ℃
C . Rp的滑动触点向下移,电机启动时的温度高于60 ℃
D . 温度从60 ℃以上降低到60 ℃以下,电机就立即断电
如图所示椅子的尺寸中,不是从人机关系角度考虑的是( )

A . 36cm
B . 44cm
C . 42cm
D . 79cm
将钢块加工成形,下列加工工艺中为必要环节且工具选择合理的是( )
A . 划线:划针、划规和卷尺
B . 冲眼:样冲、铁锤和台虎钳
C . 钻孔:麻花钻和台虎钳
D . 锯割:手锯和平口钳
四轴无人机由飞控系统、气压定高控制系统及起落架自动收放系统等部分组成。其中,气压定高控制系统利用气压计测量空气压力,计算出无人机的高度,并与设定值进行比较,根据偏差值调整电机动力,使四轴无人机悬停于设定的高度;起落架自动收放系统检测到无人机飞行高度低于某一值时,控制单元控制伺服电机放下起落架。从控制的角度分析,下列说法不正确的是( )

A . 气压定高控制系统存在检测装置,据此判定该系统为闭环控制系统
B . 气压定高控制系统的执行器是电机
C . 起落架自动收放系统的控制方式属于开环控制
D . 控制单元的控制精度不属于起落架自动收放系统的干扰因素
最近更新
- 如图所示为卢瑟福发现质子的实验装置。M是显微镜,S是荧光屏,窗口F处装有银箔,氮气从阀门T充入,A是放射源.下列说法中正
- 已知函数,则的值为 ( ) A. -1 B.1 C.
- 下图为甲、乙、丙、丁四地工业生产的成本分析图(单位相同),读图完成20, 21题。20.某企业集团计划新建有色金属冶炼厂
- (黑龙江省哈师大附中2010届高三第二次月考)给下列一则新闻拟一个标题,要求在10个字以内。 新华网北京9月30日电(记
- 下列关于元素和化合物的叙述正确的是 () A.组成所有蛋白质和核酸
- 已知,则下列比例式成立的是 A. B. C. D.
- 微波武器 微波是一种高功率电磁波,可以用特殊的天线汇聚成方向性极强、能量极高的波束,在空中以光速沿直线
- 《十二铜表法》保留了许多原始的陈规陋习,如同态复仇,巫术惩罚,对债务人的残酷处置,禁止平民与贵族通婚等,这说明 A.此
- 动植物体的结构是有层次的,其中最小的结构层次是 A.细胞 B.组织 C.器官 D.系统
- 下列说法不正确的是 A、蓝藻细胞中含有藻蓝素和叶绿素,能进行光合作用,属于生产者 B、所有的细胞都只能由细胞分裂而来 C
- ---________? ---I’d like to buy a T-shirt for my father.A. H
- 《曹刿论战》(10分)十年春,齐师伐我,公将战。曹刿请见。其乡人曰:“肉食者谋之,又何间焉?”刿曰:“肉食者鄙,未能远谋
- 在阴极射线管中电子流方向由左向右,其上方置一根通有如右图所示电流的直导线,导线与阴极射线管平行.则阴极射线将( )
- 下列关于氧气的说法中错误的是 A.工业上可以利用分离液态空气法制氧气 B.所有的物质都能与氧气发生氧化反应
- 下列生物的功能与其结构相对应的是() A. 花粉萌 发形成花粉管,有利于传粉 B. 人体毛细血管的总面积可达6000米2
- 设,则的大小关系是( ) A. B. C. D.
- Our attitude toward our teachers should be _____, but not sl
- 阅读下面一段文言文,完成小题。 晏子使楚。楚人以晏子短,为小门于大门之侧而延晏子。晏子不入,曰:“使狗国者,从狗门
- 杜鹃将卵产在大山雀的巢内,靠大山雀孵卵和喂养幼鸟.这种现象是) A.杜鹃的繁殖行为 B.杜鹃的攻击行为 C.杜鹃的学
- 下列说法正确的是 A.元素的性质随着元素原子质量数的递增而呈周期性变化 B.元素的性质随着元素核电荷数的递增而呈周期性变



