一 控制的方式与应用 知识点题库
下列控制系统中属于自动控制系统的是( )
A . 按钮开关控制的台灯
B . 普通自来水龙头
C . 花房恒温控制系统
D . 汽车刹车控制系统
如图所示是一款家用全自动开盖垃圾桶。当人手靠近垃圾桶时,桶盖会自动打开,垃圾丢入后又会自动合上。此垃圾桶由红外传感器、微电脑控制芯片、电机传动机构等部件组成。下列关于自动开盖垃圾桶控制系统的说法正确的是( )
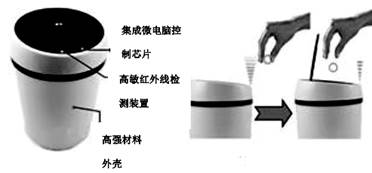
A . 因需要人手靠近时,桶盖才能打开,故此控制属于手动控制
B . 因需要检测到人体热辐射信号,桶盖才能打开,故被控对象是红外线传感器
C . 因系统有检测装置,故此控制系统属于闭环控制系统
D . 红外传感器检测的是输入量,此控制系统属于开环控制系统
如图所示为共享单车智能锁,是共享单车的核心部件。智能锁内置的IC控制芯片支持定位,支持二维码扫描和蓝牙连接方式开锁。使用时,手机APP扫描二维码识别锁的编号,并将编号传送给营运商服务器,服务器收到编号后,会把对应编号的锁密码同时发送到使用者的手机和智能锁内置的IC控制芯片上。当使用者通过蓝牙通信的方式实现密码匹配后,控制芯片可直接驱动电机开锁。请根据以上材料,完成下列各题。

-
(1) 该智能锁开锁控制系统的控制方式属于(在①开环控制;②闭环控制中选择合适的一项填写在横线处);
-
(2) 该智能锁开锁控制系统的执行器和被控对象分别是和(在①手机APP;②控制芯片;③电机;④服务器;⑤智能锁中选择合适的选项填写在横线处);
-
(3) IC控制芯片定位功能的作用是(在①计算使用者骑行时间;②确定共享单车的位置;③为使用者导航中选择合适的一项号填写在横线处);
-
(4) 密码匹配后,IC控制芯片可直接驱动电机开锁,体现了系统的(在①整体性;②相关性;③环境适应性中选择合适的一项填写在横线处);
-
(5) 为该智能锁补充电能的以下措施中最合理的是(在①在车轮上安装发电装置,骑行时为内置电池充电;②定期更换内置电池;③工作人员定期为其充电中选择合适的一项填写在横线处)。
如图所示是一款新型跑步机。电子控制器能够检测出跑步者的步速,然后发出命令,让电机相应地加速或减速转动,最终使传送带运动速度与跑步者的步速相匹配。对于该跑步机自动调速控制系统,以下说法正确的是( )

A . 输入量为设定的运动速度
B . 该控制系统为开环控制系统
C . 控制量是传送带速度
D . 被控对象是跑者
如图所示为某校学生设计制作的自动取汤机,能保持汤的温度在一定范围内。按下取汤按钮,就会自动落下一个碗,并放出一定量的汤在碗中。在该自动取汤机的温度控制系统中,不需要的器件是( )

A . 温度传感器
B . 加热器
C . 温度控制器
D . 定时器
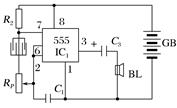
王明同学设计了如图所示的由555集成电路、覆铜板探头、喇叭、电位器、电阻、电容和电池等组成的雨水报警器。根据该控制系统回答以下问题。
-
(1) 该控制系统的工作方式为( )A . 闭环电子控制 B . 开环电子控制 C . 先闭环电子控制后开环电子控制 D . 先开环电子控制后闭环电子控制
-
(2) 在调试过程中,将水滴在覆铜板上,喇叭不发出声音,单独检测喇叭是好的,关于用多用电表检测的说法,错误的是( )A . 将RP调到最下端,2脚、6脚有电压,说明电容器C1是好的 B . 3脚有电压输出,说明电容器C3是好的 C . 7脚无电压,说明7脚未焊接好 D . 8脚无电压,说明8脚未焊接好
-
(3) 王明同学想把该报警器改装成防盗报警器,下列改装方案不合适的是( )A . 将覆铜板探头换成红外线感应装置来控制 B . 将覆铜板探头换成干簧管来控制 C . 将覆铜板探头换成压力触点来控制 D . 将覆铜板探头换成声音传感器来控制
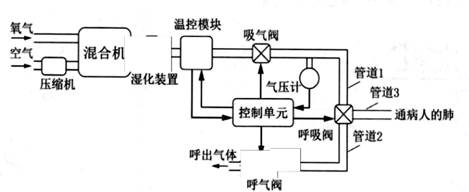
如图所示是某呼吸机系统的工作原理示意图。控制单元控制呼吸阀实现呼吸频率的调节。在吸气阶段,控制单元控制吸气阀的开合度将空气送入病人的肺内,肺内的压力增大使肺腔扩张,当肺内的压力达到预置值,关闭吸气阀,实现吸气功能。在呼气阶段,打开呼气阀,由于肺腔组织的弹性,将肺恢复到原来的形状,而使经过交换的一部分空气呼出体外,关闭呼气阀,实现呼气功能。请根据示意图及其描述完成问题。
-
(1) 从系统的角度分析,下列说法中不恰当的是( )A . 代替人的呼吸功能,体现了系统的目的性 B . 在吸气子系统中,吸气阀和呼吸阀由控制单元单独控制,它们之间没有关联 C . 经过一段时间的使用后,各个管道和阀门都需要消毒处理,体现了系统的动态性 D . 优化系统的吸气效果时,病人自身的肺功能属于约束条件
-
(2) 以下对吸气气压控制子系统的分析中,正确的是( )A . 吸气时,呼吸阀将管道2和管道3接通 B . 控制方式是开环控制 C . 控制量是流过吸气阀的空气流量 D . 气压计的灵敏度不影响控制精度
下图为汽车制动控制系统局部原理图。踩刹车时,通过油压传递力,推动活塞,使摩擦块与制动盘间的摩擦力增大,控制制动盘的速度,实现制动控制。以下关于该控制系统的分析不正确的是( )
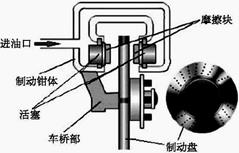
A . 该控制系统通过油压传递力,存在液压控制
B . 该控制系统的被控对象是活塞与摩擦块
C . 该控制系统的控制量是摩擦块与制动盘摩擦力的大小
D . 该控制系统是开环控制系统
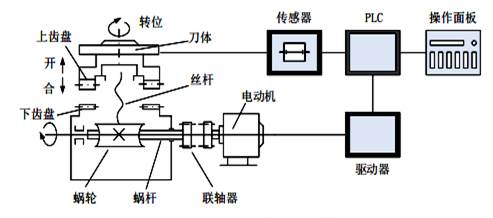
如图所示是数控车床电动刀架控制系统,工作人员通过操作面板输入刀体位置与控制程序,PLC控制模块根据控制信息与传感器检测到的刀体位置信号使驱动器发出相应的驱动信号驱动电机转动,从而带动蜗杆、蜗轮与丝杆运动,最终使刀体移动到设定位置。请根据示意图及其描述完成下面小题。
-
(1) 下列关于该控制系统的说法中不正确的是( )A . 该系统由蜗轮、蜗杆、丝杆等组成,体现了系统分析的综合性原则 B . 电动机根据程序转动,驱动蜗杆带动蜗轮与丝杆运动,体现了系统的相关性 C . 在工作温度过高时,该系统会自动停机,体现了系统的环境适应性 D . 蜗轮的磨损将影响刀体的控制精度
-
(2) 下列关于数控车床电动刀架控制系统的分析中正确是( )A . 控制量是刀体的实际位置 B . 控制器是电机 C . 被控对象是刀体 D . 该控制方式是开环控制
下列控制系统中,属于开环控制系统的是( )
A . 电冰箱的温度控制系统
B . 笔记本电脑CPU风扇的转速控制系统
C . 家用空调恒温控制系统
D . 红绿灯定时控制系统
走廊里的声控灯, 当人经过发出比较大的声音时, 灯就会亮, 过一段时间后就熄灭。该控制系统的控制手段和控制方式属于( )
A . 人工控制的开环控制系统
B . 人工控制的闭环控制系统
C . 自动控制的开环控制系统
D . 自动控制的闭环控制系统
如图所示是一款人脸自动识别签到系统,当人脸靠近一定距离时,摄像头上方的红外线感应器将侦测到的信号输入电路模块,电路模块控制摄像头拍照.当拍照完成后,签到系统自动进入待机状态.下列对该控制系统的分析中不正确的是( )

A . 该控制系统是开环控制系统
B . 输入量是人的红外线信号
C . 被控对象是人脸
D . 控制器是电路模块
如图所示是酒精浓度测试报警仪,气敏传感器将检测到的酒精浓度转化为电信号,传给单片机,单片机对所输入的信号进行分析处理.如果检测到酒精浓度超过设定值,蜂鸣器将发出声音报警.关于该报警控制系统,以下说法中不正确的是( )

A . 输出量是有无报警声
B . 被控对象是蜂鸣器
C . 控制器是单片机
D . 控制方式是闭环控制
手环具有来电提醒功能,其控制过程:当手机接收到来电信号时,手机上的APP就会发送震动指令,那么手环就会震动,提示佩戴者手机上有电话打进来。关于该手环来电提醒控制系统,下列分析不正确的是( )
A . 该控制方式为开环控制
B . 环境中的高频电磁波可能是该控制系统的干扰因素
C . 输入量为手机接收到的来电信号
D . 被控对象为手环
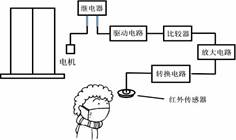
如图所示是一款红外测温门禁系统的工作原理图。当红外传感器监测到人的体温信号,通过转换电路、放大电路,与预设值进行比较。当人的体温低于37.3度时,驱动电路打开继电器的开关,进而控制电机打开大门。从控制角度分析,下列说法正确的是( )
A . 该控制系统的输入量是被检测的人
B . 人没有站到指定位置,是该控制系统的干扰因素
C . 该系统存在比较器,但是是开环控制系统
D . 该系统通过对人的体温进行检测,并与预设值比较,是闭环控制系统
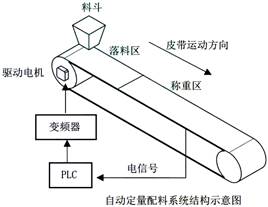
如图所示是自动定量配料结构系统示意图。控制过程如下:自动定量配料系统通电后,料斗中的物料匀速落在落料区,驱动电机开始旋转,经皮带运送到称重区,称重传感器根据受力的大小输出一个电信号,可编程控制器(PLC)将此信号与设定值进行比较,调节运算后,通过变频器控制驱动电机的转速,使皮带每分钟输出的物料重量达到设定要求,完成自动定量配料过程。从控制系统的角度,下列关于该自动定量配料系统的说法中正确的是( )
A . 该系统的控制方式为开环控制
B . 控制量是驱动电机的转速
C . 输入量是称重区上物料的重量
D . 执行器是变频器
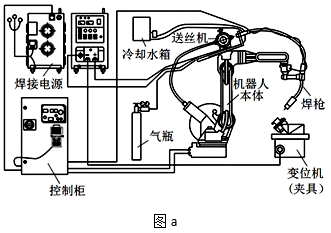
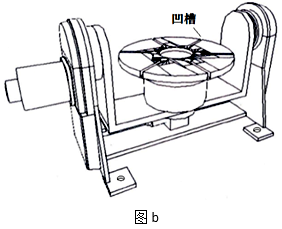
如图a所示为焊接机器人系统,主要包括控制柜、机器人本体及焊接设备三部分。焊接机器人的基本工作原理是示教再现,即由用户导引机器人,一步步按实际任务操作一遍,机器人在导引过程中自动记忆示教的每个动作的位置、姿态、运动参数、焊接参数等,并自动生成一个连续执行全部操作的程序。之后机器人可以准确地按示教动作完成操作任务。请根据示意图和描述,完成以下任务。
-
(1) 焊接机器人可以通过示教掌握焊接操作,能完成工件上需要的焊接任务,该系统的控制方式属于(在“A .开环控制;B .闭环控制”中选择合适的选项,将序号填入横线处);
-
(2) 设计焊接机器人时,应该先设定总体要求,然后分成控制柜、机器人本体及焊接设备几部分分别进行设计,体现了系统分析的(在“A .整体性原则;B .科学性原则;C .综合性原则”中选择合适的选项,将序号填入横线处);
-
(3) 焊接机器人在实际操作中出现了焊缝偏移,下列不属于该控制系统干扰因素的是(在“A .工作电压不稳定;B .示教时不够精确;C .变位机动作有偏差”中选择合适的选项,将序号填入横线处);
-
(4) 为了使焊接的方位更灵活,除了机械手末端(焊枪)能转动之外,放置被焊工件的平台也会转动,这样的平台称为变位机。如图b所示是一种变位机,根据示意图,被焊机件放在工作台上不可以实现(在“A .水平旋转;B .竖直旋转;C .在倾斜面上旋转;D .水平移动”中选择合适的选项,将序号填入横线处);
-
(5) 变位机圆形平台上设计的凹槽是为了利用螺帽和螺栓固定夹具(夹持被焊工件),以下是四种凹槽结构的横截面示意图,其中不合理的是 (在下列选项中选择合适的选项,将序号填入横线处);A .
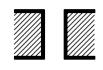 B .
B .  C .
C . 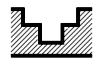 D .
D . 
-
(6) 焊接机器人可以准确地按示教动作完成焊接任务,运用了控制中的方法。(在“A .系统分析;B .黑箱;C .功能模拟;D .虚拟试验”中选择合适的选项,将序号填入横线处);
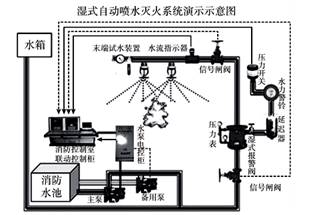
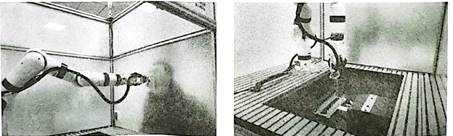
如图所示的是湿式自动喷水灭火系统演示示意图,其工作原理是:保护区域内发生火灾时,温度升高使闭式喷头玻璃球炸裂而使喷头开启喷水。这时湿式报警阀系统侧压力降低,供水压力大于系统侧压力(产生压差),使阀瓣打开(湿式报警阀开启) ,其中一路压力水流向洒水喷头,对保护区洒水灭火,同时水流指示器报告起火区域;另一路压力水通过延迟器(延迟器是为了防止由于系统漏水等原因导致的水力警铃误报,当压力波动较大时会起缓冲及延迟作用,避免误报警)流向水力警铃,发出持续铃声报警,同时压力开关输出启动供水泵信号,完成系统启动。系统启动后,由供水泵向开放的喷头供水,开放喷头按不低于设计规定的喷水强度均匀喷水,实施灭火,流程图如图所示。请根据示意图和描述,完成以下问题:
-
(1) 该系统的控制方式属于(在“A .开环控制;B .闭环控制”中选择合适的选项,将序号填入横线处);
-
(2) 设计该系统时,既要考虑延迟器的精度,又要考虑水力警铃的音量,体现了系统分析的(在“A .整体性原则;B .综合性原则;C .科学性原则”中选择合适的选项,将序号填入横线处);
-
(3) 湿式报警阀安装时不需要考虑的因素是(在“A .压力表的精度;B .保护区洒水的范围;C .湿式报警阀的安装位置;D .喷头的大小”中选择合适的选项,将序号填入横线处)
-
(4) 为提高铃声报警的准确性,现需要安装一个水压传感器,其安装位置合理的是(在“A .压力表与湿式报警阀之间;B .湿式报警阀与延迟器之间”中选择合适的选项,将序号填入横线处);
-
(5) 为了优化湿式自动喷水灭火系统,下列措施中不合理的是(在“A .去掉延迟器加快反应警铃速度;B .将喷头直径加大;C .将闭式喷头玻璃球改为温度传感器”中选择合适的选项,将序号填入横线处);
如图所示为咽拭子采样机器人。研发团队围绕采样过程的每个环节,设计了相应的消毒装置、咽拭子安放装置、末端执行器、采集装置等。用户扫描二维码,机器人就会放下一次性咬口器。咬住咬口器,按下启动按键,机器人会自行将棉签捅入喉咙并刮擦。视觉识别系统从侧面识别棉签后端标志,判断并通过显示面板和广播告知是否为有效采集。采集好后,收样、封装、保存、消杀,这套“自助式”核酸采样仅用时42秒就完成了。自主采样机一次采集可获取四个有效部位样本,以确保采集到上皮细胞。
-
(1) 下列关于咽拭子采样机器人采样系统的分析中,不恰当的是( )A . 仅用时42秒就能完成核酸采样,体现了系统的目的性 B . 能够在0-40℃环境平 稳运行,采样有效率100%,体现了系统的环境适应性 C . 由消毒装置、咽拭子安放装置、末端执行器、采集装置等组成,体现了系统的整体性 D . 采样者的口腔深度各异,提供不同长度且有后部识别标志的棉签,体现了系统的相关性
-
(2) 下列关于采集告知子系统的分析中,不恰当的是( )A . 该系统属于开环控制系统 B . 被控对象是采样者 C . 视觉识别系统识别的棉签后端标志是输入量 D . 显示面板和广播告知是否为有效采集是输出量
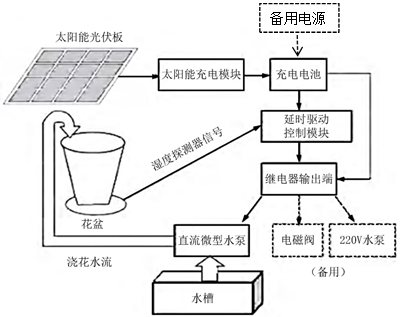
如图所示为某学生设计的太阳能花盆湿度控制系统,当花盆湿度低于最小值时,控制模块发出浇水指令,水泵出水;当湿度高于最大值时,水泵停止浇水。请根据示意图和描述,完成以下任务:
-
(1) 该控制系统属于(A .开环控制系统;B .闭环控制系统),控制手段是(A .人工控制; B .自动控制);
-
(2) “风吹日晒”属于湿度控制的(A .干扰因素;B .影响因素;C .约束条件);
-
(3) 长时间阴雨天气,系统需要启动备用电源充电,这主要考虑了因素(A .物;B .人;C .环境);
-
(4) 要提高湿度控制系统的精准度,以下措施不可行的是 (A .提高传感器的灵敏度;B .提高控制模块的控制精度;C .提高水泵的额定功率);
-
(5) 设计系统时,要根据充电电池的容量,选择合适的太阳能光伏板,体现系统的(A .动态性;B .相关性;C .环境适应性;D .目的性;E .整体性)。
最近更新
- 2009年2月28日,十一届全国人大常委会第七次会议表决通过了《中华人民共和国食品安全法》。这部法律自2009年6月1目
- 已知α+β=,且α、β满足关系式(tanαtanβ+a)+2tanα+3tanβ=0,则tanα=___________
- 近代一有识之士曾说:“一国所得,诸国安然而享之;一国所求,诸国群起而助之,是不啻驱西洋诸国,使之协以谋我。”上述言论针对
- 下列各项中,没有错别字的一项是() A.寥落 桀骜锋利 碟血 流金铄石 B.陪衬 耳根清静 严厉 秋蝉嘶叫 C.落
- ——I’ve nothingon me except this ten yuan to donate, I’m afra
- 血液循环的动力器官是( )A.心脏B.肺C.肝脏D.动脉
- (08年四川卷)(14分)某固体混合物可能含有MgCO3、Al2(SO4)3、Na2SO4、Ba(NO3)2、AgNO3
- 火车票价格上涨会引起飞机运输量的增加,因为,对于消费者来说,火车和飞机是 A. 用途没有差别 B. 互为替
- 在实验室不宜长期保存,应现用现配的是 ①溴水 ②银氨溶液 ③石灰水 ④氯水 ⑤氢硫酸 ⑥氢氧化钠溶液 ⑦硫酸亚铁溶液 ⑧
- 2008年上半年,为控制CPI的过快上涨,政府运用了税收、利率等经济杠杆,物价回落,宏观调控成效显著。经济杠杆能够起到调
- 环己烯可以通过丁二烯与乙烯发生加成反应得到: CH2=CH—CH=CH2+CH2=CH2(也可表示为:)实验证明,下列反
- 下图为人体在某项生理过程中,所发生的化学反应的示意图,据图回答问题:(1)图中标有字母的物质中,________代表酶,
- 人类历史发生了重大转折。欧洲资本主义产生,世界各地的联系开始日益加强。下边两个图案有着相同的设计理念。这种理念与下列哪一
- 在柏拉图看来,要成为政治家、立法者,最好先去学习 A.哲学 B.法律 C.军事 D.历史
- 右图中所有物质均为初中化学中的常见物质,且它们转化关系如图所示 (“→”表示能生成)。据图回答:
- 在AB两点放置的是等量同种正点电荷,O为AB连线中点,相当圆周的圆心.圆周上其它位置CDEFGH 关于0对称.则
- 两只一模一样的小花狗,站在不同的哈哈镜前,于是,一个“高大”起来,从此自命不凡,神气活现;另一个呢?畏首畏尾,自惭形秽。
- 如图所示,已知直线a与b不共面,直线c∩a=M,直线b∩c=N,又a∩平面α=A,b∩平面α=B,c∩平面α=C,求证:
- 下列除杂方法正确的是A.用硫酸铜溶液除去铁粉中混有的铜粉B.用稀硫酸除去氯化钠中混有的碳酸钠C.用碳酸钙除去氯化钙溶液中
- 2009年某企业生产A商品200万件,价值总量为2200万元;2010年该企业通过技术革新,劳动生产率提高25%,并推动



