第2节 弹性形变与范性形变 知识点题库
-
(1) 下列说法正确的是( )A . 在同一地点,单摆做简谐振动的周期的平方与其摆长成正比 B . 弹簧振子做简谐振动时,振动系统的势能与动能之和保持不变 C . 在同一地点,当摆长不变时,摆球质量越大,单摆做简谐振动的周期越小 D . 系统做稳定的受迫振动时,系统振动的频率等于周期性驱动力的频率 E . 已知弹簧振子初始时刻的位置及其振动周期,就可知振子在任意时刻运动速度的方向
-
(2)
如图,半径为R的半球形玻璃体置于水平桌面上,半球的上表面水平,球面与桌面相切于A点。一细束单色光经球心O从空气中摄入玻璃体内(入射面即纸面),入射角为45°,出射光线射在桌面上B点处。测得AN之间的距离为
 .现将入射光束在纸面内向左平移,求射入玻璃体的光线在球面上恰好发生全反射时,光束在上表面的入射点到O点的距离。不考虑光线在玻璃体内的多次反射。
.现将入射光束在纸面内向左平移,求射入玻璃体的光线在球面上恰好发生全反射时,光束在上表面的入射点到O点的距离。不考虑光线在玻璃体内的多次反射。

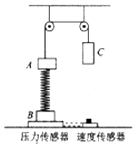
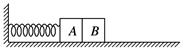
A、B是质量均为m的小物块,C是质量为M的重物,A、B间由轻弹簧相连.A、C间由轻绳相连.在物块B下放置一压力传感器,重物C下放置一速度传感器,压力传感器与速度传感器相连.当压力传感器示数为零时,就触发速度传感器测定此时重物C的速度.整个实验中个弹簧均处于弹性限度内,重力加速度为g.实验操作如下:
(I)开始时,系统在外力作用下保持静止,细绳拉直但张力为零.现释放C,使其向下运动,当压力传感器示数为零时,触发速度传感器测出C的速度为v.
(II)在实验中保持A、B质量不变,改变C的质量M,多次重复第(1)步.
①该实验中,M和m大小关系必须满足Mm(选题“小于”、“等于”或“大于”).
②为便于研究速度v与质量M的关系,每次测重物的速度时,其已下降的高度应(选填“相同”或“不同”).
③根据所测数据,为得到线性关系图线,应作出(选填“v2﹣M”、“v2﹣”或“v2﹣”)图线.
④根据③问的图线知,图线在纵轴上截距为b,则弹簧的劲度系数为(用题中给的已知量表示).
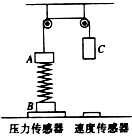
(I)开始时,系统在外力作用下保持静止,细绳拉直但张力为零.现释放C,使其向下运动,当压力传感器示数为零时,触发速度传感器测出C的速度为v.
(II)在实验中保持A,B质量不变,改变C的质量M,多次重复第(1)步.
①该实验中,M和m大小关系必需满足Mm(选填“小于”、“等于”或“大于”).
②为便于研究速度v与质量M的关系,每次测重物的速度时,其已下降的高度应(选填“相同”或“不同”).
③根据所测数据,为得到线性关系图线,应作出(选填“v2﹣M”、“v2﹣  ”或“v2﹣
”或“v2﹣  ”)图线.
”)图线.
④根据③问的图线知,图线在纵轴上截距为b,则弹簧的劲度系数为(用题给的已知量表示).

-
(1) 弹簧的最大弹性势能;
-
(2) 小车最后的速度v;
-
(3) 滑块Q与车相对静止时Q到桌边的距离.

 C . B能达到的最大高度为
C . B能达到的最大高度为  D . B能达到的最大高度为
D . B能达到的最大高度为 
![]()
-
(1) 当弹簧被压缩到最短时,A球的速度;
-
(2) 弹簧的最大弹性势能;
-
(3) 弹簧再次恢复原长时,A、B两球的速度.
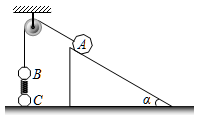
 C . 斜面倾角α=45°
D . 从释放A到C刚离开地面的过程中,A,B两小球组成的系统机械能守恒
C . 斜面倾角α=45°
D . 从释放A到C刚离开地面的过程中,A,B两小球组成的系统机械能守恒

 、
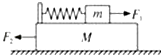
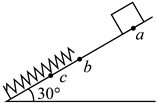
、  的两小物块中间连接有劲度系数
的两小物块中间连接有劲度系数  的轻质弹簧(与物块栓接),整个装置放在倾角为
的轻质弹簧(与物块栓接),整个装置放在倾角为  的光滑斜面上,斜面底端有固定挡板。对物块A施加一个沿斜面向下的、大小
的光滑斜面上,斜面底端有固定挡板。对物块A施加一个沿斜面向下的、大小  的力,整个装置处于静止状态。现撤去外力F,g取
的力,整个装置处于静止状态。现撤去外力F,g取  ,则( )
,则( ) 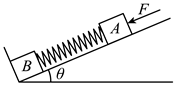
 B . 当物块B与挡板刚要分离时,物块A克服重力做功为
B . 当物块B与挡板刚要分离时,物块A克服重力做功为  C . 物块B离开挡板前,弹簧一直对物块A做正功
D . 弹簧恢复到原长时,物块A的动能最大
C . 物块B离开挡板前,弹簧一直对物块A做正功
D . 弹簧恢复到原长时,物块A的动能最大
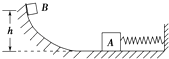
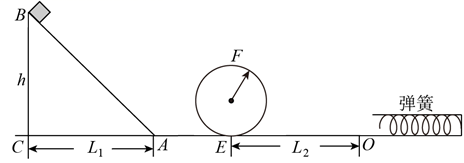
 的小物块在A处压缩一轻质弹簧,弹簧与小球不拴接。用手挡住小物块不动,此时弹簧弹性势能
的小物块在A处压缩一轻质弹簧,弹簧与小球不拴接。用手挡住小物块不动,此时弹簧弹性势能  ,放手后小物块向右运动脱离弹簧,沿倾斜轨道向上运动到最高点C,已知C点离水平轨道的高度
,放手后小物块向右运动脱离弹簧,沿倾斜轨道向上运动到最高点C,已知C点离水平轨道的高度  ,斜面轨道的倾斜角度为
,斜面轨道的倾斜角度为  ,不计空气阻力及小物块经过B点的机械能损失,g取 。求:
,不计空气阻力及小物块经过B点的机械能损失,g取 。求: 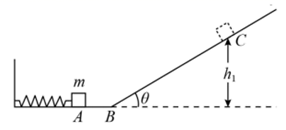
-
(1) 小物块脱离弹簧时的速度大小
 ;
;
-
(2) 小物块与粗糙倾斜轨道间的动摩擦因数
 ;
;
-
(3) 小物块第二次滚上斜面的最大高度

 ,cos37° =
,cos37° =  。求:
。求: 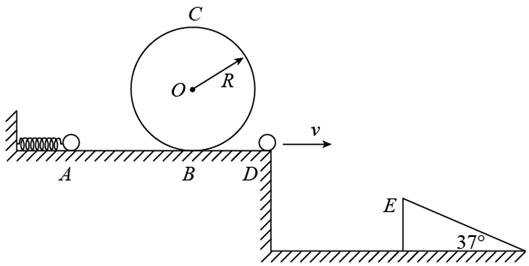
-
(1) 压缩弹簧至A点的弹性势能Ep;
-
(2) D点到E点的水平距离x;
-
(3) 当小球2水平抛出的速度v =
 时,小球2的质量m2。
时,小球2的质量m2。
 分别与水平轨道
分别与水平轨道  和
和  相连)、斜轨道
相连)、斜轨道  组成,各部分平滑连接。游戏时,滑块从斜轨道 端点
组成,各部分平滑连接。游戏时,滑块从斜轨道 端点  由静止释放,沿斜轨道下滑经过圆轨道后压缩弹簧,然后被弹出,再次经过圆轨道并滑上斜轨道,循环往复。已知圆轨道半径
由静止释放,沿斜轨道下滑经过圆轨道后压缩弹簧,然后被弹出,再次经过圆轨道并滑上斜轨道,循环往复。已知圆轨道半径  ,滑块质量
,滑块质量  且可视为质点,
且可视为质点,  长
长  , 长
, 长  ,滑块与
,滑块与  之间的动摩擦因数
之间的动摩擦因数  ,滑块与其它轨道摩擦及空气阻力忽略不计,
,滑块与其它轨道摩擦及空气阻力忽略不计,  取
取  。若某次游戏时释放点 距地面高度为
。若某次游戏时释放点 距地面高度为  。
。 
-
(1) 求滑块第一次通过最高点
 时对轨道的压力;
时对轨道的压力;
-
(2) 求弹簧获得的最大弹性势能
 ;
;
-
(3) 通过计算分析滑块是否会脱离轨道,若脱离轨道,请求出脱离轨道时距离地面的高度,若不脱离轨道,请确定出滑块最终停止的位置。
 的光滑斜面(固定)上方的
的光滑斜面(固定)上方的  点, 点到斜面的距离
点, 点到斜面的距离  等于弹簧的原长
等于弹簧的原长  ,弹簧另一端与小滑块(可视为质点)连接。在斜面上移动滑块至
,弹簧另一端与小滑块(可视为质点)连接。在斜面上移动滑块至  点,使弹簧处于水平状态。现将滑块从 点由静止释放,滑块沿斜面运动到 点正下方
点,使弹簧处于水平状态。现将滑块从 点由静止释放,滑块沿斜面运动到 点正下方  点,该过程中弹簧始终在弹性限度内。重力加速度大小为 。下列说法正确的是( )
点,该过程中弹簧始终在弹性限度内。重力加速度大小为 。下列说法正确的是( ) 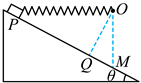
 点时的加速度为
点时的加速度为  B . 滑块经过 点时的速度大于
B . 滑块经过 点时的速度大于  C . 滑块经过 点时的速度最大
D . 滑块从 点运动到 点过程中动能的增量比从 点运动到 点过程中动能的增量小
C . 滑块经过 点时的速度最大
D . 滑块从 点运动到 点过程中动能的增量比从 点运动到 点过程中动能的增量小
 ,一质量
,一质量  的小滑块(可视为质点)将弹簧压缩至A点后由静止释放,经过B点后恰能通过最高点C作平抛运动。已知小滑块与轨道AB间的动摩擦因数
的小滑块(可视为质点)将弹簧压缩至A点后由静止释放,经过B点后恰能通过最高点C作平抛运动。已知小滑块与轨道AB间的动摩擦因数  ,AB的长度L=2m,g=10m/s2。
,AB的长度L=2m,g=10m/s2。 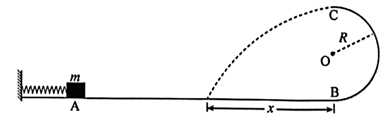
-
(1) 求小滑块通过最高点C时速度
 的大小;
的大小;
-
(2) 求弹簧压缩至A点时弹簧的弹性势能
 ;
;
-
(3) 保持(2)中的弹性势能不变,仅减小半圆形轨道半径的大小,则轨道半径多大时小滑块从最高点C飞出后的水平位移x最大,x最大值为多少?
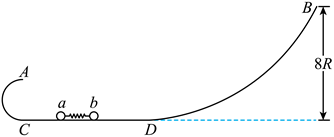
 的光滑半圆轨道
的光滑半圆轨道  与高
与高  的粗糙圆弧轨道
的粗糙圆弧轨道  (小于四分之一弧长)由一条光滑水平轨道平滑连接。在水平轨道上,轻质弹簧被a、b两小球挤压(不连接),处于静止状态。同时释放两个小球,弹簧的弹性势能全部转化为a、b两小球的动能,且a球恰好能通过半圆轨道最高点A,b球恰好能到达粗糙圆弧轨道最高点B。已知a球质量为
(小于四分之一弧长)由一条光滑水平轨道平滑连接。在水平轨道上,轻质弹簧被a、b两小球挤压(不连接),处于静止状态。同时释放两个小球,弹簧的弹性势能全部转化为a、b两小球的动能,且a球恰好能通过半圆轨道最高点A,b球恰好能到达粗糙圆弧轨道最高点B。已知a球质量为  ,b球质量为
,b球质量为  ,求:(g取
,求:(g取  )
) 
-
(1) a球经过半圆轨道的C点时对轨道的作用力

-
(2) b球经过D点时的速度大小

-
(3) 释放小球前弹簧的弹性势能
 J
B . 弹簧的最大弹性势能为
J
B . 弹簧的最大弹性势能为  J
C . 从c点到b点弹簧的弹力对滑块做的功为
J
C . 从c点到b点弹簧的弹力对滑块做的功为  J
D . 从a点到第二次到达b点的过程中滑块和弹簧组成的系统损失的机械能为 J
J
D . 从a点到第二次到达b点的过程中滑块和弹簧组成的系统损失的机械能为 J
- 下列关于种群、群落和生态系统的叙述中,正确的是 ①气候、食物、天敌和传染病都将影响到大熊猫的种群密度 ②在弃耕农
- 如图所示,将一矩形花坛ABCD扩建成一个更大的矩形花园AMPN,要求B在AM上,D在AN上,且对角线MN过C点,已知|A
- 清朝学者万斯大说:“古之时,诸侯之嫡长子为世子,嗣为诸侯;其余支庶之后,族类繁多,惧其散而无统也,因制为大宗小宗之法。”
- 将铁屑溶于过量盐酸后,再加入下列物质,会有三价铁生成的是( ) A.硫酸 B.氯水 C.硝酸锌
- 老王是一位农民,承包村里的土地种果树,年收入3万。家闲炒股收入也能有2万元,老王的儿子在一家私营企业上班,月收入4000
- 2009年3月1日16时13分10秒, 卫星在北京航天飞行控制中心科技人员的精确控制下,准确受控撞击在月球东
- 央视6月4日发布的《2012年中国环境状况公报》中指出,中国地表水总体轻度污染,爱护水资源刻不容缓. (1)下列做法不会
- 一位中学生准备写一篇有关“明清时期君主专制强化对中国社会发展影响”的历史小论文,下列观点中符合这—要求的有( )
- 指数函数(>0且≠1)的图像如图所示,那么不等式的解集为A. B.(0,4)
- 如图为某同学在研究离体小鼠肝脏细胞物质输入和输出时所作的曲线图,下列分析不正确的是() A. 如果横坐标代表时间,则纵坐
- 如图所示,等体积的甲乙两集气瓶内充满空气,燃烧匙内分别盛有过量的红磷和碳,点燃使其充分反应,冷却至室温,打开止水夹,出的
- 函数y=log2(x+1)的定义域A=.
- CaC2和ZnC2、Al4C3、Mg2C3、Li2C2等都同属离子型碳化物,请通过对CaC2制C2H2的反应进行思考,从
- 在公差为2的等差数列中,如果前17项和为,那么的值为 A.2 B
- 对于图中标记的各角,下列条件通过推理能够得到∥的是() A.∠1=∠2 B. ∠2=∠4
- 在制作洋葱表皮细胞和人口腔上皮细胞的临时装片时,在载玻片中央所滴加的液体分别是( ) A.生理盐水、生理盐水
- 皇权和相权的矛盾是我国封建社会统治阶级内部矛盾之一。下列举措为分割相权的是:( )①秦设御史大夫②唐设三省六部③北
- 在△ABC中,若,且,边上的高为,求角的大小与边的长
- 某人因为交通事故导致脊髓胸部折断、大脑皮层语言中枢H区受损,会出现的现象是 A.听觉丧失而听不懂他人讲话
- 若不等式组表示的平面区域是一个三角形,则的取值范围是 A. B. C. D.或



