7.动能和动能定理 知识点题库
静止在粗糙水平面上的物块,受方向相同但大小先后为F1、F2、F3的水平拉力作用,先做匀加速运动、再匀速运动、最后做匀减速运动到停下(F1 , F2 , F3分别对应上述三个过程)。已知这三个力的作用时间相等,物块与水平面间的动摩擦因数处处相同,则下列说法中正确的有( )
A . 这三个力中,F2做功最多
B . 加速运动过程中合力做的功大于减速运动过程中克服合力做的功
C . 这三个力中,F1做功最多
D . 在全过程中,这三个力做的总功为零
如图甲所示,在升降机的顶部安装了一个能够显示拉力的传感器,传感器下方挂上一轻质弹簧,弹簧下端挂一质量为m的小球,若升降机在运行过程中突然停止,并以此时为零时刻,在后面一段时间内传感器显示弹簧弹力F随时间t变化的图象如图所示,g为重力加速度,则下列说法正确的是( ) 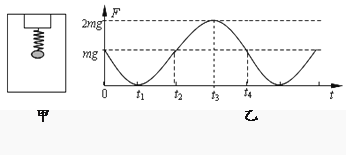
A . 升降机停止前在向上运动
B . 0~t1时间小球处于失重状态,t1~t2时间小球处于超重状态
C . t1~t3时间小球向下运动,动能先减小后增大
D . t3~t4时间弹簧弹性势能变化量小于小球动能变化量
某人站在离地面h=10m高处的平台上以速度v0=5m/s水平抛出一个质量m=1kg的小球,不计空气阻力,g取10m/s2 . 问:
-
(1) 人对小球做了多少功?
-
(2) 小球落地时的速度为多大?
某正电荷在移动过程中,电场力做正功,该电荷的电势能(选填“增加”或“减少”);某负电荷在移动过程中,电场力做负功,电荷的电势能(选填“增加”或“减少”).
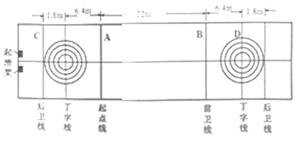
如图所示是冬奥会项目冰壶比赛场地示意图,左侧是投掷区域,起点靠近挡板处固定有起滑架,供掷壶的运动员蹬踏之用,右侧大本营。比赛时,我国队员在场上交流用时间代表掷冰壶的力度,例如说“10s”、“12s”“13s”等,那指的是冰壶在起点线A和前卫线B之间运动所用的时间,冰壶与冰面的动摩擦因数μ=0.015,g=10ms2
-
(1) 运动员不做擦冰等人为干预的动作,冰壶从起点线A沿直线前进不与其他冰壶碰撞,冰壶可以停在大本营的丁字线D处,请估算这种情况冰壶离开起点线A到前卫线B之间所用的时间t(保留小数点后面一位)
-
(2) 已知冰壶的质量为20kg,冰壶是从投掷区的后卫线C由静止开始运动,到起点线A处被释放,最终停止在大本营的丁字线处,则运动员对冰壶做了多少功?
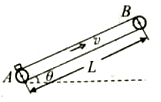
如图所示,与水平面成θ角的传送带,在电动机的带动下以恒定的速率顺时针运行.现将质量为m的小物块从传送带下端A点无初速地放到传送带上,经时间t1物块与传送带达到共同速度,再经时间t2物块到达传送带的上端B点,已知A、B间的距离为L,重力加速度为g,则在物块从A运动到B的过程中,以下说法正确的是( )
A . 在t1时间内摩擦力对物块做的功等于  mv2
B . 在t1时间内物块和传送带间因摩擦而产生的内能等于物块机械能的增加量
C . 在t1+ t2时间内传送带对物块做的功等于mgL sinθ+ mv2
D . 在t1+t2时间内因运送物块,电动机至少多消耗 mgLsinθ+mv2的电能
mv2
B . 在t1时间内物块和传送带间因摩擦而产生的内能等于物块机械能的增加量
C . 在t1+ t2时间内传送带对物块做的功等于mgL sinθ+ mv2
D . 在t1+t2时间内因运送物块,电动机至少多消耗 mgLsinθ+mv2的电能
mv2
B . 在t1时间内物块和传送带间因摩擦而产生的内能等于物块机械能的增加量
C . 在t1+ t2时间内传送带对物块做的功等于mgL sinθ+ mv2
D . 在t1+t2时间内因运送物块,电动机至少多消耗 mgLsinθ+mv2的电能
如图,一个质量为m的刚性圆环套在粗糙的竖直固定细杆上,圆环的直径略大于细杆的直径,圆环的两边与两个完全相同的轻质弹簧的一端相连,轻质弹簧的另一端相连在和圆环同一高度的墙壁上的P、Q两点处,弹簧的劲度系数为k,开始时圆环处于O点,弹簧处于原长状态且原长为l,细杆上的A、B两点到O点的距离都为l,将圆环拉至A点由静止释放,重力加速度为g,对于圆环从A点运动到B点的过程中,下列说法正确的是( )
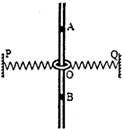
A . 圆环通过O点的加速度小于g
B . 圆环与两弹簧组成的系统机械能不守恒
C . 圆环在O点的速度为  D . 圆环在B点的速度为2
D . 圆环在B点的速度为2
D . 圆环在B点的速度为2
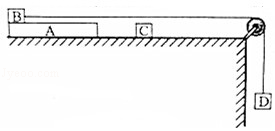
如图所示,光滑的水平桌面边缘处固定一轻质定滑轮,A为质量为2m的足够长的木板,B、C、D为三个质量均为m的可视为质点的物块,B放在A上,B通过水平且不可伸长的轻绳跨过定滑轮与D连接,D悬在空中,C静止在水平桌面上A的右方某处(A、C和滑轮在同一直线上)。A、B间存在摩擦力,且认为最大静摩擦力与滑动摩擦力相等,在D的牵引下,A和B由静止开始一起向右加速运动,一段时间后A与C发生时间极短的弹性碰撞,设A和C到定滑轮的距离足够远,D离地面足够高,不计滑轮摩擦,已知重力加速度为g。
-
(1) 为使A与C碰前A和B能相对静止一起加速运动,求A与B间的动摩擦因数μ应满足的条件;
-
(2) 若A与B间的动摩擦因数μ=0.75,A与C碰撞前A速度大小为v0 , 求A与C碰后,当A与B刚好相对静止时,C与A右端的距离。
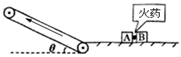
如图所示,可视为质点的滑块A、B静止在光滑水平地面上,A、B滑块的质量分别为mA=1kg,mB=3kg。在水平地面左侧有倾角θ=37°的粗糙传送带,以v=2m/s的速率逆时针匀速转动,传送带与光滑水平面通过半径可忽略的光滑小圆弧平滑连接,A、B两滑块间夹着质量可忽略的火药,现点燃火药爆炸瞬间,滑块A以6m/s的速度水平向左冲出,接着沿传送带向上运动,已知滑块A与传送带间的动摩擦因数为μ=0.25,传送带与水平面均足够长,重力加速度g取10m/s2 , sin37°=0.6,cos37°=0.8,求:
-
(1) 点燃火药爆炸后,B滑块获得的速度大小;
-
(2) 滑块A沿传送带上滑的最大距离;
-
(3) 若滑块A滑下后与滑块B相碰并粘住,求A、B碰撞过程中损失的机械能
 ;
;
-
(4) 求滑块A与传送带接触过程中因摩擦产生的热量Q。
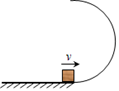
如图,半圆形光滑轨道固定在水平地面上,半圆的直径与地面垂直,一小物块以速度v从轨道下端滑入轨道,并恰能从轨道上端水平飞出,则轨道半径为(重力加速度为g)( )
A .  B .
B .  C .
C .  D .
D . 
B .
C .
D .
第24届冬季奥利匹克运动会将于2022年在北京举行,高山滑雪是冬奥会的一个比赛项目,因速度快、惊险刺激而深受观众喜爱。在一段时间内,运动员始终以如图所示的姿态加速下滑。已知运动员在下滑过程中受到阻力作用,则在这段时间内运动员的( )

A . 动能增加
B . 动能减少
C . 重力势能减少
D . 机械能不变
如图所示,原长为L1的橡皮绳与长为L2的细棉绳的一端都固定在O点,另一端分别系两个相同的小球P和Q,L1<L2 . 现将两绳都拉直,处于水平位置,且恰好都没有拉力,然后由静止释放.当橡皮绳和细棉绳各自第一次摆至O点正下方M点时,橡皮条和细棉绳的长度均为L2 . 不计空气阻力和橡皮条与细棉绳的质量.下列判断正确的是:( )
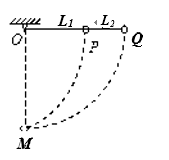
A . 两小球第一次通过O点正下方时的机械能相同
B . Q球通过M点时的动能较大
C . P球通过M点时的速度较大
D . 上述过程橡皮绳和细棉绳对小球都不做功
如图所示,两条相距  的平行金属导轨固定在水平面上,其右端接一阻值为
的平行金属导轨固定在水平面上,其右端接一阻值为  的电阻。质量为
的电阻。质量为  的金属杆
的金属杆  静置在导轨上,其左侧的矩形匀强磁场区域
静置在导轨上,其左侧的矩形匀强磁场区域  的磁感应强度大小为
的磁感应强度大小为  方向竖直向下,当该磁场区域以速度
方向竖直向下,当该磁场区域以速度  匀速地向右扫过金属杆后,金属杆的速度变为
匀速地向右扫过金属杆后,金属杆的速度变为  。设金属杆长为 对应的电阻为 ,金属杆与导轨之间动摩擦因数为
。设金属杆长为 对应的电阻为 ,金属杆与导轨之间动摩擦因数为  ,导轨电阻不计,导轨足够长,杆在运动过程中始终与导轨垂直且两端与导轨保持良好接粒,求:
,导轨电阻不计,导轨足够长,杆在运动过程中始终与导轨垂直且两端与导轨保持良好接粒,求:
的平行金属导轨固定在水平面上,其右端接一阻值为 的电阻。质量为 的金属杆 静置在导轨上,其左侧的矩形匀强磁场区域 的磁感应强度大小为 方向竖直向下,当该磁场区域以速度 匀速地向右扫过金属杆后,金属杆的速度变为 。设金属杆长为 对应的电阻为 ,金属杆与导轨之间动摩擦因数为 ,导轨电阻不计,导轨足够长,杆在运动过程中始终与导轨垂直且两端与导轨保持良好接粒,求: 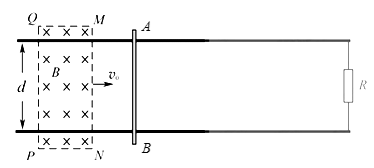
-
(1)
 刚扫到金属杆时,金属杆中感应电流的大小和感应电流方向;
刚扫到金属杆时,金属杆中感应电流的大小和感应电流方向;
-
(2)
 刚扫到金属杆时,金属杆的加速度大小
刚扫到金属杆时,金属杆的加速度大小  ;
;
-
(3) 若矩形匀强磁场区域 扫过金属杆过程中,金属杆向右滑动了
 ,求此过程中安培力对金属杆做的功。
,求此过程中安培力对金属杆做的功。
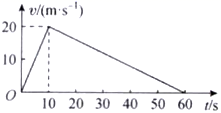
在平直的公路上,汽车由静止开始做匀加速运动,当速度达到一定值后立即关闭发动机,汽车继续滑行直到停止。这辆汽车  图像如图所示,设在汽车行驶的整个过程中,汽车的牵引力和汽车所受的阻力都是恒定的,汽车牵引力大小为
图像如图所示,设在汽车行驶的整个过程中,汽车的牵引力和汽车所受的阻力都是恒定的,汽车牵引力大小为  ,阻力大小为
,阻力大小为  ,在汽车行驶的整个过程中,牵引力做功为
,在汽车行驶的整个过程中,牵引力做功为  ,克服阻力做功为
,克服阻力做功为  ,则( )
,则( )
图像如图所示,设在汽车行驶的整个过程中,汽车的牵引力和汽车所受的阻力都是恒定的,汽车牵引力大小为 ,阻力大小为 ,在汽车行驶的整个过程中,牵引力做功为 ,克服阻力做功为 ,则( )
A .  B .
B .  C .
C .  D .
D . 
B .
C .
D .
如图所示,在光滑绝缘水平面上,有一绝缘轻质弯杆  ,
,  ,弯杆可绕固定轴
,弯杆可绕固定轴  在水平面内做无摩擦的自由转动。杆上A、 两点分别固定着两个质量相同的带电小球,其质量均为 ,电荷量分别为
在水平面内做无摩擦的自由转动。杆上A、 两点分别固定着两个质量相同的带电小球,其质量均为 ,电荷量分别为  和
和  。已知
。已知  。空间存在水平向右,场强大小为
。空间存在水平向右,场强大小为  的匀强电场,初始时刻
的匀强电场,初始时刻  与电场方向平行。(忽略两小球间的相互作用)问:
与电场方向平行。(忽略两小球间的相互作用)问:
, ,弯杆可绕固定轴 在水平面内做无摩擦的自由转动。杆上A、 两点分别固定着两个质量相同的带电小球,其质量均为 ,电荷量分别为 和 。已知 。空间存在水平向右,场强大小为 的匀强电场,初始时刻 与电场方向平行。(忽略两小球间的相互作用)问: 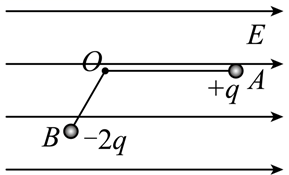
-
(1) 选 点电势为0,求A、 两球在初始时刻处电势能之和;
-
(2) 从初始位置开始释放系统,问转过
 角时 球的速度是多少?(结果可用根号表示)
角时 球的速度是多少?(结果可用根号表示)
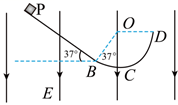
如图所示,在竖直平面内放置的粗糙直线轨道 与放置的光滑圆弧轨道  相切于 点,圆心角
相切于 点,圆心角  ,线段
,线段  垂直于
垂直于  ,圆弧轨道半径为 ,直线轨道 长为
,圆弧轨道半径为 ,直线轨道 长为  ,整个轨道处于匀强电场中,电场强度方向平行于轨道所在的平面且垂直于直线 ,现有一个质量为 、带电荷量为 的小物块
,整个轨道处于匀强电场中,电场强度方向平行于轨道所在的平面且垂直于直线 ,现有一个质量为 、带电荷量为 的小物块  从A点无初速度释放,小物块
从A点无初速度释放,小物块  与 之间的动摩擦因数
与 之间的动摩擦因数  ,电场强度大小
,电场强度大小  ,
,  ,
,  ,重力加速度为
,重力加速度为  ,忽略空气阻力。求:
,忽略空气阻力。求:
与放置的光滑圆弧轨道 相切于 点,圆心角 ,线段 垂直于 ,圆弧轨道半径为 ,直线轨道 长为 ,整个轨道处于匀强电场中,电场强度方向平行于轨道所在的平面且垂直于直线 ,现有一个质量为 、带电荷量为 的小物块 从A点无初速度释放,小物块 与 之间的动摩擦因数 ,电场强度大小 , , ,重力加速度为 ,忽略空气阻力。求:
-
(1) 小物块第一次通过
 点时对轨道的压力大小;
点时对轨道的压力大小;
-
(2) 小物块第一次从 点飞出后上升的最大高度;
-
(3) 小物块在直线轨道 上运动的总路程。
质量M=3kg的滑板A置于粗糙的水平地面上,A与地面的动摩擦因数µ1=0.3,其上表面右侧光滑段长度L1=2m,左侧粗糙段长度为L2 , 质量m=2kg、可视为质点的滑块B静止在滑板上的右端,滑块与粗糙段的动摩擦因数µ2=0.15,取g=10m/s2 , 现用F=18N的水平恒力拉动A向右运动,当A、B分离时,B对地的速度vB=1m/s,求L2的值。

如图为某款弹射游戏的简化示意图,水平轨道OAB及EF处于同一水平面上,其中AB段粗糙,长度xAB=3R,动摩擦因数μ= , 其余部分均光滑,EF段足够长。竖直平面内固定两光滑
, 其余部分均光滑,EF段足够长。竖直平面内固定两光滑 圆弧轨道BC、CD,半径分别为R和2R,其中R=0.8m,BC、CD间存在缝隙,恰能使弹射小球无碰撞通过,间隙大小可忽略,圆弧BC与水平轨道AB相切于B点,E点恰好位于D点的正下方。已知弹射器的弹性势能与弹簧形变量的平方成正比,可视为质点的弹射小球质量为m=0.1kg,当弹簧压缩量为Δx时,恰能运动到C处,g取10m/s2 , 求:
圆弧轨道BC、CD,半径分别为R和2R,其中R=0.8m,BC、CD间存在缝隙,恰能使弹射小球无碰撞通过,间隙大小可忽略,圆弧BC与水平轨道AB相切于B点,E点恰好位于D点的正下方。已知弹射器的弹性势能与弹簧形变量的平方成正比,可视为质点的弹射小球质量为m=0.1kg,当弹簧压缩量为Δx时,恰能运动到C处,g取10m/s2 , 求:
, 其余部分均光滑,EF段足够长。竖直平面内固定两光滑圆弧轨道BC、CD,半径分别为R和2R,其中R=0.8m,BC、CD间存在缝隙,恰能使弹射小球无碰撞通过,间隙大小可忽略,圆弧BC与水平轨道AB相切于B点,E点恰好位于D点的正下方。已知弹射器的弹性势能与弹簧形变量的平方成正比,可视为质点的弹射小球质量为m=0.1kg,当弹簧压缩量为Δx时,恰能运动到C处,g取10m/s2 , 求: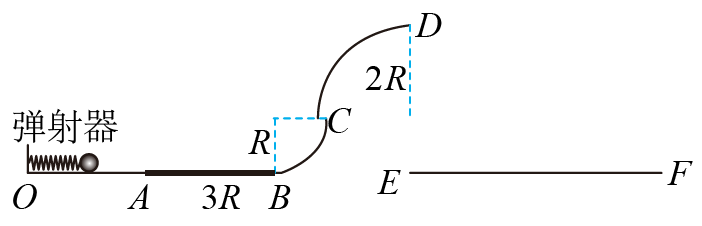
-
(1) 压缩量为Δx时,弹簧的弹性势能Ep;
-
(2) 当弹簧压缩量增加到2Δx,小球运动到D点时对圆弧轨道CD的压力;
-
(3) 在(2)题条件下,调整CD弧的半径,求落点距E点的最远距离
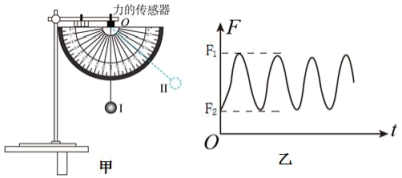
某小组成员想“探究动能定理在曲线运动中是否成立”,经讨论后,提出利用如图甲的装置进行探究。
实验器材:铁架台、力传感器(含数据采集器及配套软件、计算机,图中未画出)、量角器、轻质细绳、小球和刻度尺。
实验步骤如下:
①小球静止在位置Ⅰ时,力传感器的示数为 , 测得细绳悬点O到小球球心的长度为L;
, 测得细绳悬点O到小球球心的长度为L;
②将小球拉至与竖直方向夹角为 处静止释放;
处静止释放;
③通过软件描绘出细绳拉力随时间变化如图乙;( 、
、 已知)
已知)
④改变静止释放时细绳与竖直方向夹角值,重复实验,得到多组数据。
-
(1) 本实验中,小球的重力大小为;
-
(2) 从静止释放到最低点的过程中,重力对小球做功为,增加的动能为;(请用题目中所提供的物理量来表示)
-
(3) 代入实验数据计算,我们发现小球动能的增加量总是略小于重力做的功,请分析可能的原因。;(只写一条即可)
-
(4) 根据本实验的数据可得出:在误差范围内,重力做功与小球增加的动能相同,我们是否可以得出“动能定理在曲线运动中可适用”的结论?请说明理由?;
-
(5) 请你从物理规律分析,下列哪些物理量可以不必测量的有:____。A . 球的质量m B . 摆角
C . 悬点O到球心的长度L;
D . 重力G
如图甲所示,水平传送带在电动机带动下沿顺时针方向匀速转动,将一质量为 的木箱(可视为质点)轻放到传送带最左端,木箱运动的速度随时间
的木箱(可视为质点)轻放到传送带最左端,木箱运动的速度随时间 变化的图像如图乙所示,
变化的图像如图乙所示, 末木箱到达传送带最右端,重力加速度取
末木箱到达传送带最右端,重力加速度取 , 则( )
, 则( )
的木箱(可视为质点)轻放到传送带最左端,木箱运动的速度随时间变化的图像如图乙所示,末木箱到达传送带最右端,重力加速度取 , 则( )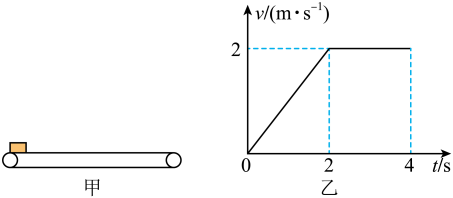
A . 木箱与传送带之间的动摩擦因数为0.1
B . 整个过程中摩擦生热为20J
C . 整个过程中传送带对木箱做的功为60J
D . 为把木箱从传送带左端运送到右端,电动机多消耗的电能为40J
最近更新
- 东南亚城市中,既是所在国首都又是该国最大城市、最大海港的是( )A.金边 B.马尼拉 C.曼谷
- 20世纪90年代,美国经济持续高速增长主要得益于: A.新经济的出现与发展 B.第三次科技革命 C.美国的
- 生态学家高斯(Gause)在0.5 mL培养液中放人5个大草履虫,在培养第5天之后,大草履虫的数量基本维持在375个左右
- 下列含硫物质中,硫元素的化合价为+4的是()。 A.S B.H2S C.H2SO3 D.H2SO4
- 某无色溶液中加入氯化钡溶液后有白色沉淀,该沉淀不溶于稀硝酸,该溶液中() A.一定含有SO B.一定含
- 材料一:美国学者费正清在《伟大的中国革命》中指出:“大家都认为鸦片战争是一次典型的非正义战争,是鸦片染成的战争……其实,
- 用化学符号表示下列含义 (1)2个铁原子 (2)3个氧分子 (3)镁离子 (4)氧化钠 (5)保持水的化学性质的最小粒
- The golden autumnlight provided the artist with the________f
- 感受身边的物理——质量为1.5kg的物体最可能是( ) A、一个乒乓球 B、一只母鸡 C、一
- 近代以来,现代化成为世界历史发展的主要潮流。现代化包括经济工业化、政治民主化、思想理性化、城市化等内容。进入20世纪后,
- 关于运动和力,下列说法中正确的是 (
- 水是宝贵的自然资源,在工农业生产和日常生活中有着极其广泛的应用。 (1)自来水的生产过程大体如下图: 上图过滤池中有活性
- 读“水稻种植业、商品谷物农业、乳畜业的空间分布范围(曲线与横坐标围成的区域)与热量、水分条件的关系示意图”,完成5~7题
- 人在呼气时,肺容积及肺内气压的变化是( ) A.肺容积缩小,肺内气压升高 B.肺容积增大,肺内气压升
- 生物种类多,有净化水源、蓄洪抗旱作用,被称为“地球之肾”的生态系统是( )A. 草原生态系统 B. 湿地生态系统
- 阅读下列材料材料一:“方里而井,井九百亩,其中为公田。八家皆私百亩,同养公田,公事毕,然后敢治私事。” ――《孟子.滕
- 在五个数字1,2,3,4,5中,若随机取出三个数字,则剩下两个数字都是奇数的概率是______________(结果用数
- 下列细胞器,光学显微镜下能看到的是( ) A. 核糖体 B.内质网 C.叶绿体 D.A、B、C都
- NO2、O2和熔融KNO3可制作燃料电池,其原理如图所示。该电池在放电过程中石墨Ⅰ电极上生成氧化物Y,Y可循环使用。下列
- 10. Sometimes I really wonder how I could make friends with



