浙江省“超级全能生”2021届高考选考科目通用技术9月试卷
浙江省“超级全能生”2021届高考选考科目通用技术9月试卷
教材科目:通用技术
试卷分类:高三上学期
文件类型:.doc
发布时间:2026-07-01
授权方式:免费下载
下载地址:点此下载
教材科目:通用技术
试卷分类:高三上学期
文件类型:.doc
发布时间:2026-07-01
授权方式:免费下载
下载地址:点此下载
以下为试卷部分试题预览
| 1. 单选题 | 详细信息 |
|
如图所示为一把园艺剪刀,以下标注的尺寸中不是从人机关系角度考虑的是( )
A . 90
B . 22
C . φ8
D . 135
|
|

| 2. 单选题 | 详细信息 |
|
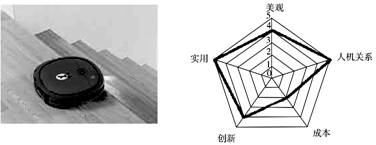
如图所示是一款扫地机器人及其评价坐标图,根据坐标图下列分析中不恰当的是( )
A . 小熊风格外观,较为美观
B . 5.7厘米超薄机身,能更好地清洁家具底部地面,实用性好
C . 扫地机器人遇到台阶时能防止跌落,实现了人机关系的安全目标
D . 采用APP智能控制,可以远程开启清洁,创新性较好
|
|
| 3. 单选题 | 详细信息 |
|
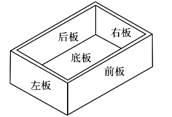
小明同学想利用家中装修剩下的三块木板制作一个无盖的长方体收纳盒(如图所示),其中有两块木板的尺寸相同为150mm×100mm×5mm,另一块尺寸为100mm×100mm×5mm利用现有材料,要求左板和右板尺寸相同,前板和后板尺寸相同,连接方式选用钉子连接,以下方案小明肯定,无法完成的是( )
A . 储物盒尺寸为155mm×105mm×50mm
B . 储物盒尺寸为150mm×110mm×50mm
C . 储物盒尺寸为160mm×100mm×50mm
D . 储物盒尺寸为150mm×100mm×55mm
|
|
| 4. 单选题 | 详细信息 |
|
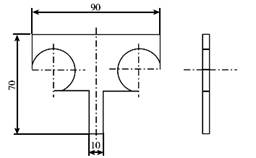
通用技术课上,小明设计了如图所示的工件。请根据图完成以下小题。
|
|
| 5. 单选题 | 详细信息 |
|
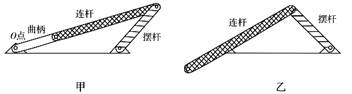
如图所示为曲柄摇杆机构,曲柄与连杆,连杆与摆杆,摆杆与底座之间都是铰连接。O点与电机相连,曲柄在电机带动~下顺时针转动,图甲与图乙为该曲柄摇杆机构的两种极限状态,下列说法中正确的是( )
A . 从图甲状态运动至图乙状态的过程中,连杆主要受弯曲
B . 从图甲状态运动至图乙状态的过程中,曲柄主要受压
C . 摆杆在运动过程中受弯曲
D . 从图乙状态运动至图甲状态的过程中,连杆主要受压
|
|
| 6. 单选题 | 详细信息 |
|
下列流程中不合理的是( )
A . 制定设计方案的步骤:收集信息→设计分析→方案构思→方案筛选→方案呈现
B . 设计的一般过程:发现与明确问题→制定设计方案→制作模型或原型→测试、评估及优化→编写产品说明书
C . 专利申请流程:提交专利申请→受理→初审→专利申请公布→实质审查→授权
D . 金属材料的划线步骤:划基准线→划加工尺寸线→划轮廓线→冲眼
|
|
| 7. 单选题 | 详细信息 |
|
如图是一款遥控机器人,底部装有灵活的滑轮,可以实现定向移动。当用户按下遥控器上的前后左右等按钮,机器人内部红外接收装置接收到信号后,控制装置发出指令,电机带动滑轮完成相应动作,请根据题意完成以下小题。
|
|

| 8. 单选题 | 详细信息 |
|
下列通用技术课程中常见的芯片中管脚个数与其余三项不同的是( )
A . JN6201集成芯片
B . 四二输入与非门集成芯片
C . 四二输入或门集成芯片
D . 555集成芯片
|
|
| 9. 单选题 | 详细信息 |
|
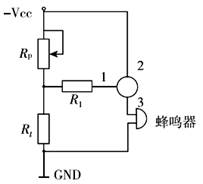
小明用指针式多用电表测量如图所示的电路中的三极管,已知该三极管处于放大状态,当红表笔接③脚,黑表笔接①脚,测得电压为4.3V;红表笔接③脚,黑表笔接②脚,测得电压为5V,已知该电路能实现低温报警功能,下列说法正确的是( )
A . R1为负温度系数热敏电阻
B . 该三极管为NPN型的硅三极管
C . ③脚为发射极,②脚为集电极
D . 该电路应选用无源蜂鸣器
|
|
| 10. 单选题 | 详细信息 |
|
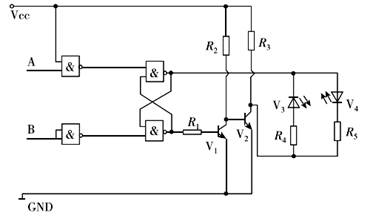
如图所示的电路,V1和V2均工作在开关状态,先输入A=1,B=0;然后再输入A=0,B=0。此时V3、V4发光状态是( )
A . V3发光,V4不发光
B . V3不发光,V4不发光
C . V3不发光,V4发光
D . V3发光,V4发光
|
|
高中通用技术 试卷推荐
- 苏教版(2019)通用技术必修《技术与设计1》 第六章 模型或原型的制作 单元测试题
- 浙江省2020年7月通用技术选考试卷
- 陕西省榆林市第十二中学2019-2020学年高二下学期通用技术第二次月考(期中)试卷
- 浙江省金丽衢十二校2019年高三上学期通用技术9月第三次联考试卷
- 浙江省2017年高考通用技术模拟试卷(二)
- 重庆市2020年高等职业教育分类通用技术模拟测试卷(五)
- 浙江省通用技术高考复习综合测试试卷(五)
- 苏教版(2019)高中通用技术必修《技术与设计1》1.3 技术的性质 同步练习题
- 苏教版(2019)高中通用技术必修《技术与设计1》3.2 明确问题 同步练习题
- 江苏省2019-2020学年普通高中学业水平考试(苏州卷)通用技术试卷
- 苏教版(2019)高中通用技术必修《技术与设计1》2.1 技术与设计的关系 同步练习题
- 苏教版(2019)高中通用技术必修《技术与设计1》3.1 发现问题 同步练习题1
最近更新
- 在△ABC中,∠A =24°,∠B =52°,三边长分别为a、b、c.求证: .图1-22
- 如图是实验室常见的气体制取、干燥和收集装置.若用过氧化氢和催化剂二氧化锰制取干燥的氧气,则合理的装置组合为
- 某市中考实验操作考试时,实验员为同学们“探究小灯泡的额定电功率”准备了以下器材:额定电压为2.5V的小灯泡(正常发光时电
- 把少量下列物质分别放入水中,充分搅拌,可以得到溶液的是()A. 面粉 B. 碘 C. 汽油 D. 蔗糖
- 电热炉内有两个阻值分别为R1=60Ω和R2=120Ω的发热电阻,用一个旋转开关可以实现电热炉多档位工作的要求。将电热炉接
- 阅读右面的程序框图,执行相应的程序,则输出k的结果是_______
- 书面表达 根据所给图片写一篇80词左右的英语短文,要求完整叙述图片内容_________________________
- 计算:(π-3.14)O= 。
- 下图为直流电源,为浸透饱和氯化钠溶液和酚酞试液的滤纸,为电镀槽,接通电路后,发现上的c点显红色,请填空:(1)电源上的a
- 20.比较我国主要运输方式的运量和运费特点,回答16~17题。16.图中数字代表的运输方式为 A.①水路②铁路③航空④公
- 依次填入下列横线处的词,恰当的一项是 读万卷书,行万里路,可以不断丰富生活阅历,提高人格修养。走近书籍,我们丰富
- (本题满分14分) 在中,分别是三个内角的对边.若,.(1)求,的值; (2)求的大小.
- (2013广州市三模)如图,力F垂直作用在倾角为α的三角滑块上,滑块没被推动,则滑块受到水平地面的静摩擦力大小为:
- 四个小动物换座位,开始是鼠、猴、兔、猫分别坐1、2、3、4号位上(如图),第一次前后排动物互换座位,第二次左右列动物互换
- 若向量的夹角为,且, ,则向量与向量的夹角为( ) A. B. C. D.
- 简述“瑞珏之死”的主要情节。(《家》)
- 童趣余忆童稚时,能张目对日,明察秋毫,见藐小之物必细察其纹理,故时有物外之趣。 夏蚊成雷,私拟作群鹤舞于空中,心之所向,
- 小明、小芳做一个“配色”的游戏,如图是两个可以自由转动的转盘,每个转盘被分成面积相等的几个扇形,并涂上图中所示的颜色.同
- 北京和广州两地的自转角速度和线速度相比较,正确的叙述是 A.两地的角速度和线速度都相同 B.两地的角速度和线速度都不相
- 如图3所示,平行于y轴的导体棒以速度v向右匀速直线运动,经过半径为R、磁感应强度为B的圆形匀强磁场区域,导体棒中的感应电



