动量守恒定律 知识点题库
质量为m的小球A以速度v0在光滑水平面上运动,与质量为2m的静止小球B发生对心碰撞,则碰撞后A球的速度大小vA和B球的速度大小vB可能为( )
A . vA=  v0 , vB
v0 , vB  v0
B . vA= v0 , vB=
v0
B . vA= v0 , vB=  v0
C . vA=
v0
C . vA=  v0 , vB=
v0 , vB=  v0
D . vA=
v0
D . vA=  v0 , vB=
v0 , vB=  v0
v0
v0 , vB v0
B . vA= v0 , vB= v0
C . vA= v0 , vB= v0
D . vA= v0 , vB= v0
A、B两球沿同一条直线运动,图示的x﹣t图象记录了它们碰撞前后的运动情况,其中a、b分别为A、B碰撞前的x﹣t图线,c为碰撞后它们的x﹣t 图线.若A球质量为1kg,则B球质量是( )
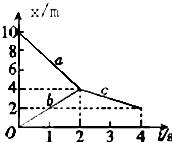
A . 0.17kg
B . 0.34kg
C . 0.67kg
D . 1.00kg
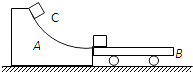
如图所示,A为一具有光滑曲面的固定轨道,轨道底端是水平的,质量M=40kg小车B静止于轨道右侧,其板面与轨道底端靠近且在同一水平面上,一个质量m=20kg的物体C以2.0m/s的初速度从轨道顶滑下,冲上小车B后经一段时间与小车相对静止并继续一起运动.若轨道顶端与底端水平面的高度差h为0.8m,物体与小车板面间的动摩擦因数μ为0.40,小车与水平面间的摩擦忽略不计,(取g=10m/s2)求:
-
(1) 从物体冲上小车到与小车相对静止所用的时间;
-
(2) 物体冲上小车后相对于小车板面滑动的距离.
A球的质量是m,B球的质量是2m,它们在光滑的水平面上以相同的动量运动.B在前,A在后,发生正碰后,A球仍朝原方向运动,但其速度是原来的一半,碰后两球的速度比vA′:vB′为( )
A . 2:3
B . 1:3
C . 2:1
D . 1:2
如图所示,一辆小车静止在光滑水平面上,A、B两人分别站在车的两端.当两人同时相向运动时( )
![]()
A . 若小车不动,两人速率一定相等
B . 若小车向左运动,A的动量一定比B的小
C . 若小车向左运动,A的动量一定比B的大
D . 若小车向右运动,A的动量一定比B的大
在光滑水平面上静置有质量均为m的木板AB和滑块CD,木板AB上表面粗糙.动摩擦因数为μ,滑块CD上表面是光滑的 圆弧,其始端D点切线水平且在木板AB上表面内,它们紧靠在一起,如图所示.一可视为质点的物块P,质量也为m,从木板AB的右端以初速度v0滑上木板AB,过B点时速度为  ,又滑上滑块CD,最终恰好能滑到滑块CD圆弧的最高点C处,求:
,又滑上滑块CD,最终恰好能滑到滑块CD圆弧的最高点C处,求:
圆弧,其始端D点切线水平且在木板AB上表面内,它们紧靠在一起,如图所示.一可视为质点的物块P,质量也为m,从木板AB的右端以初速度v0滑上木板AB,过B点时速度为 ,又滑上滑块CD,最终恰好能滑到滑块CD圆弧的最高点C处,求: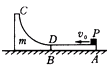
-
(1) 物块滑到B处时木板的速度vAB;
-
(2) 木板的长度L;
-
(3) 滑块CD圆弧的半径R.
如图,放在光滑水平面上的两个木块A、B中间用轻弹簧相连接,其质量分别为m1=2kg、m2=970g,木块A左侧靠一固定竖直挡板,且弹簧处于自然伸长状态.某一瞬间有一质量为m0=30g的子弹以v0=100m/s的速度水平向左射入木块B,并留在木块B内,木块B向左压缩弹簧然后被弹簧弹回,弹回时带动木块A运动,已知弹簧的形变在弹性限度范围内.求:
①从子弹射入木块B后到木块A恰好离开挡板的过程中,木块B与子弹一起受到的弹簧弹力的冲量;
②当弹簧拉伸到最长时,弹簧的最大弹性势能Ep .
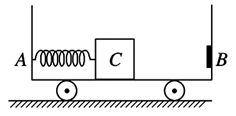
总质量为M的小车ab,原来静止在光滑的水平面上.小车的左端a固定一根不计质量的弹簧,弹簧的另一端放置一块质量为m的物体C.已知小车的水平底板光滑,且M>m,开始时,弹簧处于压缩状态,如图,当弹簧突然释放后,物体c离开弹簧向b端冲去,并跟b端粘合在一起,那么,以下说法中正确的是( )
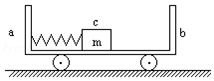
A . 物体c离开弹簧时,小车一定向左运动
B . 物体c离开弹簧时,小车运动的速率跟物体c相对小车运动的速率之比为  C . 物体c离开弹簧时,小车的动能与物体c的动能之比为
D . 物体c与车的b端粘合在一起后,小车立即停止运动
C . 物体c离开弹簧时,小车的动能与物体c的动能之比为
D . 物体c与车的b端粘合在一起后,小车立即停止运动
如图所示,在光滑的水平面上放置一质量为m的小车,小车上有一半径为R的 光滑的弧形轨道,设有一质量为m的小球,以v0的速度,方向水平向左沿圆弧轨道向上滑动,达到某一高度h后,又沿轨道下滑,试求h=,小球刚离开轨道时的速度为。
光滑的弧形轨道,设有一质量为m的小球,以v0的速度,方向水平向左沿圆弧轨道向上滑动,达到某一高度h后,又沿轨道下滑,试求h=,小球刚离开轨道时的速度为。 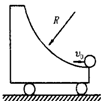
木块长为L,静止在光滑的水平桌面上,有A、B两颗规格不同的子弹以速度相反的VA、VB同时射向木块,A、B在木块中嵌入的深度分别为dA、dB , 且dA>dB , (dA+dB)<L,木块一直保持静止,如图所示,则由此判断子弹A、B在射入前:( )
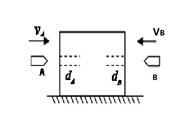
A . 速度  B . 子弹A的动能等于子弹B的动能
C . 子弹A的动量大小大于子弹B的动量大小
D . 子弹A的动量大小等于子弹B的动量大小
B . 子弹A的动能等于子弹B的动能
C . 子弹A的动量大小大于子弹B的动量大小
D . 子弹A的动量大小等于子弹B的动量大小
B . 子弹A的动能等于子弹B的动能
C . 子弹A的动量大小大于子弹B的动量大小
D . 子弹A的动量大小等于子弹B的动量大小
如图所示,一块足够长的木板,放在光滑的水平面上,在木板上自左向右放着序号是1、2、3、…19的19个木块,所有木块的质量均为m,与木板间的动摩擦因数都相同。开始时,木板静止不动,第 1、2、3、…19号木块的初速度分别是v0、2v0、3v0、…19v0 , 方向都向右,木板的质量与所有的木块的总质量相同,最终所有木块与木板以共同的速度匀速运动.设木块之间均无相互碰撞,木板足够长,则( )
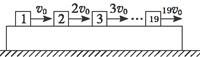
A . 所有木块与木板一起匀速运动的速度为5v0
B . 所有木块与木板一起匀速运动的速度为9.5v0
C . 第1号木块与木板刚好相对静止时的速度为
D . 每个木块在与木板刚好相对静止时的速度为其最小值
D . 每个木块在与木板刚好相对静止时的速度为其最小值
小车静置于光滑的水平面上,小车的A端固定一个水平轻质小弹簧,B端粘有橡皮泥,小车的质量(包含橡皮泥)为M,质量为m的木块C(可视为质点)放在小车上,用细绳连接于小车的A端并使弹簧压缩(细绳未画出),开始时小车与C都处于静止状态,静止时C与B端距离为L,如图所示,当突然烧断细绳,弹簧被释放,使木块C离开弹簧向B端冲去,并跟B端橡皮泥粘在一起,以下说法中正确的是( )
A . 如果小车内表面光滑,整个系统任何时刻机械能都守恒
B . 当木块对地运动速度大小为v时,小车对地运动速度大小为  v
C . 小车向左运动的最大位移为
v
C . 小车向左运动的最大位移为  D . 与橡皮泥粘在一起后,AB继续向右运动
D . 与橡皮泥粘在一起后,AB继续向右运动
v
C . 小车向左运动的最大位移为
D . 与橡皮泥粘在一起后,AB继续向右运动
实验观察到,静止在匀强磁场A点的原子核发生β衰变,衰变产生的新核与电子恰在纸面内做匀速圆周运动,运动方向和轨迹示意图如图,则( )
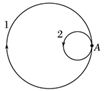
A . 轨迹1是电子的,磁场方向垂直纸面向里
B . 轨迹2是电子的,磁场方向垂直纸面向里
C . 轨迹1是新核的,磁场方向垂直纸面向里
D . 轨迹2是新核的,磁场方向垂直纸面向里
如图所示,质量为m、高为h的物体A静止在足够长的光滑水平地面上。其左侧表面为 圆弧,底面右端恰好与地面相切。质量为2m的可视为质点的物体B从A顶端由静止滑下,到达水平地面后与迎面而来的质量为4m的物体C发生弹性正碰。不计一切摩擦,求:
圆弧,底面右端恰好与地面相切。质量为2m的可视为质点的物体B从A顶端由静止滑下,到达水平地面后与迎面而来的质量为4m的物体C发生弹性正碰。不计一切摩擦,求: 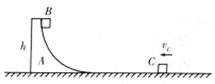
-
(1) B下滑到地面过程中A位移xA的大小;
-
(2) A、B分开时两者的速度vA和vB的大小;
-
(3) 若B、C相碰后,B和A不再相碰,C速度vC大小的取值范围。
如图所示,装置的左边是足够长的光滑水平台面,一轻质弹簧左端固定,右端连接着质量  的小物块A。装置的中间是水平传送带,它与左右两边的台面等高,并能平滑对接.传送带始终以
的小物块A。装置的中间是水平传送带,它与左右两边的台面等高,并能平滑对接.传送带始终以  的速度逆时针转动。装置的右边是一段光滑的水平台面连接的光滑曲面,质量
的速度逆时针转动。装置的右边是一段光滑的水平台面连接的光滑曲面,质量  的小物块B从其上距水平台面
的小物块B从其上距水平台面  m处由静止释放。已知物块B与传送带之间的摩擦因数
m处由静止释放。已知物块B与传送带之间的摩擦因数  ,传送带的长度
,传送带的长度  。设物块A、B之间发生的是对心弹性碰撞,第一次碰撞前物块A静止且处于平衡状态.取
。设物块A、B之间发生的是对心弹性碰撞,第一次碰撞前物块A静止且处于平衡状态.取  。
。
的小物块A。装置的中间是水平传送带,它与左右两边的台面等高,并能平滑对接.传送带始终以 的速度逆时针转动。装置的右边是一段光滑的水平台面连接的光滑曲面,质量 的小物块B从其上距水平台面 m处由静止释放。已知物块B与传送带之间的摩擦因数 ,传送带的长度 。设物块A、B之间发生的是对心弹性碰撞,第一次碰撞前物块A静止且处于平衡状态.取 。 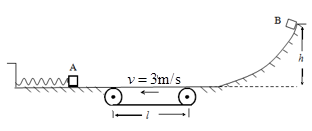
-
(1) 求物块B与物块A第一次碰撞前的速度大小
-
(2) 通过计算说明物块B与物块A第一次碰撞后能否运动到右边曲面上?
-
(3) 如果物块A、B每次碰撞后,物块A再回到平衡位置时都会立即被锁定,而当他们再次碰撞前锁定被解除,试求出物块B第n次碰撞后运动的速度大小
在光滑的水平面上,质量为  的小球
的小球  以速率
以速率  向右运动。在小球 的正前方有一质量为
向右运动。在小球 的正前方有一质量为  的小球
的小球  处于静止状态,如图所示。小球 与小球 发生弹性碰撞后,均向右运动,且碰后
处于静止状态,如图所示。小球 与小球 发生弹性碰撞后,均向右运动,且碰后  的速度大小之比为1∶4,则两小球质量之比
的速度大小之比为1∶4,则两小球质量之比  为( )
为( )
的小球 以速率 向右运动。在小球 的正前方有一质量为 的小球 处于静止状态,如图所示。小球 与小球 发生弹性碰撞后,均向右运动,且碰后 的速度大小之比为1∶4,则两小球质量之比 为( ) 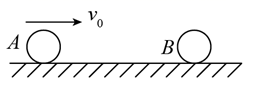
A . 1∶2
B . 2∶1
C . 3∶1
D . 1∶3
如图所示,半径为R、内壁光滑的半圆轨道固定于竖直平面内,下端C与水平地面相切,上端B与水平传送带的左端之间形成一小的狭缝,可让放在传送带上的小物块刚好通过,传送带以恒定速度  逆时针转动。水平地面D点放置一质量为3m的小物块乙,C、D间距为2R。现在传送带上的A处轻轻放上质量为m的小物块甲,A、B间的距离L=2R,它经传送带加速后,从B处沿半圆轨道滑下,再经C沿水平地面滑到D处,与物块乙相撞后立即粘在一起,继续向前滑行一段距离后静止。两物块均可视为质点,甲物块与传送带间的动摩擦因数及甲、乙两物块与地面间的动摩擦因数均为μ=0.5,重力加速度为g,传送带足够长:
逆时针转动。水平地面D点放置一质量为3m的小物块乙,C、D间距为2R。现在传送带上的A处轻轻放上质量为m的小物块甲,A、B间的距离L=2R,它经传送带加速后,从B处沿半圆轨道滑下,再经C沿水平地面滑到D处,与物块乙相撞后立即粘在一起,继续向前滑行一段距离后静止。两物块均可视为质点,甲物块与传送带间的动摩擦因数及甲、乙两物块与地面间的动摩擦因数均为μ=0.5,重力加速度为g,传送带足够长:
逆时针转动。水平地面D点放置一质量为3m的小物块乙,C、D间距为2R。现在传送带上的A处轻轻放上质量为m的小物块甲,A、B间的距离L=2R,它经传送带加速后,从B处沿半圆轨道滑下,再经C沿水平地面滑到D处,与物块乙相撞后立即粘在一起,继续向前滑行一段距离后静止。两物块均可视为质点,甲物块与传送带间的动摩擦因数及甲、乙两物块与地面间的动摩擦因数均为μ=0.5,重力加速度为g,传送带足够长: 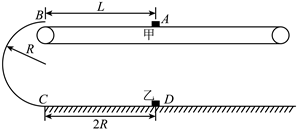
-
(1) 求甲物块经过半圆形轨道的C点时对轨道的压力FN;
-
(2) 求两物块最终静止的位置离D点的距离x;
-
(3) 若A、B间的距离L可调,求两物块最终静止的位置离D点的距离x随L变化的函数关系式。
物块、中间用一根轻质弹簧相接,放在光滑水平面上, , 如图甲所示。开始时两物块均静止,弹簧处于原长,
, 如图甲所示。开始时两物块均静止,弹簧处于原长, 时对物块施加水平向右的恒力
时对物块施加水平向右的恒力 ,
,  时撤去,在
时撤去,在 内两物体的加速度随时间变化的情况如图乙所示。弹簧始终处于弹性限度内,整个运动过程中以下分析正确的是( )
内两物体的加速度随时间变化的情况如图乙所示。弹簧始终处于弹性限度内,整个运动过程中以下分析正确的是( )
、中间用一根轻质弹簧相接,放在光滑水平面上, , 如图甲所示。开始时两物块均静止,弹簧处于原长,时对物块施加水平向右的恒力 , 时撤去,在内两物体的加速度随时间变化的情况如图乙所示。弹簧始终处于弹性限度内,整个运动过程中以下分析正确的是( )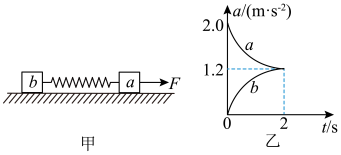
A . 时弹簧长度最长
B . 时物体的速度大小为 C . 当弹簧长度由最长变为最短时,弹簧对物体的做功代数和为0
D . 通过题干数据可求出物体的质量和恒力的大小
C . 当弹簧长度由最长变为最短时,弹簧对物体的做功代数和为0
D . 通过题干数据可求出物体的质量和恒力的大小
时弹簧长度最长
B . 时物体的速度大小为
C . 当弹簧长度由最长变为最短时,弹簧对物体的做功代数和为0
D . 通过题干数据可求出物体的质量和恒力的大小
如图所示,质量为0.1kg的小圆环A穿在光滑的水平直杆上,小球B的质量为0.2kg,A、B用长为L=0.8m的细线连接,B悬挂在A下方并处于静止状态。t=0时刻,小圆环A获得沿杆向左的冲量0.6N•s,取g=10m/s2。下列说法正确的是( )
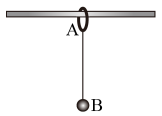
A . t=0时刻细线对B的拉力大小为2N
B . 小球B第一次运动到A的正下方时A的速度最小
C . 从小球B开始运动到第一次回到A的正下方的过程中细线对A先做负功再做正功
D . 从小球B开始运动到第一次回到A的正下方的过程中合力对B的冲量为0.6N•s
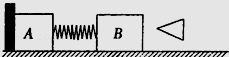
如图所示,板A左端固定有力传感器,A的质量(包括传感器) , 轻质弹簧一端固定在传感器上,另一端与物块B相连,B的质量
, 轻质弹簧一端固定在传感器上,另一端与物块B相连,B的质量 , A、B之间的动摩擦因数
, A、B之间的动摩擦因数 , A、B一起以
, A、B一起以 的速度在光滑水平地面上向右匀速运动,此过程中传感器显示弹簧弹力为零,运动一段距离后A与静止的物块C发生弹性碰撞,C的质量
的速度在光滑水平地面上向右匀速运动,此过程中传感器显示弹簧弹力为零,运动一段距离后A与静止的物块C发生弹性碰撞,C的质量 , 碰撞时间极短可忽略。A、C碰后一段时间内,传感器显示弹簧弹力F随弹簧伸长量x变化的图像如图乙所示,弹簧弹力增大到80N时,使弹簧与物块B瞬间脱离。若最终B未滑离A,取重力加速度为
, 碰撞时间极短可忽略。A、C碰后一段时间内,传感器显示弹簧弹力F随弹簧伸长量x变化的图像如图乙所示,弹簧弹力增大到80N时,使弹簧与物块B瞬间脱离。若最终B未滑离A,取重力加速度为 。求:
。求:
, 轻质弹簧一端固定在传感器上,另一端与物块B相连,B的质量 , A、B之间的动摩擦因数 , A、B一起以的速度在光滑水平地面上向右匀速运动,此过程中传感器显示弹簧弹力为零,运动一段距离后A与静止的物块C发生弹性碰撞,C的质量 , 碰撞时间极短可忽略。A、C碰后一段时间内,传感器显示弹簧弹力F随弹簧伸长量x变化的图像如图乙所示,弹簧弹力增大到80N时,使弹簧与物块B瞬间脱离。若最终B未滑离A,取重力加速度为。求:![]()
-
(1) 板A与物块C碰撞结束瞬间A、C的速度大小;
-
(2) 弹簧与物块B脱离瞬间A、B的速度大小;
-
(3) 从板A与物块C碰撞结束到板A与物块B最终相对静止的过程中,板A相对地面滑动的距离。
最近更新
- 中国人民志愿军开赴朝鲜是因为 ①朝鲜发生内战 ②美国出兵侵略朝鲜 ③美国的侵略严重威胁中国安全
- Youwill achieve nothing _____ you work hard A. unless B
- 现在,科学家们正在设法探寻“反物质”,所谓“反物质”是由“反粒子”构成的,“反粒子”跟与其对应的正粒子具有相同的质量和相
- .依次填入下列句子中横线处的词语,最恰当的一组是 () ①西方国家元首习惯在圣诞新年期间对国民讲话,祝
- The team________the footballmatch and they________much exper
- 仿照下面的示例,再写两个句子,要求使用比喻的修辞手法,句式与示例相同。(5分) 也许,你站不成巍峨的高山,但你依然可以挺
- 从2000年第一期目标的亩产70O公斤、2004年第二期的亩产800公斤、2011年第三期亩产926.6公斤,到2014
- 下列3图是研究人员对黑曲霉A1果胶酶性质的研究结果图,据图分析温度、pH和Ca2+浓度等与酶活力的关系。(1)从图上可以
- 某学校拟定了研究性学习课题“干燥的二氧化碳不能与过氧化钠反应”和“二氧化碳在有水存在时才能与过氧化钠反应”,为此某化学课
- Do you think____ a football match tomorrow?A. there will ha
- 人 的 价 值 ①人的价值,是几千年来人类思想文化史上不断争论的重要问题之一。 ②以前有人说,人的权力和地位就是人的
- 读30°N线附近四个地区简图,回答39~40题。39.①、②、③、④四城市气候特征相似的是() A.①和② B
- 浸泡在一定浓度的KNO3溶液中的洋葱表皮细胞,发生了质壁分离后又出现质壁分离复原,与质壁分离复原过程相关的细胞器有()A
- 中国在社会主义改造中的重要创举是 ( ) A.动员农民参加高级农业合作社 B.动员手
- 在一定的条件下,当64 g SO2气体被氧化成SO3气体时,共放出热量98.3 kJ。已知SO2在此条件下转化率为80%
- 下列各句中,加点的熟语使用正确的一项是( ) A.日本最近加快了缔结自由贸易协定的步伐,其深层次的原因是日本与中国在
- 下列应用及相应原理(用化学方程式表示)都正确的是( )A.用稀盐酸除铁锈 Fe2O3+6HCl=2FeCl2
- Nancy with her friends _________ jokes now. A. tell
- 我国关于人口的基本国策是 A .积极发展人口 B.设法减少人口 C.实行计划生育 D .逐渐增
- (14分)归纳总结是学习化学的重要方法来学习化学知识。请回答下列问题:(1)“一碳化学”是以一个分子中只含一个碳原子的化



