第4章 牛顿运动定律 知识点题库
下列几个关于力学问题的说法中正确的是( )
A . 米、千克、牛顿等都是国际单位制中的基本单位
B . 放在斜面上的物体,其重力沿垂直斜面的分力就是物体对斜面的压力
C . 摩擦力的方向可能与物体的运动方向一致
D . 伽利略在研究运动和力的关系时提出了著名的斜面实验,应用的物理思想方法属“等效替代”
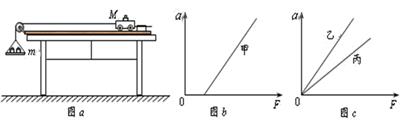
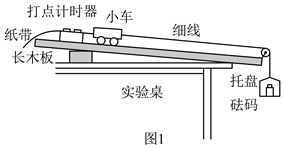
在探究加速度与力、质量的关系实验中,采用如图a所示的实验装置,把附有滑轮的长木板平放在水平的实验桌上。小车及车中砝码的质量用M表示,盘及盘中砝码的质量用m表示,小车所受拉力用F表示,小车的加速度可由小车后拖动的纸带由打点计时器打上的点计算出。
-
(1) 如图b为甲同学根据测量数据作出的a-F图线,图线不过原点的原因是,若使图线过原点应对实验装置采取的改进方法是。
-
(2) 乙、丙同学用同一装置做实验,画出了各自得到的a-F图线如图c所示,两个同学做实验时取值不同的物理量是。
-
(3) 在处理数据时,总是把托盘和砝码的重力当作小车所受合力。而实际上小车所受合力比托盘和砝码的重力要一些(选填“大”或“小”)。因此,为使实验结论的可信度更高一些,应使托盘和砝码的总质量尽可能一些(选填“大”或“小”)。
下列说法中正确的是( )
A . 千克(kg)、开尔文(K)和伏特(V)均为国际单位制中的基本单位
B . 阴极射线是由电子组成,电子来源于中子的衰变
C . 在光电效应的实验中,若增加入射光的频率,则相应的遏止电压也增加
D . α射线来源于原子核内部,是由氦原子组成
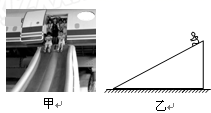
民航客机一般都有紧急出口,发生意外情况的飞机紧急着陆后,打开紧急出口,狭长的气囊会自动充气,形成一个连接出口与地面的斜面,人员可沿斜面滑行到地上,如图甲所示,图乙是其简化模型.若紧急出口下沿距地面的高度h=3.0m,气囊所构成的斜面长度L=5.0m.质量m=60kg的某旅客从斜面顶端由静止开始滑到斜面底端.已知旅客与斜面间的动摩擦因数μ=0.55,不计空气阻力及斜面的形变,旅客下滑过程中可视为质点,取重力加速度g=10m/s2 . 求:
-
(1) 旅客沿斜面下滑时的加速度大小;
-
(2) 旅客滑到斜面底端时的速度大小;
-
(3) 旅客从斜面顶端滑到斜面底端的过程中,斜面对旅客所施加的支持力的冲量大小.
如图所示,一根轻弹簧下端固定,竖立在水平面上,其正上方A位置处有一个小球,小球从静止开始下落,在B位置接触弹簧的上端,在C位置小球所受弹力大小等于重力,在D位置小球速度减小到零。关于小球下落阶段,下列说法中正确的是( )

A . 在B位置小球动能最大
B . 在C位置小球动能最大
C . 从A→C位置小球重力势能的减少量小于小球动能的增加量
D . 从A→D位置小球重力势能的减少量等于弹簧弹性势能的增加量
如图所示,一轻弹簧左端固定在粗糙的水平轨道M点的竖直挡板上,质量m=0.5kg的物体紧靠在簧上但不相连接,在外力作用下物体压缩弹簧到O点静止释放,ON长为L,L=2m,木块与水平轨道间动摩擦因数  =0.25,木块到达N点时已经与弹簧分离,轨道的MN段与竖直光滑半圆轨道相切于N点。当半圆轨道半径R=2m时,木块恰好到达与圆心等高点,即速度为0。重力加速度g取10m/s2。小物块看成质点,弹簧始终处于弹性限度内,求:
=0.25,木块到达N点时已经与弹簧分离,轨道的MN段与竖直光滑半圆轨道相切于N点。当半圆轨道半径R=2m时,木块恰好到达与圆心等高点,即速度为0。重力加速度g取10m/s2。小物块看成质点,弹簧始终处于弹性限度内,求:
=0.25,木块到达N点时已经与弹簧分离,轨道的MN段与竖直光滑半圆轨道相切于N点。当半圆轨道半径R=2m时,木块恰好到达与圆心等高点,即速度为0。重力加速度g取10m/s2。小物块看成质点,弹簧始终处于弹性限度内,求: 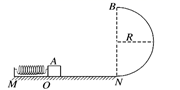
-
(1) 释放物体时,弹簧弹性势能的大小;
-
(2) 如果要使物体恰好能够过半圆轨道最高点,半圆弧轨道半径应等于多少。
我国海军现已形成“辽宁舰”和“山东舰”双航母战斗群,为进一步提升战力,科研工作者正在积极探索隐身无人攻击机上舰这一课题。假设一质量为m的隐身无人攻击机在陆地专用跑道上由静止开始匀加速滑行,滑行过程中所受阻力为其重力的k倍,当滑行距离为L时达到速度  。已知重力加速度为g,则此时无人攻击机发动机的功率为( )
。已知重力加速度为g,则此时无人攻击机发动机的功率为( )
。已知重力加速度为g,则此时无人攻击机发动机的功率为( )
A .  B .
B .  C .
C .  D .
D . 
B .
C .
D .
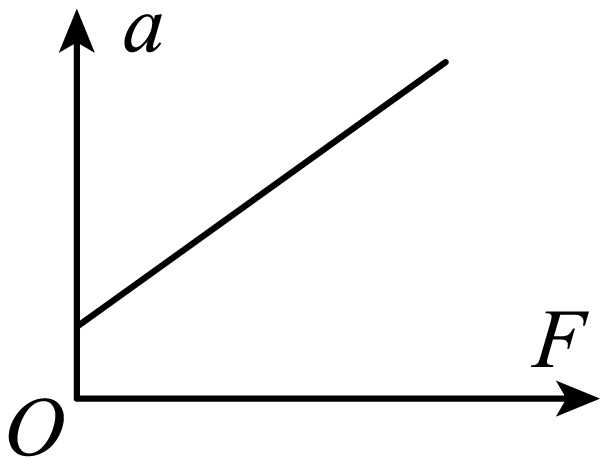
物体A、B均静止在同一水平面上,它们的质量分别为mA、mB , 与水平面间的动摩擦因数分别为  、
、  ,用平行于水平面的拉力F分别拉物体A、B,所得加速度a与拉力F的关系图像如图所示,重力加速度为g,最大静摩擦力等于滑动摩擦力,下述中正确的是( )
,用平行于水平面的拉力F分别拉物体A、B,所得加速度a与拉力F的关系图像如图所示,重力加速度为g,最大静摩擦力等于滑动摩擦力,下述中正确的是( )
、 ,用平行于水平面的拉力F分别拉物体A、B,所得加速度a与拉力F的关系图像如图所示,重力加速度为g,最大静摩擦力等于滑动摩擦力,下述中正确的是( ) 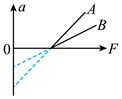
A . mA>mB
B . =
C . A受到的滑动摩擦力等于B受到的滑动摩擦力
D . 图线的函数表达式为 
=
C . A受到的滑动摩擦力等于B受到的滑动摩擦力
D . 图线的函数表达式为
如图甲所示为风洞实验示意图,实验中可以产生大小可调节的风力,现将一套有小球的固定细直杆放入风洞实验室,小球孔径略大于杆的直径,杆足够长,杆与水平方向的夹角为θ,小球与杆间的动摩擦因数为 ,且  ,现将小球静止释放,风对小球的作用力方向与杆垂直。调节风力大小使小球速度图像如图乙。下列说法正确的是( )
,现将小球静止释放,风对小球的作用力方向与杆垂直。调节风力大小使小球速度图像如图乙。下列说法正确的是( )
,且 ,现将小球静止释放,风对小球的作用力方向与杆垂直。调节风力大小使小球速度图像如图乙。下列说法正确的是( ) 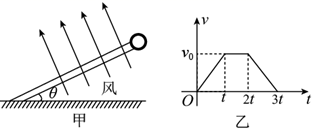
A . 0~t时间段,风对小球的作用力可能为F=  B . t~2t时间段,风对小球的作用力可能为F=
B . t~2t时间段,风对小球的作用力可能为F=  C . 2t~3t时间段,风对小球的作用力可能为F=
C . 2t~3t时间段,风对小球的作用力可能为F=  D . 整个过程中,最大与最小风力的差为
D . 整个过程中,最大与最小风力的差为 
B . t~2t时间段,风对小球的作用力可能为F=
C . 2t~3t时间段,风对小球的作用力可能为F=
D . 整个过程中,最大与最小风力的差为
在实验室用如图1所示的装置探究加速度与力的关系,在进行实验前已经通过垫块调节木板左端高度平衡了摩擦力。
-
(1) 进行实验测量时,第一次打出的一条纸带如图2所示,需要对实验装置进行改进的操作是;

-
(2) 改进后再次实验,选取纸带的一段进行测量,如图3所示,测得
 。已知打点计时器打点周期为
。已知打点计时器打点周期为  ,则小车的加速度
,则小车的加速度 
 ;(结果保留两位有效数字)
;(结果保留两位有效数字) 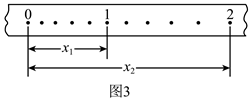
-
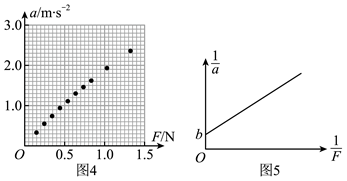
(3) 实验中保持小车质量不变,改变砝码的质量,进行实验,打出纸带,算出相应的加速度a,数据如下表所示,请在图4中根据描出的点作出图像;由图像可得出的结论是;
小车质量为428g
加速度

0.33
0.55
0.74
0.94
1.11
1.30
1.46
1.62
1.93
2.36
托盘及砝码总重力

0.147
0.245
0.343
0.441
0.539
0.637
0.735
0.833
1.029
1.323
-
(4) 某小组在实验中作出
 图像如图5所示,图像斜率的物理意义是;若图像纵截距为b,则
图像如图5所示,图像斜率的物理意义是;若图像纵截距为b,则 
 。(结果保留两位小数)
。(结果保留两位小数)
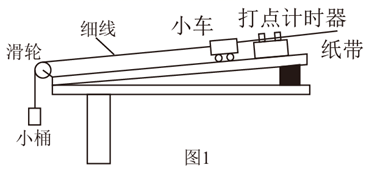
利用如图1所示装置进行“探究合外力一定时物体的加速度与质量之间的关系”的实验。
-
(1) 实验装置需要对小车进行平衡摩擦力.其目的是使细线的拉力为打点计时器纸带小车做匀加速运动的合外力。
实验中小桶质量m和小车质量M之间应满足的关系为。
-
(2) 保持小桶质量m和其他条件不变,只改变小车质量M,多次实验小师口测出相应加速度大小a,记录在下列表格中:
次数
1
2
3
4
5
6
质量

0.25
0.30
0.35
0.40
0.45
0.50
加速度

0.39
0.32
X
0.24
0.22
0.19
质量倒数

4.0
3.3
2.9
2.5
2.2
2.0
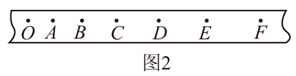
其中,在第3次实验中,忘记了记录加速度X的数值,该次实验的部分纸带如题图2所示,O、A、B、C、D、E、F为7个连续的计数点,相邻两计数点间还有四个实际打点未画出,打点计时器的打点频率为
 ,测得A、B、C、D、E、F与O点间距分别为
,测得A、B、C、D、E、F与O点间距分别为  ,可计算加速度的数值
,可计算加速度的数值  。
。
-
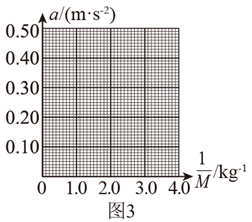
(3) 在如题图3所示坐标纸上,根据表格数据描点,并作出图线,得出实验结论:。
一个足球放在一块长木板上,如图所示,木板和足球均发生了弹性形变,关于它们弹力的情况,以下说法正确的是( )

A . 足球产生的弹力作用在足球上
B . 足球受到的支持力是由于木板发生弹性形变而产生的弹力
C . 足球先对木板产生压力,木板后对足球产生支持力
D . 足球对木板的压力就是足球受到的重力
弹簧劲度系数k的单位为 , 用国际单位制基本单位的符号来表示,正确的是( )
, 用国际单位制基本单位的符号来表示,正确的是( )
, 用国际单位制基本单位的符号来表示,正确的是( )
A . kg/s
B .  C .
C .  D .
D . 
C .
D .
如图,MPQO为有界的竖直向下的匀强电场,电场强度为E,ACB为光滑固定的半圆形轨道,圆轨道半径为R,AB为圆水平直径的两个端点,AC为 圆弧。一个质量为m,电荷量为
圆弧。一个质量为m,电荷量为 的带电小球,从A点正上方高为H处由静止释放,并从A点沿切线进入半圆轨道,关于带电小球的运动情况,下列说法正确的是( )
的带电小球,从A点正上方高为H处由静止释放,并从A点沿切线进入半圆轨道,关于带电小球的运动情况,下列说法正确的是( )
圆弧。一个质量为m,电荷量为的带电小球,从A点正上方高为H处由静止释放,并从A点沿切线进入半圆轨道,关于带电小球的运动情况,下列说法正确的是( )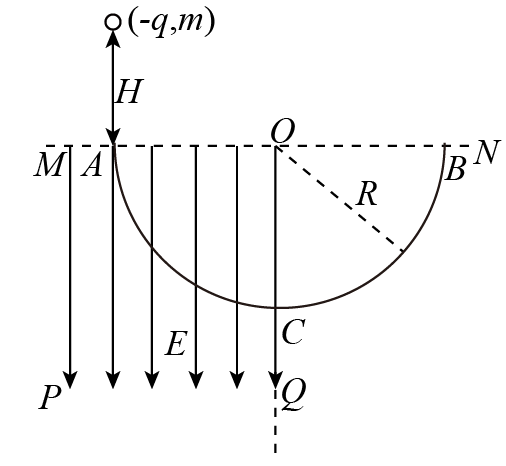
A . 小球到达C点的速度不可能为零
B . 小球在AC部分对圆弧轨道的压力大小可能不变
C . 若小球能从B点离开,上升的高度一定小于H
D . 小球只要能过C点,就一定能过B点
如图甲所示,用起重机起吊质量为m的重物,重物上升过程中速度的平方v2与上升高度h的关系图像如图乙所示,重力加速度为g,则重物上升过程中,下列说法正确的是( )
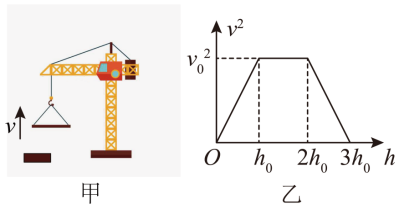
A . 重物加速上升的时间为 B . 起重机对重物做功的最大瞬时功率为
B . 起重机对重物做功的最大瞬时功率为 C . 重物上升过程中,克服重力做功的平均功率为
C . 重物上升过程中,克服重力做功的平均功率为 D . 重物加速上升时,起重机对重物做正功,减速上升时,起重机对重物做负功
D . 重物加速上升时,起重机对重物做正功,减速上升时,起重机对重物做负功
B . 起重机对重物做功的最大瞬时功率为
C . 重物上升过程中,克服重力做功的平均功率为
D . 重物加速上升时,起重机对重物做正功,减速上升时,起重机对重物做负功
如图所示,固定在竖直平面内半径为R的四分之一圆弧轨道与水平轨道相切于最低点B,质量为m的小物块(视为质点)从圆弧轨道的顶端A点由静止滑下,经过B点后滑上水平轨道,最后停在C点。若B、C两点间的距离为 , 物块与两轨道间的动摩擦因数均为
, 物块与两轨道间的动摩擦因数均为 , 重力加速度大小为g,则物块到达B点前瞬间受到的摩擦力大小为( )。
, 重力加速度大小为g,则物块到达B点前瞬间受到的摩擦力大小为( )。
, 物块与两轨道间的动摩擦因数均为 , 重力加速度大小为g,则物块到达B点前瞬间受到的摩擦力大小为( )。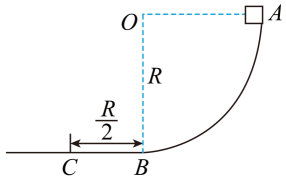
A .  B .
B .  C .
C .  D .
D . 
B .
C .
D .
某同学欲利用如图所示的装置探究质量一定时,加速度与合力的关系,其中A为滑块,B为电火花计时器,C为力传感器(可以测量细绳的拉力大小),D为一端带有定滑轮的气垫导轨,E为小桶,小桶系在轻小动滑轮的下端,可装砂,动滑轮两侧的细绳竖直。主要实验步骤如下:
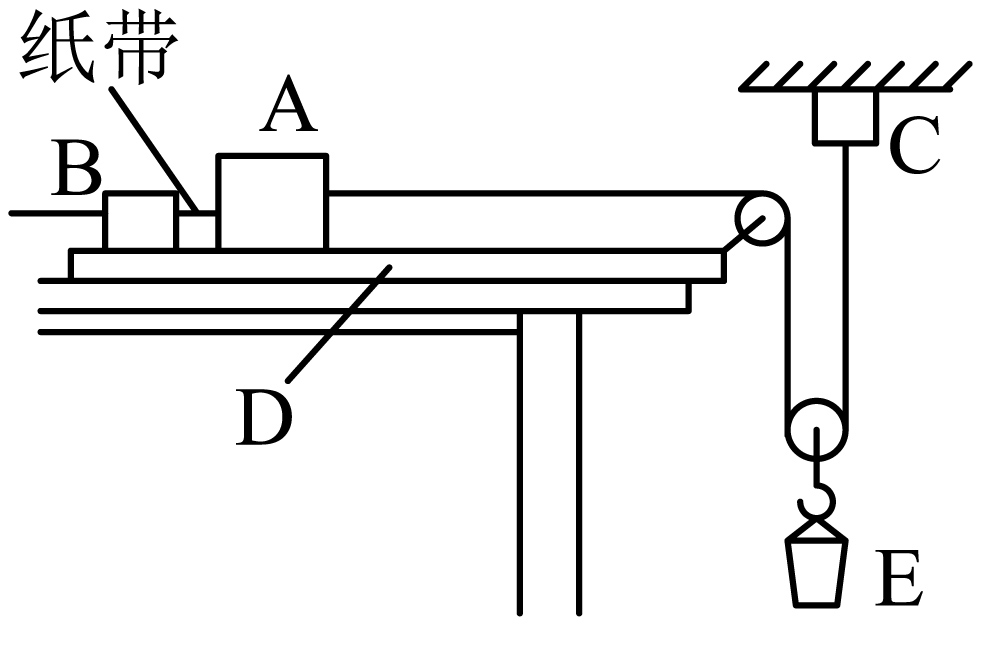
①正确安装好实验器材,气垫导轨正常工作,接通电火花计时器的电源后由静止释放滑块,滑块向右运动,读出力传感器的示数,取下纸带,计算出滑块的加速度大小;
②增加小桶中砂的质量,重复步骤①,获得多组力传感器的示数F和滑块的加速度大小a的数据,以a为纵坐标、F为横坐标,用描点法画出 图像。
图像。
-
(1) 在步骤①中,关于气垫导轨的调节,下列做法正确的是____。(填正确答案标号)A . 气垫导轨调成水平 B . 气垫导轨左端垫高,以平衡摩擦力 C . 气垫导轨右端垫高,以平衡摩擦力
-
(2) 在步骤②中,增减小桶中砂的质量时,小桶与砂的总质量(填“一定远小于”、“一定等于”或“可能大于”)滑块的质量。
-
(3) 按正确操作进行实验,下列图像可能正确的是____。
A .
 B .
B . 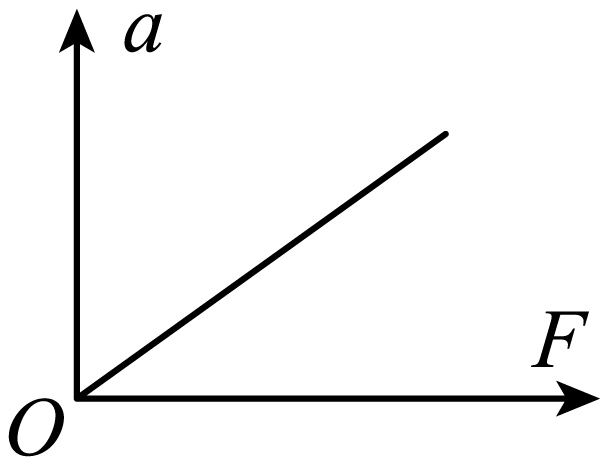 C .
C . 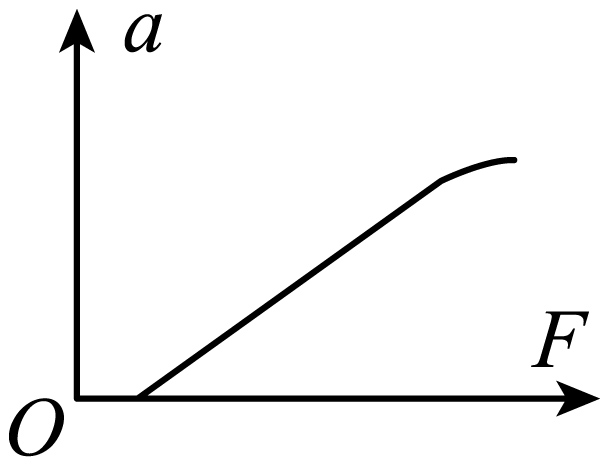
-
(4) 将滑块从图示位置由静止释放,在滑块向右运动的过程中,小桶的加速度大小
 与滑块的加速度大小
与滑块的加速度大小 间的关系为
间的关系为 。
。
下列物理量的值均为“ ”,其负号表示大小的是( )
”,其负号表示大小的是( )
”,其负号表示大小的是( )
A . “ ”的功
B . “”的重力势能
C . “
”的功
B . “”的重力势能
C . “ ”的摩擦力
D . “
”的摩擦力
D . “ ”的电荷量
”的电荷量
”的功
B . “”的重力势能
C . “”的摩擦力
D . “”的电荷量
如图所示,足球在地面1的位置被踢出后落到地面3的位置,2为空中达到的最高点,则足球( )
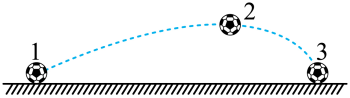
A . 经过位置2时,重力的功率最大
B . 由位置1运动到位置3过程中,合力做功为0
C . 由位置1运动到位置2、位置2运动到位置3的两个过程中重力势能变化相同
D . 由位置1运动到位置2的时间小于由位置2运动到位置3的时间
如图所示, 段为粗糙水平轨道,
段为粗糙水平轨道, 段是固定于竖直平面内的粗糙半圆形轨道,半径为
段是固定于竖直平面内的粗糙半圆形轨道,半径为 , 两轨道在B点平滑连接.一质量为
, 两轨道在B点平滑连接.一质量为 的滑块(滑块大小远小于半圆半径)静止在A点,在水平恒力
的滑块(滑块大小远小于半圆半径)静止在A点,在水平恒力 作用下从A点向右运动,当运动至B点时,撤去恒力
作用下从A点向右运动,当运动至B点时,撤去恒力 , 此时滑块对轨道的压力大小为
, 此时滑块对轨道的压力大小为 , 滑块沿半圆形轨道向上运动恰能通过最高点
, 滑块沿半圆形轨道向上运动恰能通过最高点 , 最终物体落回水平轨道上。已知滑块与水平轨道间的动摩擦因数为
, 最终物体落回水平轨道上。已知滑块与水平轨道间的动摩擦因数为 , 不计空气阻力。(
, 不计空气阻力。( )求:
)求:
段为粗糙水平轨道,段是固定于竖直平面内的粗糙半圆形轨道,半径为 , 两轨道在B点平滑连接.一质量为的滑块(滑块大小远小于半圆半径)静止在A点,在水平恒力作用下从A点向右运动,当运动至B点时,撤去恒力 , 此时滑块对轨道的压力大小为 , 滑块沿半圆形轨道向上运动恰能通过最高点 , 最终物体落回水平轨道上。已知滑块与水平轨道间的动摩擦因数为 , 不计空气阻力。()求:![]()
-
(1) 水平轨道的长度
 。
。
-
(2) 滑块从B到的过程中摩擦力所做的功。
-
(3) 物体落到水平轨道瞬间的速度大小。
最近更新
- 常见的物质中,不属于混合物的是() A.矿泉水 B.洁净的空气 C.干冰 D.加碘食盐
- 右图1表示“M与N为并列关系”,右图2表示“M与N为从属关系”。下列概念间的关系,符合右图3所示关系的是 X Y Z
- (08年调研一文) 设那么“”是“”的( ) A.充分不必要条件
- 在如图甲所示的电路中,电源电压为6V且保持不变,滑动变阻器R1标有“100Ω,2A”字样,闭合开关S后,电流表A1A的示
- 某同学将光亮的镁条放入盛有NH4Cl溶液的试管中,有大量气泡产生。为探究该反应原理,该同学做了以下试验并观察到相关现象,
- 25.----Why don’t we choose that road to save time? ----The
- 关于新疆牧区的叙述,正确的是( ) A.新疆牧区是滩羊、细毛羊所生活的牧区 B.新疆牧民满足生产、生活需要,应大力
- 质粒是基因工程中最常用的运载体,它的主要特点是() ①能自我复制 ②不能自我复制 ③结构很小 ④成分是蛋白质 ⑤环状RN
- 某地的东面是东半球,西面是西半球,南面是南半球,北面是北半球,该地的经纬度是( ) A、西经20°,纬度是0° B
- 近年来,福建省各地方政府执行《中华人民共和国物价法》规定,在对居民生活用电、用水、民用管道天然气、公办学校的小学、初中杂
- 下列既有离子键又有共价键的化合物是() A. NaCl B. Na2O C. CaF2 D. Na2O
- 右图所示,东东在探究光的色散现象时,看到白光经三棱镜后,光屏上自上而下出现了红、橙、黄、绿、蓝、靛、紫的色带。东东对产生
- 下列各图所示细胞均来自同一生物体,则下列叙述中错误的是 ()A.图①和图②可能来自同一初级精母细胞 B.精子的形成过程应
- 明明在做探究“串、并联电路中的电流规律”的实验中,设计了如图所示的电路图。(1)在探究实验前,开关应处于________
- (08山东二模)下列是芳香族化合物A、B、C、D、E的转化关系,其中A、E分子式分别是C9H8O和C9H8O2,E分子中
- 有四瓶失去标签的溶液,它们分别是:①CuCl2溶液、②稀盐酸、③硫酸钠溶液、④氢氧化钠溶液,不用其他试剂就可以将它们加以
- 研究者给家兔注射一种可以特异性破坏胰岛B细胞的药物——链脲佐菌素(STZ)进行血糖调节研究。为了准确判断STZ是否成功破
- 定义在R上的函数 时, A.
- R、X、Y和Z是四种元素,其常见化合价均为+2价,且X2+与单质R不反应:X2++Z=X+Z2+;Y+Z2+=Y2++Z
- 下列粒子中: 其核外电子数相同的是A.①



