5 多普勒效应 知识点题库
一渔船向鱼群发出超声波,若鱼群正向渔船靠近,则被鱼群反射回来的超声波与发出的超声波相比( )
A . 波速变大
B . 波速不变
C . 频率变高
D . 频率不变
关于多普勒效应,下列说法正确的是( )
A . 产生多普勒效应的原因是波源频率发生了变化
B . 产生多普勒效应的原因是观察者或波源发生运动
C . 甲、乙两列车相向行驶,两车均鸣笛,且所发出的笛声频率相同,那么乙车中的某旅客听到的甲车笛声频率低于他听到的乙车笛声频率
D . 假设某观测站接收到某星系发出光的波长在逐渐变长,这说明该星系正在远离我们而去
该图表示的是( )
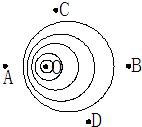
A . 干涉现象
B . 衍射现象
C . 反射现象
D . 多普勒效应
蒸汽火车汽笛发声要消耗内能,设蒸汽机将功率为P1的热功率用于汽笛发声时,发出的声音功率为P2 , 汽笛发声频率为500Hz,而在车站的人听得汽笛的频率为520Hz,则下列结论正确的是( )
A . 火车向车站驶来
B . 火车远离车站驶去
C . P1可能小于P2
D . P1可能等于P2
正在铁路边工作的工人,听到一列火车的汽笛声,发现汽笛声的音调越来越高,这种现象在物理学中叫,由此可判断这列火车正在(选填“背离”、“向着”)他行驶.
下列说法正确的是( )
A . 多普勒效应是声波特有的现象
B . 如果地球表面没有大气层,太阳照亮地球的范围要比有大气层时略大些
C . 激光雷达能根据多普勒效应测出目标的运动速度,从而对目标进行跟踪
D . 从本质上说,红外线、紫外线、X射线、γ射线都是电磁波
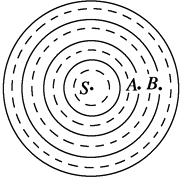
如图所示为由波源S发出的波某一时刻在介质平面中的情形,实线为波峰,虚线为波谷,设波源频率为20Hz,且不运动,而观察者在1s内由A运动到B,观察者接收到个完全波.
关于波下列说法正确的有( )
A . 用光导纤维束传送信息是光的全反射的应用
B . 白光通过三棱镜在屏上出现彩色条纹是光的一种干涉现象
C . 波源匀速靠近一静止的接收者,接收者接收到的频率比波源的频率高
D . 露珠的晶莹透亮现象,是由光的全反射引起的
E . 对于发生干涉现象的两列波,它们的振幅一定相同
下列说法中正确的是( )
A . 医学上检查人体内部器官的“CT”,使用的是γ射线
B . 雨后公路积水表面漂浮的油膜阳光下呈现彩色,这是光的折射现象
C . 利用多普勒效应原理,可以测量运动物体的速度
D . 考虑相对论效应,静止的人测量沿自身长度方向高速运动的杆比静止时的杆长
下列关于机械波和电磁波的说法中正确的是( )
A . 电磁波和机械波都能产生干涉、衍射和多普勒效应现象
B . 波源停止振动,机械波立即停止传播,电磁波能继续传播
C . 机械波和电磁波由一种介质进入另一种介质传播时,波速保持不变
D . 机械波和电磁波由一种介质进入另一种介质传播时,波长保持不变
下列说法正确的是( )
A . 变化的磁场激发电场,变化的电场激发磁场
B . 电磁波和机械波都能传递能量和信息
C . 红光的频率低于紫光的频率,在真空中红光的传播速度大于紫光的传播速度
D . 若在地球上接收到来自某遥远星球的光波的频率变低,则可判断该星球正在离我们远去
下列物理现象:①闻其声而不见其人;②当正在鸣笛的火车向着我们急驶而来时,我们听到音调变高。这两种现象分别属于声波的( )
A . 衍射、多普勒效应
B . 干涉、衍射
C . 共振、干涉
D . 衍射、共振
关于波的现象,下列说法正确的是( )
A . 交通警察利用测速仪向行进中的车辆发射频率已知的超声波,根据反射波的频率变化判断车速,这是利用了波的多普勒效应
B . “闻其声不见其人”是声波的反射现象
C . 医生向人体内发射频率已知的超声波,根据接收到的被血管中的血流反射后的超声波的频率变化,判断血流的速度是利用波的干涉现象
D . 夏日雷声轰鸣不绝,这是声波的衍射现象
两辆汽车甲与乙,在  时刻,分别距十字路O处的距离为
时刻,分别距十字路O处的距离为  和
和  。两车分别以速率
。两车分别以速率  和
和  沿水平的、相互正交的公路匀速前进,如图所示。汽车甲持续地以固定的频率
沿水平的、相互正交的公路匀速前进,如图所示。汽车甲持续地以固定的频率  鸣笛,则在任意时刻t汽车乙的司机所检测到的笛声频率将如何变化(已知声速为u,且有
鸣笛,则在任意时刻t汽车乙的司机所检测到的笛声频率将如何变化(已知声速为u,且有  、
、  )( )
)( )
时刻,分别距十字路O处的距离为 和 。两车分别以速率 和 沿水平的、相互正交的公路匀速前进,如图所示。汽车甲持续地以固定的频率 鸣笛,则在任意时刻t汽车乙的司机所检测到的笛声频率将如何变化(已知声速为u,且有 、 )( ) 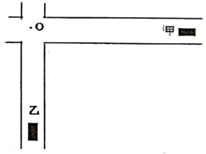
A . 当两车均向O运动(在到达O之前)时,观察者接收到的频率一定比波源发出的频率低
B . 当两车均向O运动(在到达O之前)时,观察者接收到的频率可能等于波源发出的频率
C . 当两车均向远离O的方向运动时,观察者接收到的频率一定比波源发出的频率低
D . 当两车均向远离O的方向运动时,观察者接收到的频率一定比波源发出的频率高
下列说法中正确的是 ( )
A . 发生多普勒效应时,波源的频率变化了
B . 发生多普勒效应时,观察者接收的频率发生了变化
C . 多普勒效应是在波源和观察者之间有相对运动时产生的
D . 多普勒效应是由奥地利物理学家多普勒首先发现的
汽车无人驾驶技术已逐渐成熟,最常用的是ACC自适应巡航控制系统,它可以控制无人车在前车减速时自动减速、前车加速时自动跟上去。其使用的传感器主要是毫米波雷达,该雷达会发射和接收调制过的无线电波,再通过因波的时间差和多普勒效应造成的频率变化来测量目标与雷达的相对距离和相对速度。若该雷达发射的无线电波的频率为f,接收到的回波的频率为f',则 ( )
A . 当f=f'时,表明前车与无人车速度相同
B . 当f=f'时,表明前车一定处于静止状态
C . 当f'>f时,表明前车在加速行驶
D . 当f'<f时,表明前车在减速行驶
根据高中物理所学知识,分析下列生活中的物理现象:①闻其声而不见其人;②钢琴声震碎玻璃酒杯;③当正在鸣笛的火车向着我们疾驰而来时,我们听到汽笛声的音调变高;④两列水波相遇产生稳定花纹。这些物理现象分别属于( )
A . 干涉、衍射、多普勒效应、共振
B . 折射、多普勒效应、共振、干涉
C . 衍射、共振、多普勒效应、干涉
D . 衍射、共振、折射、多普勒效应
下列说法正确的是( )
A . 当水波通过障碍物时,若障碍物的尺寸比波长大得多时,将发生明显的衍射现象
B . 刮胡须的刀片的影子边缘模糊不清是光的衍射现象
C . 火车鸣笛向我们驶来时,我们听到的鸣笛声频率将比声源发声的频率高
D . 在干涉现象中,振动加强点的位移总比减弱点的位移要大
下列说法中正确的是( )
A . 机械波的频率等于波源的振动频率,与介质无关
B . 在双缝干涉实验中,仅把紫光换成红光后,条纹间距会增大
C . 爱因斯坦狭义相对论指出,真空中的光速在不同的惯性参考系中是不同的
D . 根据麦克斯韦电磁场理论,电磁波中的电场和磁场互相垂直,电磁波是横波
E . 多普勒红移现象表示宇宙正在膨胀,是因为我们接收到的遥远恒星发出的光比恒星实际发光频率偏大
高铁进站过程中,声音越来越尖锐,其原因是:当声源靠近人时,单位时间被人接收的声波的个数(选填“大于”“小于”或“等于”)声源静止时的,导致人接收到的声音的(选填“频率”“周期”或“波长”)变大。
最近更新
- 1971年尼克松宣称:美国将不接受以美元兑换黄金,外国人可以任意处置美元,外国银行家可以任意决定美元价值。这表明 A
- 户外遇到雷雨天气时,以下做法正确的是A.躲在大树下避雨
- 某初级中学有学生人,其中一年级人,二、三年级各人,现要利用抽样方法取人参加某项调查,考虑选用简单随机抽样、分层抽样和系统
- 如图,AB//CD,EF⊥AB于E,EF交CD于F,已知∠1=63°,则∠2=( )A.63°B.53°C.37°
- 下列有关基因工程的叙述中,正确的是 A.限制性核酸内切酶只有在获得目的基因时才用 B.重组DNA的形成是在细胞内完成的
- The global economic slowdown _______ millions of migrant wor
- 若CH2=CH2分子中的4个H原子全部被—CH3取代,生成,则关于该结构的下列说法正确的是 A.所有原子一定在同一平面
- 已知函数f(x)=sin(ωx+φ) 的最小正周期为π. (1)求当f(x)为偶函数时φ的值; (2)若f(x)的图像过
- 设有10把各不相同的钥匙,其中只有一把能打开某间房门.由于不知道哪一把是这间房门的钥匙,从而只好将这些钥匙逐个试一试.如
- 以洋葱根尖为实验材料,观察植物细胞的有丝分裂。 (1)培养洋葱根尖时,如果没有经常换水,常会出现烂根现象,原因是____
- 2010年3月14日,国务院总理温家宝在回答中外记者提问时讲了一个故事:元朝有一位画家画了一幅著名的《富春山居图》。几百
- 1.下列各句划线成语的使用,全部正确的一项是( ) ①人们对于十二家全国人大常委会“不得设立实施义务教育的营利性民办
- 请用自己的话概括下面文字所表达的观点,不超过15个字。 香港大学的校徽,镌刻着“明德格物”四个字。“明德”和“格物”
- (04广东卷)取生长健壮的小麦根尖,经过解离、漂洗、染色、制片过程,制成临时装片,放在显微镜下观察。欲观察到细胞有丝分裂
- 已知点A B都在反比例函数的图像上,则 。
- -6的相反数是 .
- (08年杨浦区测试) 已知 (>0 ,)是R上的增函数,那么的取值范围是 .
- 诗词是民族灿烂文化的瑰宝.下列著名诗句中只含有物理变化的是A.野火烧不尽,春风吹又生 B.粉身碎骨浑不怕
- 人体剧烈运动时,肌肉产生的大量乳酸进入血液,但不会引起血浆pH发生剧烈的变化。其中发挥缓冲作用的物质主要是
- 如图6-1所示,具有初速度的物块,在沿倾角为30°、粗糙的斜面向上运动的过程中,受一个恒定的沿斜面向上的拉力F作用,这时



