2.功 知识点题库
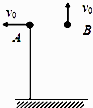
在水平匀强电场中,将两个不计重力的带电小球M和N分别沿图示路径移动到同一水平线上的不同位置,释放后,M,N保持静止,则( )
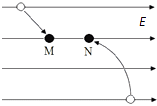
A . M的带电量比N的大
B . M带正电荷、N带负电荷
C . 移动过程中匀强电场对M做负功
D . 移动过程中匀强电场对N做正功
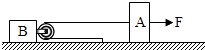
水平地面上有质量分别为m和4m的物A和B,两者与地面的动摩擦因数均为μ.细绳的一端固定,另一端跨过轻质动滑轮与A相连,动滑轮与B相连,如图所示.初始时,绳处于水平拉直状态.若物块A在水平向右的恒力F作用下向右移动了距离s,重力加速度大小为g.求
-
(1) 物块B克服摩擦力所做的功;
-
(2) 物块A、B的加速度大小.
一个质量为2kg的滑块以4m/s的速度在光滑的水平面上向左匀速滑行,从某一时刻起,在滑块上施加了一个向右的水平力,经过一段时间后,滑块反向运动且速度大小为仍为4m/s,则在这段时间里水平力所做的功为( )
A . 0
B . 8J
C . 16J
D . 32J
在倾角为θ的光滑斜面上有两个用轻弹簧连接的物块A和B,它们的质量分别为3m和2m,弹簧的劲度系数为k,C为一固定挡板,系统处于静止状态.现用一沿斜面方向的恒力拉物块A使之沿斜面向上运动,当B刚离开C时,A的速度为v,加速度方向沿斜面向上、大小为a,则( )
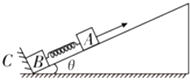
A . 从静止到B刚离开C的过程中,A发生的位移为  B . 从静止到B刚离开C的过程中,重力对A做的功为
B . 从静止到B刚离开C的过程中,重力对A做的功为  C . B刚离开C时,恒力对A做功的功率为(5mgsinθ+2ma)v
D . 当A的速度达到最大时,B的加速度大小为
C . B刚离开C时,恒力对A做功的功率为(5mgsinθ+2ma)v
D . 当A的速度达到最大时,B的加速度大小为 
B . 从静止到B刚离开C的过程中,重力对A做的功为
C . B刚离开C时,恒力对A做功的功率为(5mgsinθ+2ma)v
D . 当A的速度达到最大时,B的加速度大小为
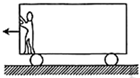
如图所示,站在平板卡车上的人用水平力F推车,脚对车的静摩擦力向后为Ff , 则下列说法中正确的是( )
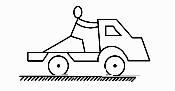
A . 当车匀速前进时,F和Ff对车做的功代数和为零
B . 当车加速前进时,F和Ff对车做的功代数和为正值
C . 当车减速前进时,F和Ff对车做的功代数和为正值
D . 不管车如何运动,F和Ff对车做的功代数和均为零
如图所示,两个完全相同的小球A、B,在同一高度处以相同大小的初速度v0 分别水平抛出和竖直向上抛出,下列说法正确的是( )
A . 两小球落地时的速度相同
B . 两小球落地时,重力的瞬时功率相同
C . 从开始运动至落地,重力对两小球做功不同
D . 从开始运动至落地,重力对两小球做功的平均功率不同
放在水平面上的物体在拉力F作用下做匀速直线运动,先后通过A、B两点,在这个过程中( )
A . 物体的运动速度越大,力F做功越多
B . 不论物体的运动速度多大,力F做功不变
C . 物体的运动速度越大,力F做功的功率越大
D . 物体的运动速度越大,力F做功的功率不变
如图甲所示,质量为2m的长木板静止地放在光滑的水平面上,另一质量为m的小铅块(可视为质点)以水平速度v0滑上木板的左端,恰能滑至木板的右端且与木板保持相对静止,铅块在运动过程中所受到的摩擦力始终不变.若将木板分成长度与质量均相等(即m1=m2=m)的两段1、2后,将它们紧挨着放在同一水平面上,让小铅块以相同的初速度v0由木板1的左端开始运动,如图乙所示,则下列说法正确的是( )
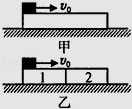
A . 小铅块滑到木板2的右端前就与之保持相对静止
B . 小铅块滑到木板2的右端后与之保持相对静止
C . 甲、乙两图所示的过程中产生的热量相等
D . 图甲所示的过程产生的热量大于图乙所示的过程产生的热量
一个人用力把一个质量为1㎏的物体,由静止向上提起1m时,物体的速度为2m/s,则在此过程中,下列说法正确的是( )
A . 手对物体做的功为12J
B . 合外力对物体做的功为2J
C . 合外力对物体做的功伟12J
D . 物体克服重力做的功为10J
如图,物体受到的两相互垂直的力F1、F2对物体做功大小分别为6 J和8 J,则这两力的合力对物体所做的功的大小为( )
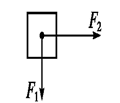
A . 6 J
B . 8 J
C . 10 J
D . 14 J
如图所示,人站在电动扶梯的水平台阶上,假定人与扶梯一起沿斜面加速上升,在这个过程中,人脚所受的静摩擦力( )
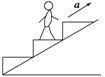
A . 等于零,对人不做功
B . 水平向左,对人做负功
C . 水平向右,对人做正功
D . 沿斜面向上,对人做正功
如图甲所示,物体受到水平推力F的作用在粗糙水平面上做直线运动。监测到推力F、物体速度v随时间t变化的规律如图所示。取g=10m/s2 , 则( )

A . 物体质量为1.5Kg
B . 第2s内物体克服摩擦力做的功为W=2.0J
C . 第1.5s时摩擦力f的功率大小为2W
D . 第2s内推力F做功的平均功率  =1.5W
=1.5W
=1.5W
如图所示,在水平向左匀速行驶的车厢中,站在车内的人用力沿车前进的方向推车厢,已知人与车厢始终保持相对静止。则下列分析正确的是( )
A . 人对车厢的作用力不做功
B . 人对车厢的作用力做正功
C . 车厢对人的作用力做正功
D . 车厢对人的作用力做负功
如图所示,绷紧的传送带在电动机的带动下,始终保持  的速度匀速运行,传送带与水平地面平行。现将质量为
的速度匀速运行,传送带与水平地面平行。现将质量为  的某物块由静止释放在传送带上的右端,过一会儿物块能保持与传送带相对静止,设物块与传送带间的动摩擦因数为
的某物块由静止释放在传送带上的右端,过一会儿物块能保持与传送带相对静止,设物块与传送带间的动摩擦因数为  ,取
,取  ,对于物块从静止释放到相对静止这一过程( )
,对于物块从静止释放到相对静止这一过程( )
的速度匀速运行,传送带与水平地面平行。现将质量为 的某物块由静止释放在传送带上的右端,过一会儿物块能保持与传送带相对静止,设物块与传送带间的动摩擦因数为 ,取 ,对于物块从静止释放到相对静止这一过程( ) 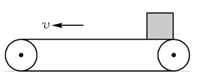
A . 物块受到的摩擦力对它做的功为  B . 带动传送带的电动机增加的功率为
B . 带动传送带的电动机增加的功率为  C . 水平传送带克服摩擦力做的功为
C . 水平传送带克服摩擦力做的功为  D . 带动传送带的电动机多做的功为
D . 带动传送带的电动机多做的功为 
B . 带动传送带的电动机增加的功率为
C . 水平传送带克服摩擦力做的功为
D . 带动传送带的电动机多做的功为
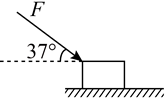
如图所示,一个质量m=2kg的物体静止在水平地面上,现施加一个大小为10N方向与水平方向成37°角斜向下的推力F,使其在水平地面上移动了距离s=2m;撤去推力,物体又滑行了一段距离后停止运动。(设物体与地面间的动摩擦因数μ=0.25,sin37°=0.6,cos37°=0.8.)求:
-
(1) 推力F对物体做的功;
-
(2) 撤去拉力F时物体的动能;
-
(3) 全过程中摩擦力对物体做的功。
如图所示,同一物体受大小相等的力F的作用,在粗糙程度不同的水平面上发生了相等的不为零的一段位移,其中,F做功最少的是( )
A . 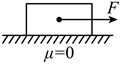 B .
B . 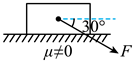 C .
C . 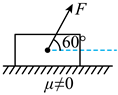 D .
D . 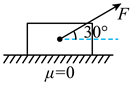
B .
C .
D .
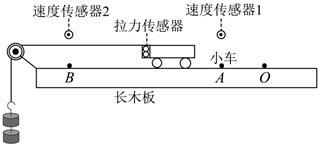
某实验小组利用拉力传感器和速度传感器探究“功与速度的关系”。如图所示,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连,用速度传感器记录通过A、B时的速度大小。小车中可以放置砝码。
-
(1) 下表是他们测得的一组数据,其中M是拉力传感器、小车与小车中砝码质量之和,
 是两个速度传感器记录速度的平方差,可以据此计算出动能变化量,F是拉力传感器受到的拉力,W是F在A、B间所作的功。表格中的
是两个速度传感器记录速度的平方差,可以据此计算出动能变化量,F是拉力传感器受到的拉力,W是F在A、B间所作的功。表格中的  ,
,  。(结果保留三位有效数字)
。(结果保留三位有效数字)
-
(2) 从数据记录表中发现
 总是小于W的原因是。
总是小于W的原因是。 数据记录表
次数
M(kg)
 (J)
(J)F(N)
W(J)
1
0.500
0.760
0.190
0.400
0.200
2
0.500
1.65
0.413
0.840
0.420
3
0.500
2.40

1.220

4
1.000
2.40
1.20
2.420
1.21
5
1.000
2.84
1.42
2.860
1.43
图甲为排球课的某个场景。小睿同学将排球从A点水平击出,排球飞到B点时,被小睿同学垫起,球向斜上方飞出后落到A点正下方且与B点等高的D点,排球运动的最高点为C,C点与A点高度相同,不计空气阻力,将排球飞行过程简化为乙图。下列说法正确的是( )
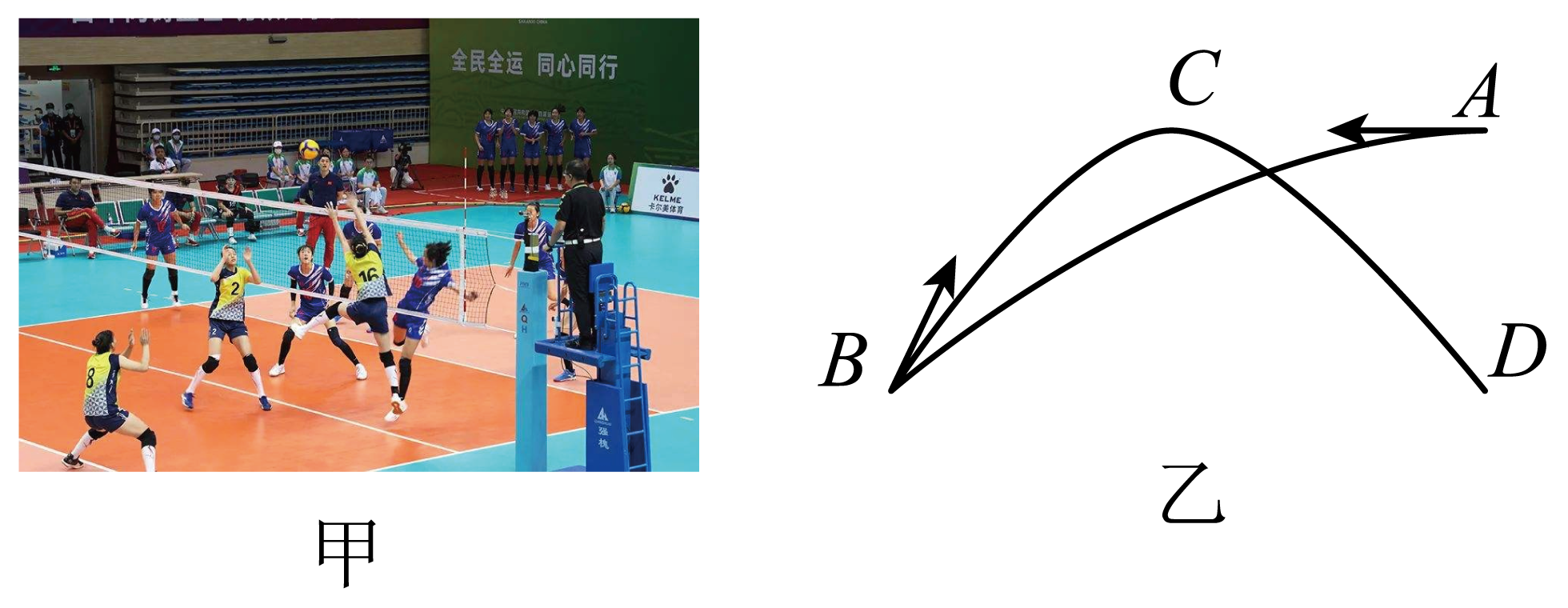
A . 排球在两次飞行过程中的时间
B . 排球到达B点的速率比离开B点的速率大
C . 排球在A点、C点两处的动能相等
D . 两次飞行过程中重力对排球做的功相等
如图所示,质量相同的可视为质点的甲、乙两小球,甲从竖直固定的1/4光滑圆弧轨道顶端由静止滑下,轨道半径为R,圆弧底端切线水平,乙从高为R的光滑斜面顶端由静止滑下.下列判断正确的是( )
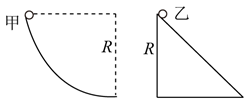
A . 两小球到达底端时速度相同
B . 两小球由静止运动到底端的过程中重力做功不相同
C . 两小球到达底端时动能相同
D . 两小球到达底端时,甲小球重力做功的瞬时功率等于乙小球重力做功的瞬时功率
如图所示,质量为M、长为L=4m的木板Q放在光滑的水平面上,可视为质点的质量为m的物块P放在木板的最左端。T=0时刻给物块水平向右的初速度,当物块P滑到木板Q的最右端时木板Q的位移为x=7m。则下列说法正确的是( )
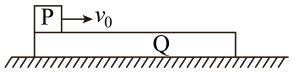
A . P、Q所受的摩擦力之比为 B . 摩擦力对P、Q所做的功的绝对值之比为
B . 摩擦力对P、Q所做的功的绝对值之比为 C . P减小的动能与P、Q间因摩擦而产生的热量之比为
C . P减小的动能与P、Q间因摩擦而产生的热量之比为 D . Q增加的动能与系统损失的机械能之比为
D . Q增加的动能与系统损失的机械能之比为
B . 摩擦力对P、Q所做的功的绝对值之比为
C . P减小的动能与P、Q间因摩擦而产生的热量之比为
D . Q增加的动能与系统损失的机械能之比为
最近更新
- “玉门关西度乌龙,天山瑶池赏观音。”闽南和新疆在茶叶陶瓷贸易方面有许多合作空间。两地人民友好往来,一条从闽南到新疆再到
- 已知:如图,长方形ABCD的长和宽分别为2和1,以D为圆心,AD为半径作AE弧,再以AB的中点F为圆心,FB长为半径作B
- 法国驻印度支那总督于1926年写道:“这场用鲜血覆盖了整个欧洲的战争……在距我们遥远的国度里唤起了一种独立的意识。……在
- 设函数f(x)=其中[x]表示不超过x的最大整数,如[-1.1]=-2,[π]=3.若直线y=kx+k(k>0)与
- 将烧碱吸收H2S后的溶液加入到如图1所示的电解池的阳极区进行电解。电解过程中阳极区发生如下反应:图1 S2--2e-==
- 下列词语中没有错别字的一项是( )。 A.蹂躏缥缈徘徊恪尽职守 B.惆怅尴尬凛冽穷困僚倒 C.彷徨伛偻涟漪顾明思
- 设是方程的两个实根,若不等式对任意实数恒成立,则实数的取值范围为 .
- 某区域平均每万元国内生产总值的碳排放量可显示区域产业CO2减排效率。读图完成6~7题。6.下列四地中节能减排任务最紧迫的
- 在质壁分离的植物细胞中,水分经过的结构依次是 ( ) A.细胞壁、细胞膜
- 1964年10月,我国取得重大科研成果是 ( ) A.第一颗原子弹试爆成功
- 穆罕默德·阿里改革 () A.维护了奴隶
- 弹簧的上端固定,下端悬挂一根质量为m的磁铁,在磁铁下端放一个固定的闭合金属线圈.将磁铁抬到弹簧原长处由静止开始释放,使磁
- 下图中,反映北美洲的地形剖面图是
- 如图所示,人造地球卫星在椭圆轨道上运动,当卫星由A点运动到B点的过程中,人造卫星的动能EK和势能EP的变化规律是A.EK
- 如图表示一个由153个氨基酸残基构成的蛋白质分子。下列叙述正确的是( )A.该分子中含有152个肽键 B.参与构成
- (1-23×)÷(-3)2
- 请以“读”为标题,写一篇作文。【注意】①立意自定;②文体自选;③不少于800字。
- 设抛物线y=x2上一点P到x轴的距离是2,则点P到该抛物线焦点的距离是() A.1 B.2 C.3 D.4
- 下列关于物体是否可以看做质点的说法正确的有 () A.研究奥运游泳冠军叶诗文的
- 在由Fe、FeO和Fe2O3组成的混合物中加入100 mL 2 mol·L-1的盐酸,恰好使混合物完全溶解,并放出448



