高中通用技术:
高中 通用技术
如图所示是一款鼓架。下列关于该产品的设计分析和评价的说法中不正确的是

A . 采用万向轮设计,主要考虑了“人”的因素
B . 鼓架展开后的长度和宽度,主要考虑了“物”的因素
C . 铁质支架喷涂油漆,不仅美观,而且能够防止生锈
D . 鼓架通过铰连接可折叠,符合设计的经济原则
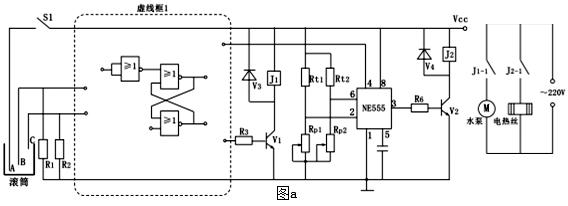
滚筒洗衣机在洗衣之前要进行一系列的准备工作:关闭洗衣机门,S1闭合通电,水泵M加水到上限水位C后,电热丝开始加热,使水温保持在40℃-60℃之间。如图a所示是小明设计的实验电路,不考虑排水过程请完成以下任务:
-
(1) 根据功能要求补全虚线框1内的电路;
-
(2) 关于该电路,下列分析中合理的是(在“A .水泵一边加水,电热丝一边加热; B .虚线框1内端子连线出现差错,该电路有空烧的危险; C . Rt1与Rt2为正温度系数热敏电阻;D .减小R6可以提高电热丝加热效率”中选择合适的选项,将序号填入横线处);
-
(3) 若要保持上限水温不变, 下限水温降为30℃,合理的措施是(在 “A .增大Rp1的阻值; B .增大Rp2的阻值; C .减小Rp1的阻值; D .减小Rp2的阻值”中选择合适的选项,将序号填入横线处);
-
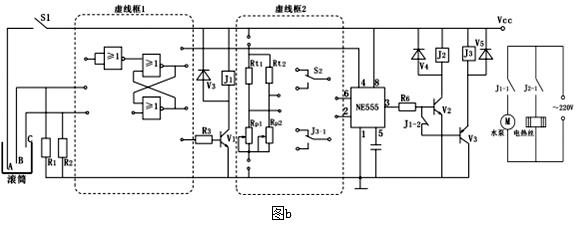
(4) 小明对电路进行改进:通过拨动开关S2设置40℃和60℃两种洗涤水温;通过J3使电热丝只能加热一次以达到节能的目的。根据功能要求补全虚线框2内的电路。
下图是某仓库模型大门控制电路图,芯片IC1为电压比较器,当时,输出为高电平,时,输出为低电平。通过电机的正反转来开启和关闭大门。A、B、C、D为密码输入端,当电流从M点流向N点时电机正转,大门开启,其中SQ为行程限位开关,大门完全打开或关闭时触碰断开。请分析该电路,下列说法中正确的是( )
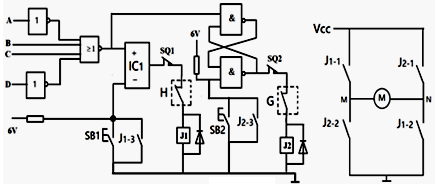
A . 如果想要开门,需输入密码0110
B . 根据条件J1控制关门,J2控制开门
C . 虚线框G接入J1的常闭触点,H处接入J2的常闭触点
D . 在具体控制过程中输入密码与按下SB的先后顺序无关
如图所示的淋浴喷头的尺寸中,不是从人机关系角度考虑的是( )
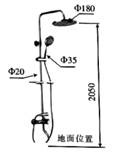
A . 2050
B . φ180
C . φ35
D . φ20
无人驾驶汽车是智能汽车的一种,需要计算机系统与汽车系统的有机整合。其主要工作原理是:计算机系统根据用户选定的目的地自动规划行车路线,导航系统会实时检测行车路线是否偏移,通过计算机控制转向系统修正路线;行驶中利用车载传感器来感知车辆周围环境,计算机根据车载传感器所获得的道路、车辆位置和障碍物等信息,及时控制转向系统和制动系统,实现避让和超车,从而使车辆能够安全、可靠地在道路上行驶。据此回答下题。
-
(1) 关于无人驾驶汽车系统,下列说法错误的是( )A . 可分为导航子系统、计算机子系统、转向子系统和制动子系统等 B . 若计算机系统处理不及时会导致避让不及时而发生事故,体现了系统的动态性 C . 能适用于不同交通状况的道路,体现了系统的环境适应性 D . 设计时既要考虑性能可靠,又要兼顾成本等因素,体现了系统分析的综合性原则
-
(2) 关于无人驾驶汽车的工作原理,下列分析说法不正确的是( )A . 需要用户自己设置目的地,因此还不是自动控制 B . 无人驾驶汽车沿规划路线行驶的控制,可设计成闭环控制 C . 无人驾驶汽车避让和超车的控制,可设计成开环控制 D . 沿规划路线行驶过程中干扰因素包括其它车辆和障碍物
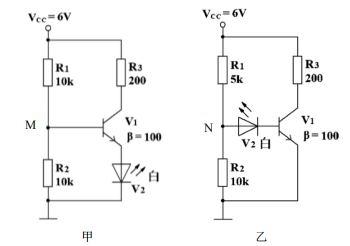
如图所示的电路中,三极管都是硅管,饱和压降约0.3V,发光二极管的导通电压约3V,小明已经搭接好了电路,请完成下面小题。
-
(1) 小明使用指针式多用电表检测电路,下列操作中不正确的是( )A . 通电情况下,测量发光二极管的导通电压时,红笔接在正极,黑笔接在负极 B . 通电情况下,测量M点的电位,红笔接在M点,黑笔接地 C . 测量电阻阻值时,当指针偏转角度过小,应换较大倍率挡进行测试 D . 断电情况下,使用多用电表的电阻挡检测三极管,红笔接在三极管的基极,黑笔接在三极管的发射极,测量发射结的正向电阻
-
(2) 关于该电路,下列说法中不正确的是( )A . 甲图中,流过发光二极管的电流约为0mA,乙图中,流过发光二极管的电流约为0.09mA B . 甲图中,M点的电位为3V,乙图中,N点的电位约为3.7V C . 甲图中,V1截止,乙图中,V1工作状态无法判断 D . 甲图中,R2电阻减小,发光二极管V2状态不变,乙图中,R1电阻减小,流过发光二极管V2电流变大
如图所示的组合式桌椅的尺寸标注中,不是从人机角度考虑的是( )
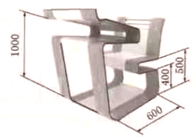
A . 1000
B . 500
C . 600
D . 400
有一色环电阻,色环颜色为棕、黑、红、金,该电阻的阻值大约是1kΩ。
如图所示的是一款智能支付戒指,关于该产品,下列从人机关系的角度分析中,不正确的是( )

A . 使用时只需戴在手指上即可完成支付,实现了人机关系的高效目标
B . 外形美观时尚,满足了人的心理需求
C . 智能支付戒指戴在手指上不易丢失,实现了人机关系的安全目标
D . 氧化钴陶瓷材质让人长期使用也不会过敏,实现了人机关系的健康目标
如图所示是一种可移动液压吊机的示意图,杆5、杆6为液压机构。下列分析中正确的是( )
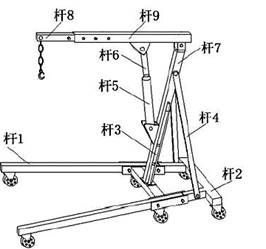
A . 要提高结构的稳定性,应把重心所在垂线调到支撑面中心处
B . 要提高结构的强度,可以把各构件之间的连接都改成刚连接
C . 杆5与杆3、杆6与杆9均为铰连接
D . 当挂钩上吊有重物时,杆8受弯曲,杆4受压
今年6月,最后一根500千伏海底电缆成功登陆舟山大鹏山岛,标志着中国自主研发的世界首个500千伏交联聚乙烯海缆敷设工程顺利完工。下列说法中不正确的是( )

A . 该海缆是同类海底电缆中耐压等级最高的海缆,体现了技术的创新性
B . 为舟山群島新区建设提供强大稳定的绿色动能,体现了技术的目的性
C . 与海底原油管线、通讯光缆等众多管线共存,体现了技术的综合性
D . 交联聚乙烯海缆相比油纸绝缘海缆更加安全环保,体现了可持续发展的理念
如图是用3D软件设计的吧台椅效果图。因为有了电脑辅助设计软件,使设计的主题更加丰富、表达的形式更加多样,这说明技术与设计的关系是( )

A . 技术发展为设计提供了新平台
B . 设计与技术无关
C . 设计比技术重要
D . 技术无所不能
如图所示为一小功率硅三极管实验电路图,表为其实验数据记录表。用Ube表示基极相对于发射极的电压,Ubc表示基极相对于集电极的电压。调节可调电阻R1可使得LED亮度发生改变,下列测量数据组合中正确的是( )
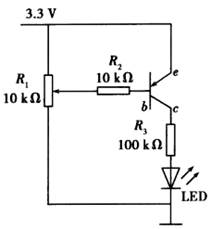
| LED | Ube | Ubc |
| 不亮 | ① | 1.5V |
| 亮度较暗 | -0.6V | ② |
| 亮度最高 | ③ | ④ |
A . ①、②、③、④分别为-0.63V、-0.43V、1V、-0.42V
B . ①、②、③、④分别为-0.63V、1V、-0.42V、-0.43V
C . ①、②、③、④分别为-0.42V、1V、-0.63V、-0.43V
D . ①、②、③、④分别为-0.42V、-0.43V、-0.63V、1V
如图所示为3G无线防盗报警器,能360°旋转摄影,当有窃贼入侵时,能自动摄影并向主人手机发送视频报警。该控制系统的控制手段和控制方式属于( )

A . 手动控制、开环控制
B . 自动控制、开环控制
C . 自动控制、闭环控制
D . 手动控制、闭环控制
李明同学用相同的胶全板设计制作了两只尺寸相同的小凳(图示),经过试验,发现甲小凳比乙小凳能承受更大的载荷,其主要原因是( )

A . 甲小凳比乙小凳重心位置高
B . 甲小凳比乙小凳支撑面积大
C . 甲小凳比乙小凳材料强度大
D . 甲小凳比乙小凳结构合理
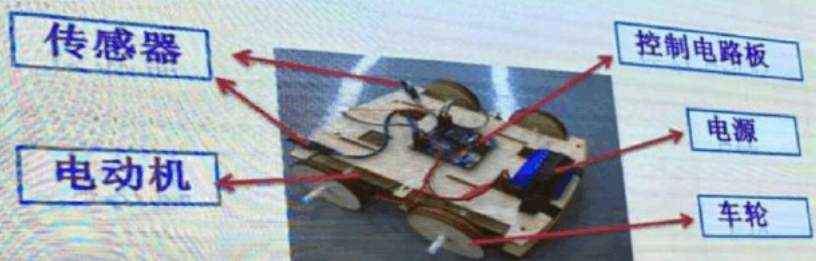
如图所示是一款自动避障小车控制系统。传感器采集障碍物的信号,并将采集的信号传到控制电路板,控制电路板根据预设的程序指令,控制电动机开启工作,带动车轮绕过障碍物,从而实现避障功能。
-
(1) 从系统结构和优化角度分析,下列说法中不合理的是( )A . 传感器可以看成是该系统的一个要素 B . 该小车具有避障功能,体现了系统的目的性 C . 电源电压是优化该控制的一个约束条件 D . 既要降低成本,又要保证质量,体现了系统分析的整体性原则
-
(2) 下列有关该控制系统说法正确的是( )A . 该系统是闭环控制系统 B . 被控对象是小车 C . 控制量是车轮的转速快慢 D . 输入量是小车的运动状态
如图所示是生物航空煤油,以下关于该生物航空煤油的说法中,错误的是( )
A . 废物利用,开发新能源,体现了利用技术改造自然的同时要保护自然的理念
B . 采用自主研发的技术,拥有自主知识产权,体现了技术的专利性
C . 涉及加氢技术、催化剂体系和工艺技术,体现了技术的综合性
D . 中国石化正在积极拓展生物航油原料来源,体现了技术具有保护人的作用
如图所示的压紧机构,在力F 的作用下,摆杆和连杆带动压紧臂转动,压杆上的压头便能将工件压紧。当连杆转至与底座垂直方向时,工件受到的压紧力最大,此时连杆、压紧臂和压杆的主要受力形式是( )
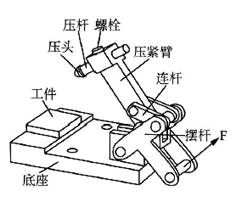
A . 连杆受拉,压紧臂受弯曲,压杆受压
B . 连杆受拉,压紧臂受压,压杆受压
C . 连杆受压,压紧臂受弯曲,压杆受压
D . 连杆受压,压紧臂受压,压杆受扭转
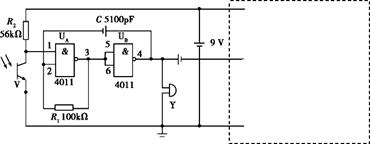
如图是光电报警器,当有人进入报警区时,传感器光敏管V的光被遮挡,UA与非门的1脚电位升高,2脚为0,所以3脚的电位也升高。由于UA的输出3脚与UB与非门的输入5、6脚直接相连,即高电位,故UB的输出4脚为低电位。
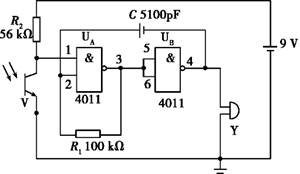
因为3脚电位高于4脚电位,所以电容通过电阻R1充电,使2脚的电位上升,3脚的电位下降,从而使4脚电位升高。周而复始形成振荡,产生的交变电流通过蜂鸣器Y发出报警的声音。
-
(1) 用A、B表示4011中与非门的两个输入端(1、2脚),Y表示输出端(3脚),则输入、输出端之间的逻辑关系是。
-
(2) 当传感器光敏管的光被人遮挡时,光敏管V的阻值(在①增大;②减小;③不变中选择一项,将序号填写在横线处)。
-
(3) 如果将传感器光敏管V与R2对换后,当传感器光敏管的光被人遮挡时,此时蜂鸣器Y(在①发出报警声;②不发报警声中选择一项,将序号填写在横线处)。
-
(4) 该报警器通过蜂鸣器发出的报警声太小,需要设计一个信号放大器,将振荡器产生的交变电流放大,然后推动扬声器发出响亮的声音。请你根据上述要求,在虚线框中画全电路:
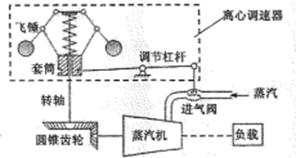
如图为蒸汽机的转速控制系统,采用离心调速的方式进行控制,当蒸汽机的转速大于设定值时,通过圆锥齿轮将转速传递到转轴,带动两个飞锤做离心运动,使套筒向上运动,通过调节杠杆使进气阀门的开度变小,蒸汽进气量减少,蒸汽机的转速下降,反复调节直到转速趋于设定值。
-
(1) 该控制系统属于(开环/闭环)控制系统。
-
(2) 请完善控制系统方框图。①②

-
(3) 该控制系统中,飞锤、套筒和调节杠杆组合的作用是(传感器/控制器/执行器)。
最近更新
- There is in today’s newspaper. Let’s read a storybo
- 如图所示,有一电子(电量为e、质量为m)经电压U加速后,沿平行金属板A、B中心线进入两板,A、B板间距为d、长度为L,
- 9.依次填入的横线上的关联词语最恰当的是( ) 太阳好象是天空中最亮的天体,____把它放到其他恒星的位
- 给下列句子排序,最恰当的一项是(2分)①而湛江的天空依然湛蓝,海滩依然迷人,红嘴鸥依然栖息在船头,②发展经济固然非常重要
- 请用一句话概括出下面一段文字所报道的核心内容。(不超过10字)(3分)意大利威尼斯市本周将通过在该市运河底下兴建地铁的计
- 射线是放射性物质发出的电磁波,波长在2×10-10m以下,是一种能量很大的光子流。一个光子的能量至少相当于_____个频
- 宋朝初期,我国已将湿法炼铜应用于生产,其反应原理为( )A.CuO+H2Cu+H2O B.Cu+COCu
- 如图表示某生态系统食物网的图解,猫头鹰体重每增加1kg,至少消耗A约( )A.100 kg
- 下列叙述正确的是( ) A.元素的单质一定是由还原该元素的化合物来制得 B.含有最高价元素的化合物不一定
- 在下列哪一种情况下力对物体是做了功的( )。A.用力推讲台,讲台没有动.B.人提水桶沿水平地面行走.C.沿斜坡方向把
- 下列有关实验现象描述错误的是 A.红磷在空气中燃烧产生大量白烟 B.铁丝浸入硫酸铜溶液中,有红色物质析出
- China now has 380 million smokers - about onethird of the wo
- 若非空集S{1,2,3,4,5},且若a∈S,必有(6-a)∈S,则所有满足上述条件的集合S共有( ) A
- 下图表示哪个宗教的建筑:( )A、基督教 B、伊斯兰教 C、佛教
- It’ssummer movie time again. And heroes are ready to try the
- 关于新疆地形分布的叙述,下列说法正确的是 ( )A.中间低,四周高
- While shopping,people sometimes can’t help into buying som
- 读北纬30°附近三个三角形洲位置示意图,回答关于以上三角洲人文地理特征的叙述,正确的是
- 中国是历史悠久的文明古国,许多历史上的伟人、名人影响着一代代中国人的成长。如孔子、孟子、张衡、陶渊明、李白、杜甫、苏轼、
- 实验室配制500mL0.2mol/L Na2SO4溶液,所需仪器有 ;若实验操作中某同



