弹簧综合 知识点题库
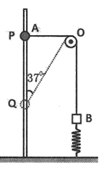
如图所示,A,B两小球由绕过轻质定滑轮的细线相连,A放在固定的光滑斜面上,B,C两小球在竖直方向上通过劲度系数为k的轻质弹簧相连,C球放在水平地面上。现用手控制住A,并使细线刚刚拉直但无拉力作用,并保证滑轮左侧细线竖直、右侧细线与斜面平行。已知A的质量为4m,B,C的质量均为m,重力加速度为g,细线与滑轮之间的摩擦不计,开始时整个系统处于静止状态。释放A后,A沿斜面下滑至速度最大时C恰好离开地面。下列说法正确的是( )
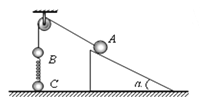
 C . C刚离开地面时,B的加速度最大
D . 从释放A到C刚离开地面的过程中,A,B两小球组成的系统机械能守恒
C . C刚离开地面时,B的加速度最大
D . 从释放A到C刚离开地面的过程中,A,B两小球组成的系统机械能守恒
 ,求:
,求: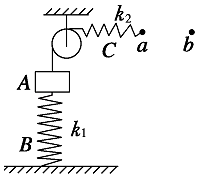
-
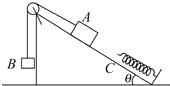
(1) 弹簧C在a点时,弹簧B的压缩量x1
-
(2) a、b两点间的距离L.
-
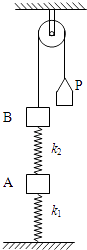
(1) 小桶P内所加人的细砂质量;
-
(2) 小桶在此过程中下降的距离.
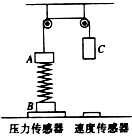
(I)开始时,系统在外力作用下保持静止,细绳拉直但张力为零.现释放C,使其向下运动,当压力传感器示数为零时,触发速度传感器测出C的速度为v.
(II)在实验中保持A,B质量不变,改变C的质量M,多次重复第(1)步.
①该实验中,M和m大小关系必需满足Mm(选填“小于”、“等于”或“大于”).
②为便于研究速度v与质量M的关系,每次测重物的速度时,其已下降的高度应(选填“相同”或“不同”).
③根据所测数据,为得到线性关系图线,应作出(选填“v2﹣M”、“v2﹣  ”或“v2﹣
”或“v2﹣  ”)图线.
”)图线.
④根据③问的图线知,图线在纵轴上截距为b,则弹簧的劲度系数为(用题给的已知量表示).
-
(1) 物体A向下运动刚到达C点时的速度;
-
(2) 弹簧的最大压缩量;
-
(3) 弹簧中的最大弹性势能.
 g,下落高度H到B点后与一轻弹簧接触,又下落h后到达最低点C,整个过程中不计空气阻力,且弹簧始终在弹性限度内,重力加速度为g,则带电物块在由A点运动到C点过程中,下列说法正确的是( )
g,下落高度H到B点后与一轻弹簧接触,又下落h后到达最低点C,整个过程中不计空气阻力,且弹簧始终在弹性限度内,重力加速度为g,则带电物块在由A点运动到C点过程中,下列说法正确的是( )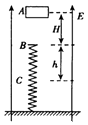
 B . 带电物块和弹簧组成的系统机械能增加量为
B . 带电物块和弹簧组成的系统机械能增加量为  C . 带电物块电势能的增加量为mg(H+h)
D . 弹簧的弹性势能的增加量为 mg(H+h)
C . 带电物块电势能的增加量为mg(H+h)
D . 弹簧的弹性势能的增加量为 mg(H+h)
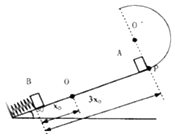
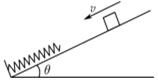
如图所示,在倾角为30°的光滑斜面底部固定一轻质弹簧,将一质量为m的物块B静置于斜面上,平衡时,弹簧的压缩量为x0 , O点为弹簧的原长位置.在距O点距离为2x0 的斜面顶端P点有一质量也为m的物块A,现让A从静止开始沿斜面下滑,A与B相碰后立即粘在一起沿斜面向下运动,并恰好回到O点(A、B均视为质点).试求:
-
(1) A、B相碰后瞬间的共同速度的大小;
-
(2) A、B相碰前弹簧具有的弹性势能;
-
(3) 若在斜面顶端再连接一光滑的半径R=x0的半圆轨道PQ,圆轨道与斜面最高点P相切,现让物块A以多大初速度从P点沿斜面下滑,才能使A与B碰后在斜面与圆弧间做往复运动?
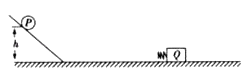
如图所示,质量为mP=2kg的小球P从离水平面高度为h=0.8m的光滑斜面上滚下,与静止在光滑水平面上质量为mQ=2kg的带有轻弹簧的滑块Q碰撞,g=10m/s2 , 下列说法正确的是( )
![]()
-
(1) 子弹打击滑块结束后瞬间,滑块和子弹的共同速度v的大小;
-
(2) 计算滑块滑行过程中弹簧弹性势能的最大值Ep.
 和劲度系数
和劲度系数 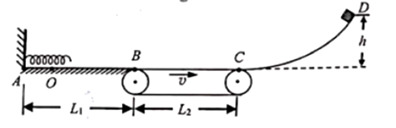
-
(1) 滑块从D到O的过程中与皮带摩擦产生的热量;
-
(2) 弹簧的最大弹性势能;
-
(3) 滑块再次回到右边曲面部分所能到达的最大高度;
-
(4) 滑块第八次从右边曲面部分滑到皮带上运动的过程中,距离A点的最小值。
 L
B . 小球A由P下滑至Q的过程中,弹簧弹性势能减少了 mgL
C . 小球A由P下滑至Q的过程中,一定先做加速运动,后做减速运动
D . 若将小球A换成质量为
L
B . 小球A由P下滑至Q的过程中,弹簧弹性势能减少了 mgL
C . 小球A由P下滑至Q的过程中,一定先做加速运动,后做减速运动
D . 若将小球A换成质量为  的小球C,并将小球C拉至Q点由静止释放,则小球C运动到P点时的动能为 mgL
的小球C,并将小球C拉至Q点由静止释放,则小球C运动到P点时的动能为 mgL
 ,左侧为半径
,左侧为半径  的光滑圆弧轨道
的光滑圆弧轨道  ,轨道的上端点B和圆心O的连线与水平方向的夹角
,轨道的上端点B和圆心O的连线与水平方向的夹角  ,下端点C与粗糙水平轨道
,下端点C与粗糙水平轨道  相切,
相切,  为倾角
为倾角  的光滑倾斜轨道,一轻质弹簧上端固定在E点处的挡板上。现有质量为
的光滑倾斜轨道,一轻质弹簧上端固定在E点处的挡板上。现有质量为  的小滑块P(可视为质点)从空中的A点以
的小滑块P(可视为质点)从空中的A点以  的初速度水平向左抛出,恰好从B点沿轨道切线方向进入轨道,沿着圆弧轨道运动到C点之后继续沿水平轨道 滑动,经过D点(不计经过D点时的能量损失)后沿倾斜轨道向上运动至F点(图中未标出),弹簧恰好压缩至最短。已知C、D之间和D、F之间距离都为
的初速度水平向左抛出,恰好从B点沿轨道切线方向进入轨道,沿着圆弧轨道运动到C点之后继续沿水平轨道 滑动,经过D点(不计经过D点时的能量损失)后沿倾斜轨道向上运动至F点(图中未标出),弹簧恰好压缩至最短。已知C、D之间和D、F之间距离都为  ,滑块与轨道 间的动摩擦因数为
,滑块与轨道 间的动摩擦因数为  ,不计空气阻力。求:
,不计空气阻力。求: 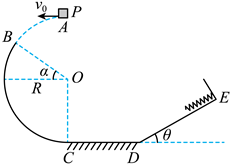
-
(1) 小滑块P经过圆弧轨道上B点的速度大小;
-
(2) 小滑块P到达圆弧轨道上的C点时对轨道压力的大小;
-
(3) 弹簧的弹性势能的最大值;
-
(4) 试判断滑块返回时能否从B点离开,如能求出飞出B点的速度大小;若不能,判断滑块最后位于何处。

-
(1) 若释放弹簧,物块离开弹簧,滑上传送带刚好能到达C点,求弹簧储存的弹性势能Ep;
-
(2) 若弹簧储存的弹性势能为1.8J,释放弹簧,物块离开弹簧,滑过传送带,通过圆弧轨道的最高点E点后做平抛运动,求平抛运动的水平位移大小;
-
(3) 若传送带沿顺时针方向以恒定速度v = 4m/s匀速转动,释放弹簧,要使物块离开弹簧,滑过传送带后,能进入半圆轨道且不脱离,求弹簧储存的弹性势能Ep。
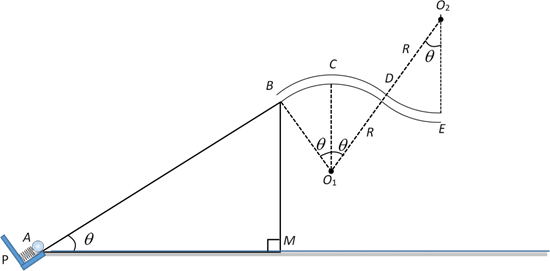
 ,然后进入“S”型光滑细圆管道,最后从管道出口E点水平飞出,落到水平面上的G点(图中未画出)。已知弹珠的质量为
,然后进入“S”型光滑细圆管道,最后从管道出口E点水平飞出,落到水平面上的G点(图中未画出)。已知弹珠的质量为  ,B点的高度
,B点的高度  ,细圆管道圆弧半径
,细圆管道圆弧半径  ,弹珠与轨道AB间的动摩擦因数
,弹珠与轨道AB间的动摩擦因数  ,
,  ,
,  。
。 
-
(1) 求弹射系统对弹珠做的功
 ;
;
-
(2) 求弹珠落到水平面上的G点时EG的水平距离L;
-
(3) 若弹射系统对弹珠做的功 不变,“S”型光滑细圆管道BCDE的圆弧半径
 可调,求弹珠落地点到E点的最大水平距离
可调,求弹珠落地点到E点的最大水平距离  ;
;
-
(4) 若“S”型光滑细圆管道BCDE的圆弧半径 不变,弹射系统对弹珠做的功可变化,小球每次返回A点时以原速度大小反弹,求弹珠在斜面上运动的最大路程
 。
。
-
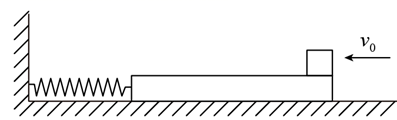
(1) 木块和长木板刚好共速时,弹簧的弹性势能;
-
(2) 木块和长木板能获得的最大速度(可带根号)。
的滑块P(可视为质点)压缩弹簧至A处但不粘连,滑块P与水平面  间的动摩擦因数为 。由静止释放滑块,滑块从
间的动摩擦因数为 。由静止释放滑块,滑块从  点滑出后做平抛运动落到
点滑出后做平抛运动落到  点。已知 点高出水平地面
点。已知 点高出水平地面  ,
,  点在 点的正下方, 到 点的距离为
点在 点的正下方, 到 点的距离为  ,水平面 段的长度为
,水平面 段的长度为  ,重力加速度
,重力加速度  取
取  。求:
。求: 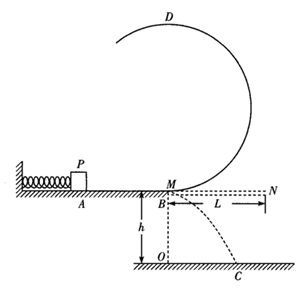
-
(1) 滑块压缩弹簧至A处时弹簧储存的弹性势能的大小;
-
(2) 若在 端平滑连接一水平放置长为
 的木板
的木板  ,滑块从A处释放后正好运动到
,滑块从A处释放后正好运动到  端停止,求木板 与滑块间的动摩擦因数;
端停止,求木板 与滑块间的动摩擦因数;
-
(3) 若将水平面 换成光滑的水平面,在 处接一竖直光滑圆轨道,要使滑块恰能通过圆轨道的最高点
 ,则圆轨道的半径 为多大。
,则圆轨道的半径 为多大。
- 下图是非洲乞力马扎罗山的冰川面积在1910年~2000年的变化示意图。根据图中的信息判断,下列说法不正确的是 A.该变
- (2011年四川成都,4题) 据悉,英国海军建造了一种反水雷的“塑料战舰”,舰身材料是一种强化塑料。则该塑料A.属于天然
- 读下图,回答1~2题。1.若图中阴影区域为一城中心,①②③为19∶00等时线(指汽车从城市中心向外行驶所用时间相等点的连
- 在物理学发展过程中,有许多伟大的科学家做出了巨大贡献。关于科学家和他们的贡献,下列说法正确的是 A.库仑最早引入电
- (07广西三校联考)下列关于细胞的说法正确的一组是①含细胞壁结构的细胞必定为植物细胞 ②含中心体的细胞必定为动物细胞
- (2013广西三校联考)某同学利用图甲所示的实验装置做了这样的实验。 ①按住小车,在小吊盘中放入适当质量的物块。释
- “会说话的汤姆猫”是一款手机宠物类应用(如图所示)。游戏时,当你对着它讲话,它就会模仿你的腔调学舌,非常好玩。“汤姆猫”
- 一个密闭的保温装置中装有正在萌发的种子,每隔一段时间测定其内的温度和氧气含量,并将结果绘制成曲线。如果横轴表示时间,纵轴
- 用同种材料制成的横截面积相同的电阻丝甲和乙,已知乙的长度比甲大,将它们并联在电路中,则它们的电功率 A.甲的较大
- 有下列叙述:①在空间直角坐标系中,在Ox轴上的点的坐标一定是(0,b,0); ②在空间直角坐标系中,在yOz平面上点的坐
- 物体做匀加速直线运动,加速度为3 m/s2,下列说法正确的是() A.物体的末速度一定比初速度大3 m/s B.物体在每
- (09年天门中学月考理)(12分)已知平面上三个向量的模均为1,它们相互之间的夹角均为.(1) 求的值; (2)
- 解放后我国的农业生产发生了翻天覆地的变化,图12中A、B、C三地的农业也得到了快速的发展。阅读下图回答有关问题。1..从
- 下列各句中,加点的词语解释不完全正确的一项是 A.项为之强(通“僵”,僵硬) 惩(苦于)山北之塞 B
- 1912年元旦,《申报》刊登了这样一条庆贺标语:“中华民万岁”。《申报》把“国”字改写为“”主要是表达( ) A.“三
- 某种商品的标价为200元,按标价的八折出售,这时仍可盈利25%,则这种商品的进价是元.
- 洪仁玕《资政新编》中提出:“用人不当,足以坏法;设法不当,足以害人。只有二者兼顾,才能权归于一”。这种主张体现的法制思想
- 如图所示光学显微镜下观察到的根尖分生区的细胞,视野内看到最多的细胞是 ( )
- 下列各组词语中加点字的读音,与所给注音全都相同的一组是( ) A.假jiǎ 暑假 假嗓子
- 公元前452—450年间,罗马先后铸造十二块铜牌,详细列出民法、刑法、诉讼程序等许多方面的内容,公布于罗马广场,史称“十



