有用功和额外功 知识点题库
如图所示,拉力F=80N,物体重力G=120N,不计摩擦和绳重。若在4s内将物体匀速提高1m,以下说法错误的是()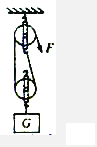
A . 拉力做的有用功为120J
B . 该滑轮组的机械效率为75%
C . 动滑轮的重力为40N
D . 拉力做的总功的功率为20W
如图所示,用滑轮组提升重物时,重800N的物体在10s内匀速上升了1m.已知拉绳子的力F为500N,则提升重物的过程中( )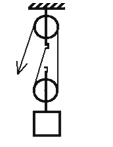
A . 滑轮组的机械效率是60%
B . 绳子自由端被拉下3m
C . 做的有用功是800J
D . 拉力F的功率是80W
一个滑轮组经改装后提高了机械效率,用它把同一物体匀速提升同样的高度,改进后与改进前相比较( )
A . 总功减少,额外功增多
B . 机械效率提高,机械做功加快
C . 功率变大,机械做功更多
D . 有用功不变,总功减少
小均用动滑轮将质量为40kg的货物匀速提高了5m ,他用250N的拉力拉了10s,下列说法正确的是()
A . 有用功为200J
B . 额外功为500J
C . 动滑轮的机械效率为75%
D . 小均的功率为200W
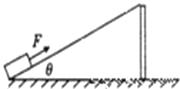
如右图所示,斜面长1m,高0.4m,用大小为5N沿斜面向上的拉力F,将重10N的铁块从底端匀速拉到顶端,则在这一过程中对铁块所做的总功为J;有用功为J;斜面的机械效率为。
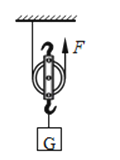
如图所示,小明用动滑轮把90N的重物匀速提升2m,所用的拉力是60N,则小明做的有用功是J,动滑轮的机械效率是 .
如图,工人用滑轮组在15s内将重为480N的重物匀速提升3m,所用拉力为200N.

-
(1) 工人所做的有用功是多少?
-
(2) 拉力的功率是多少?
-
(3) 滑轮组的机械效率是多少?
为抗旱在河堤上安装了一台电动机带动的抽水机,若抽水机的效率为49%,抽水机每小时能将360m3的水送到10米高的农田里,求抽水机装置配用的电动机的功率是多少千瓦?
现有一重为3000N的包装箱,工人师傅想把它搬到1.2m高的车厢上,他们用木板在车厢与地面之间搭成一个长度约为4m的简易斜面,如图所示,工人师傅站在地上用1200N的推力沿斜面把包装箱匀速推上车.求: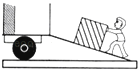
-
(1) 该斜面的机械效率是多少?
-
(2) 包装箱在斜面上运动时所受摩擦力多大?
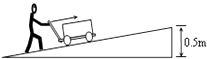
如图所示,现某人用小车将它从斜面底端匀速推上斜面顶端,已知木箱重400N,人对车的推力F=75N,斜面长L=4m,斜面高h=0.5m,求:
-
(1) 对木箱所做的有用功;
-
(2) 这种情况下的机械效率.
某同学不小心把水桶掉进井里,当他把桶从井里捞出来时,桶里带了一些水,下面有关有用功、额外功和总功的说法正确的是( )
A . 克服桶的重力做的功是总功
B . 克服桶内水的重力做的功是总功
C . 克服桶的重力做的功是有用功
D . 提水的功与提桶的功之和是总功
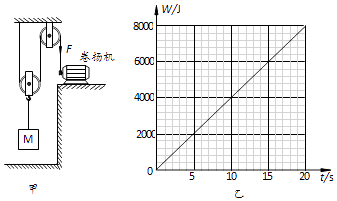
用如图甲所示的滑轮组提升物体M,已知被提升的物体M重为760N,卷扬机加在绳子自由端的拉力F,将物体M以0.5m/s的速度匀速提升到5m的高度.拉力做的功W随时间t的变化图象如图乙所示,不计绳重和滑轮与轴的摩擦.求:
-
(1) 滑轮组提升重物所做的有用功W有;
-
(2) 滑轮组提升重物的机械效率η;
-
(3) 动滑轮的重力G动 .
如图所示,工人利用滑轮组提升重为810N物体,在10s内物体匀速升高1m,工人拉力F的功率为90W,拉力F克服摩擦做的功是60J,不计绳重.

求:
-
(1) 工人做的有用功;
-
(2) 滑轮组的机械效率;
-
(3) 滑轮组中的动滑轮的重力.
小明直接用水桶装着水从一楼提到三楼的家中,克服水的重力所做的功和克腰桶的重力所做的功分别是( )
A . 总功和有用功
B . 总功和额外功
C . 有用功和额外功
D . 均是有用功
一辆正在匀速行驶的汽车,所受阻力为1500N,从甲地到乙地150km,已知该汽车这种情况下每百公里耗油12L(汽油的热值4.6×107J/kg,汽油的密度0.72g/cm3),问:
-
(1) 该车从甲地到乙地克服阻力做多少功?
-
(2) 汽车的效率是多少?
如图所示,工人用滑轮组提升重240N的物体,所用的拉力为150N,物体在5s内匀速上升1m。求:

-
(1) 有用功;
-
(2) 滑轮组的机械效率;
-
(3) 拉力的功率。
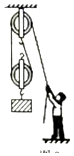
工人用如图所示的装置在10s内将重物提高1m,已知物重为510N,人对绳的拉力F=340N,求此过程中:
-
(1) 拉力所做的有用功;
-
(2) 拉力所做的总功;
-
(3) 拉力做功的功率;
-
(4) 该滑轮组的机械效率。
阅读短文,回答问题。
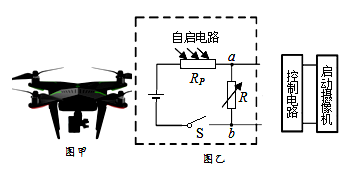
“无人机”多功能飞行器可通过无线电进行操控,其在拍摄调查、无人配送等方面具有广阔的前景。如图甲为某品牌“无人机”,由锂电池供电,采用4个电机带动旋翼转动,对下方空气施力的同时获得升力。该无人机设有一键起降和返航、空中悬停等功能,其携带的摄像机可以进行高清拍摄并实时把信号传到遥控器显示器。下表是该无人机的部分参数:
| 无人机质量含摄像机 | 1.5kg | 锂电池额定电压 | 12V |
| 最大上升速度 | 6m/s | 电动机工作电压 | 10V |
| 最大水平速度 | 15m/s | 每个电动机最大输出功率 | 50W |
| 最大上升速度时受 到的空气阻力 | 9N | 电动机的能量转化效率 | 95 |

-
(1) 当“无人机”携带摄像机飞行在空中进行拍摄地面图象时,下列说法中错误的是______A . “无人机”升空时,获得升力的施力物体是空气 B . “无人机”中的电动机是将电能主要转化为机械能 C . “无人机”在拍摄地面图象时增加悬停高度可以使所成的像变大 D . “无人机”升空过程中所受到大气压变小
-
(2) 为了保证电动机正常工作,通过电子调速器简称电调来控制电动机的电流从而改变电动机的功率,每一个电动机连接一个电调,那么电动机和电调的连接方式是(选填“并联”或“串联”)。
-
(3) 已知“无人机”上升时受到的空气阻力与上升速度的平方成正比。该“无人机”携带摄像机参与某次火情的勘测时,“无人机”以4m/s的速度从地面匀速竖直升空至100m高处,然后悬停观测(整个过程四个电动机同时工作)。此时,“无人机”上升时受到的空气阻力为N,“无人机”上升过程中电动机做的功为J,消耗的电能为J。
-
(4) 该“无人机”携带的微型摄像机带有自动拍摄功能,未出现火情时处于待机状态,等到火情来临产生一定强度的红外线,摄像机将自主启动进入工作状态。小明利用红外探测器设计了一个“模拟自启系统”,如图乙所示。该系统由“自启电路”、“控制电路”等组成。其中电源由“无人机”的锂电池提供,R是电阻箱,RP是红外探测器,可视为可变电阻,它的阻值与红外线强度变化的对应关系如下表所示。(E为红外线强度,cd表示其单位)
E/cd
1.0
2.0
3.0
4.0
6.0
RP/

18
9
6
4.5
3
若a、b两端电压必须等于或大于9V时,控制电路才能启动摄像机进入工作状态。小明设定红外线强度为4cd时启动摄像机工作,电阻箱的阻值至少应调到
,为了能使控制电路在红外线强度较弱时就能启动摄像机进入工作状态,最简单的方法是将电阻箱R的阻值(填“调大”或“调小”)。
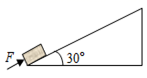
如图所示,已知固定斜面长5m,倾角为30°,木箱重150N。某同学用大小为100N的推力沿斜面向上推木箱,使木箱沿斜面匀速从底端运动到顶端的过程中,关于木箱所受的力对木箱做的功,下列判断正确的是( )
A . 木箱克服重力做功的大小为500J
B . 斜面支持力做功的大小为375J
C . 推力做功的大小为750J
D . 木箱克服斜面摩擦力大小为25N
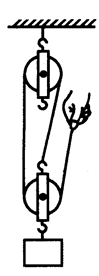
利用如图所示的滑轮组,要把重为600 N的物体匀速提高5 m,若动滑轮重100 N(不计绳重),人实际用力250 N,求:
-
(1) 滑轮组的机械效率;
-
(2) 因摩擦而产生的额外功。
最近更新
- Mark, together with two boys, for having broken the
- “刻舟求剑”违背了这样的哲理( ) ①联系是具体的、客观的、有条件 ②事物是变化发展的,静止不动的事物是不存在的 ③想问
- 如图2-1-16所示,粗糙的水平地面上有一斜劈,斜劈上一物块正在沿斜面以速度v0匀速下滑,斜劈保持静止,则地面对斜劈的摩
- 下列生态系统被称为“绿色水库”的是( )。 A. 草原生态系统 B.淡水生态系统 C. 森林生
- (9分)体积为1.2×10-3 cm3的油滴在静止的水面上扩展为4 m2的单分子油膜,假设分子间是紧密排列的,则可估算出
- 18世纪的物理学家发现,真空中两个点电荷间存在相互的作用.点电荷间的相互作用力跟两个点电荷的电荷量有关,跟它们之间的距离
- 二氧化铅(PbO2)是生产汽车蓄电池的电极材料,其中铅元素的化合价是 A.+1 B.+2
- he number of people who gathered there ___ uncountable. a. w
- 某学生欲制作一种家用环保型消毒液发生器,下列是他所设计的装置,你认为比较合理的是 ( )
- ≥0的解( )A.x<1或x>3 B.1<x<3 C.x≤1或x>3
- 如图,一束单色光射入一玻璃球体,入射角为60°。己知光线在玻璃球内经一次反射后,再次折射回到空气中时与入射光线平行。此玻
- 下列加点的字注音全都正确的一项是( ) A.朱拓(tuò) 汀渚(zhě) 惘(wǎng)然
- 风险性是居民投资理财考虑的一个重要因素。下列投资理财产品的风险性从低到高排序,正确是( ) ①金融债券 ②企业
- (10分)(1)具有支链的化合物A的分子式为C4H6O2,A可以使Br2的四氯化碳溶液褪色。1molA和1mol NaH
- 下列物质中最难电离出H+的是( ) A.CH3CH2OH B.CH3COOH
- 某烃的分子式为C11H20,1mol该烃在催化剂作用下可以吸收2mol H2;用热的酸性KMnO4溶液氧化,得到丁酮()
- 明清时期是我国封建制度的衰落时期,但17-18世纪中国又出现了被封建史学家称谓的“康乾盛世”的社会局面。你如何理解“衰落
- 下表是对某高校高三学生进行体检后,发现部分同学被检测指标出现异常(-表示无,+表示少量,++”表示大量)。据表分析回答:
- 下列说法正确的是 ( ) A. 乙烯与苯都能发生加成反应,所以都能使溴水褪色 B. ①乙二醇②乙醇③丙烷④甘油
- 满足条件{1,2}⊆M⊆{1,2,3,4,5}的集合M的个数是________.



