二、学生实验:探究杠杆 知识点题库

-
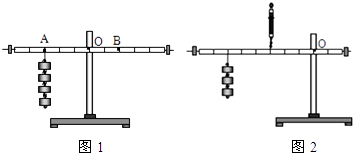
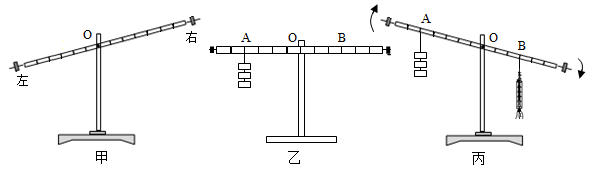
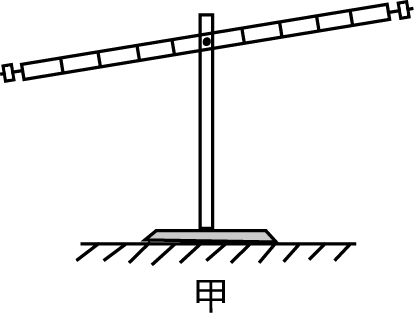
(1) 实验前,将杠杆的中点置于支架上,当杠杆静止时,发现杠杆左端下沉,这时应将平衡螺母向(选填“左”或“右”)端调节,直到杠杆在水平位置平衡.
-
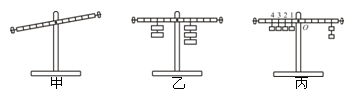
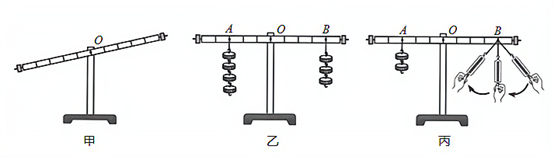
(2) 如图1所示,①在杠杆A点处挂4个钩码,则在B点处应挂个同样的钩码,杠杆仍然在水平位置平衡.
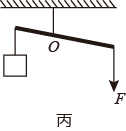
②把B点处的钩码取下,在B点处施加一个竖直向下的拉力F=N时,杠杆仍然在水平位置平衡.当拉力F向右倾斜时,仍要保持杠杆在水平位置平衡,拉力F的大小将(选填“变大”、“变小”或“不变”).原因是.
-
(3) 如果小王又进行了如图2所示的探究,考虑杠杆的影响,发现用弹簧测力计在C点竖直向上拉使杠杆仍然处于水平位置平衡时,则弹簧测力计的示数应大于N.
-
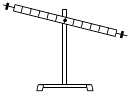
(1) 在做实验时,要求杠杆在水平位置平衡的目的是.小王同学把杠杆放在支架后,如图所示,他应将平衡螺母向节(选填“左”或“右”).
-
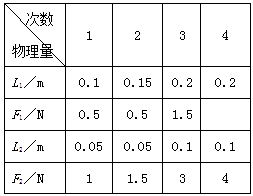
(2) 小王的实验数据如下表:
动力F1/N
动力臂L1/m
阻力F2/N
阻力臂L2/m
3
0.05
1
0.15
根据实验数据分析,可得出杠杆的平衡条件:.
-
(3) 小王所做实验仍存在不足.同一物理实验中,经常需要测多组数据.以下四个实验中测多组数据目的相同的有(选填序号).
①探究杠杆平衡的条件 ②伏安法测定值电阻的阻值
③探究串联电路中的电流规律 ④探究动滑轮特点
这些实验测多组数据目的都是为了.

小华是采用在杠杆两侧挂钩码的方法探究的,所以根据实验情况她得出的结论是:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”。在与同学交流时,小敏同学指出了她的错误,并利用如图所示的装置,进行了一个简单的操作就帮助小华解决了困惑。小敏的操作是。
-
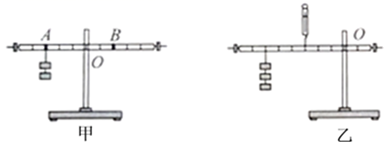
(1) 实验前为方便测量力臂长度,应将杠杆调节到位置平衡,如果杠杆的右端向下倾斜,平衡螺母应向端调节。
-
(2) 实验记录的数据如表中所示,收集多组数据的目的是;实验得到的结论是(用字母符号表示)。
-
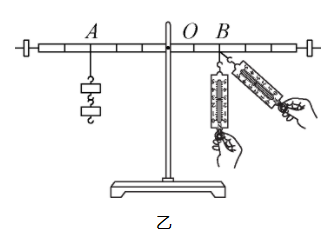
(3) 图中杠杆处于平衡状态,每个钩码受到的重力是0.5N,则弹簧测力计竖直向下的拉力是N;拉着弹簧测力计,逐渐向右倾斜,并保持杠杆在水平位置平衡,弹簧测力计的示数将。
-
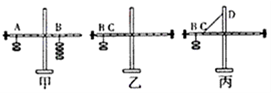
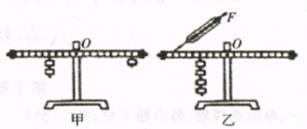
(1) 当把杠杆组装在支架上时,发现杠杆右端下沉,此时应将杠杆两侧的平衡螺母向端调节(选填”左”“右”),使杠杆在水平位置平衡。
-
(2) 如图甲所示,在杠杆两端各悬挂一定数量的钩码后,杠杆在水平位置平衠。如果在两侧各取下一个钩码,杠杆端将下沉(选填“左”“右”);若要让杠杆再次在水平位置平衡,可将右侧的三个钩码悬挂在离支点更(选填“近”或“远”)的位置
-
(3) 如果在C点改用弹簧测力计拉杠杆,如图乙所示。为了使杠杆在水平位置平衡且弹簧测力计的示数最小,应沿的方向拉。若将细线一端系在C点另一端固定在支架上的D点如图丙所示,则细线对杠杆的拉力将(选填“大于”、等于”或“小于”)乙图操作中弹簧测力计的示数。
-
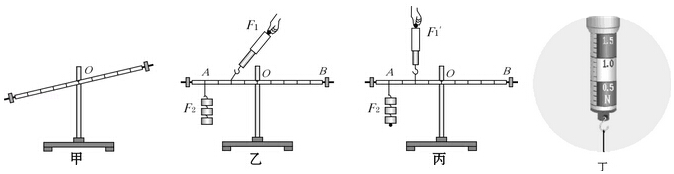
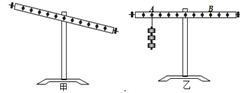
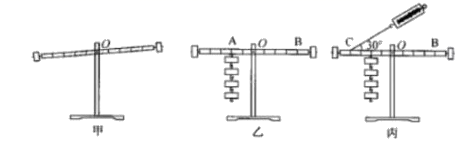
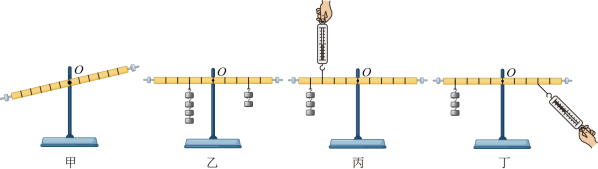
(1) 实验前,将杠杆的中点置于支架上,发现杠在如图甲所示的位置保持静止,此时杠杆(选填“是”或“不是”)处于平衡状态,小明将左端的平衡螺母向右调,小红认为也可以将右端的平衡螺母向调(选填“右”或“左”),使杠杆在水平位置平衡。
-
(2) 杠杆调好后小明同学按图乙进行实验,小红同学按图丙进行实验。同学们讨论后一致认为小红同学的实验更合理,理由是。
-
(3) 按图丙实验时,测力计示数如图丁所示,拉力F1′为N。
-
(4) 在探究过程中,我们需要测量和记录动力、动力臂、阻力、阻力臂四个物理量,在进行多次实验的过程中,我们(选填“可以”或“不可以”)同时改变多个物理量,进行探究测量;多次测量的目的是。
-
(1) 如图甲,挂钩码前,应把杠杆的平衡螺母向调节,使杠杆在水平位置平衡,目的是为了方便。
-
(2) 实验过程记录的数据如下表,分析数据,得到杠杆的平衡条件是。若将图乙中左侧一个钩码取下,则需将右侧钩码向移动,杠杆才有可能重新平衡。
实验次数
动力F1/N
动力臂l1/m
阻力F2/N
阻力臂l2/m
1
1.0
0.02
0.5
0.04
2
2.0
0.04
4.0
0.02
3
2.5
0.03
1.5
0.05
-
(3) 实验中,如用图丙的方式悬挂钩码,杠杆也能水平平衡,但老师建议不宜采用这种
方式,因为 (选出一个正确选项)
A . 杠杆受力不平衡 B . 力臂与杠杆不重合 C . 力和力臂数目过多,不易得出结论 -
(4) 如图,小明使用手机自拍杆拍照时,自拍杆伸得越长,手握杆的力越(选填“大”或“小”),此时自拍杆是杠杆(选填“省力”“等臂”或“费力”)。

-
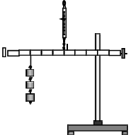
(1) 把质量分布均匀的杠杆中点作为支点,其目的是消除 对实验的影响;挂钩码前,把杠杆调到水平位置平衡的目的是.
-
(2) 如图甲所示,杠杆水平平衡,若在两侧的钩码下再各增加一个相同的钩码,杠杆会失去平衡,则端下降。
-
(3) 如图乙所示,杠杆在水平位置平衡,画出弹簧测力计拉力F的力臂L。
-
(1) 实验时应先调节杠杆在位置平衡。若出现图甲所示情况,应将杠杆的螺母向调(填“左”或“右”)。
-
(2) 杠杆平衡后,小明在图乙所示的A位置挂上3个钩码,为了使杠杆在水平位置平衡,这时应在B位置挂上个钩码。
-
(3) 下表是该组某同学在实验中记录杠杆平衡的部分数据:上表中空格处所缺的数据是:△=,☆=;
实验次数
F1(N)
L1(cm)
F2(N)
L2(cm)
1
2
5
△
10
2
3
10
2
15
3
2
30
3
☆
-
(4) 分析上表中的实验数据可以得出的结论是;
-
(5) 实验结束后,小明提出了新的探究问题:“若支点不在杠杆的中点时,杠杆的平衡条件是否仍然成立?”于是小组同学利用如图丙所示装置进行探究,发现在杠杆左端的不同位置,用弹簧测力计竖直向上拉使杠杆处于平衡状态时,测出的拉力大小都与杠杆平衡 条件不相符。其原因是:。
⑴静止于支架上的杠杆如图甲示,应将杠杆右侧的螺母向{选填“左”或“右”)调节,使杠杆处于水平平衡状态,这样做的目的是为了便于测量(选填“力”成“力臂”)。杠杆平衡后,在实验过程中,(选填“可以”或“不可以”)再调节螺母;
⑵在杠杆两边分别挂上数量不同的钩码,改变钩码数量和位置,使杠杆处于水平平衡状态,记录教据,总结可得杠杆的平衡条件为:动力×动力臂=阻力×阻力臂;
⑶根据结论可知,要使杠杆呈图乙中的水平平衡状态,应在B点挂个钩码;改用弹簧测力计替换B点的钩码,始终竖直向下拉杠杆,使杠杆从水平位置缓慢转过一个小角度(图丙),此过程中弹簧测力计拉力的力臂,拉力的大小(后两空选填“变大”、“变小”或“不变”)。
-
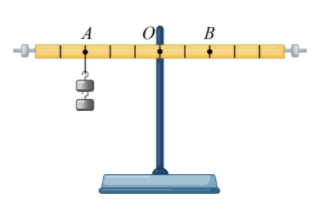
(1) 调节杠杆平衡后,在图甲所示的A位置挂上2个钩码,可在B位置挂上个钩码,使杠杆在水平位置平衡。
-
(2) 某同学采用如图乙所示装置进行实验,发现总是无法得到课本上所给出的平衡条件,原因是。
-
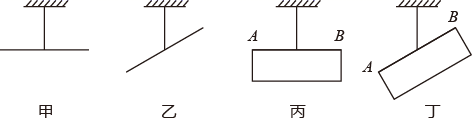
(1) 如图甲,一质量分布均匀的杠杆,忽略厚度和宽度,长度不可忽略,用细线将它从中点悬起,能在水平位置平衡。将它绕悬点在坚直面内缓慢转过一定角度后(如图乙)释放,为研究其能否平衡,可将它看成等长的两部分,请在图乙中画出这两部分各自所受重力的示意图和力臂,并用杠杆平衡条件证明杠杆在该位置仍能平衡;
-
(2) 如图丙,一质量分布均匀的长方形木板,忽略厚度,长度和宽度不可忽略,用细线将它AB边的中点悬起,能在水平位置平衡。将它绕悬点在坚直面内缓慢转过一定角度后(如图丁)释放,木板在该位置能否平衡?写出你的判断依据。
-
(1) 实验前,杠杆静止时右端偏高,此时杠杆处于(选填“平衡”或“非平衡”)状态,为使杠杆在水平位置平衡;应将两端的平衡螺母向调节;
-
(2) 杠杆调节平衡后,在杠杆的A点挂2个钩码,为了便于,应使杠杆重新在水平位置平衡,则需要在B点挂个钩码;平衡后,如果在A、B两点同时再各加挂一个钩码,杠杆的(选填“左”或“右”)端会下沉。

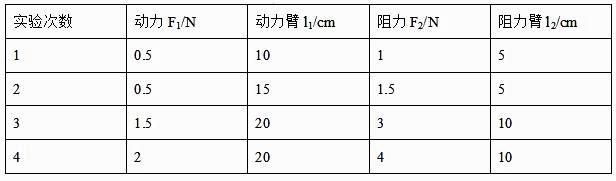
⑴应先调节杠杆两端的平衡螺母,使杠杆在位置平衡;这样做是为了便于测量,如发现杠杆左端偏高,则可将右端的平衡螺母向调节,或将左端的平衡螺母向调节。如图是小明同学三次实验的情景,实验时所用的每个钩码重0.5N,杠杆上每一格长5cm,部分实验数据已记录在下表中;
| 实验次数 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 1.5 | 10 | 1 |
|
| 2 | 1 | 20 |
| 10 |
| 3 | 1 | 20 | 1.5 | 10 |
⑵请将表格中的实验数据补充完整。
⑶小明的第3次实验存在错误,其错误是;
⑷在探究杠杆平衡条件的实验中,多次改变力和力臂的大小主要是为了()
A.减小摩擦
B.使每组数据更准确
C.多次测量取平均值减小误差
D.获取多组实验数据归纳出物理规律
-
(1) 实验前杠杆如图甲所示,应该向(选填“左”或“右”)调节平衡螺母,使杠杆在位置平衡,这样做是为了。
-
(2) 如图乙所示,在杠杆上的左右两端分别挂上不同数量的钩码,完成三次实验后,记录的数据见下表,由此可初步得出杠杆的平衡条件是:。(用F1、F2、L1和L2表示)
实验次数
F1/N
L1/cm
F2/N
L2/cm
1
1.0
6
1.5
4
2
2.0
6
1.5
8
3
3.0
2
1.0
6
-
(3) 如图丙所示,小明利用弹簧测力计动态观察拉力的变化,其他因素保持不变,如果只将轻质弹簧测力计按图示方向缓慢转动的过程中,仍使杠杆在水平位置保持平衡,则弹簧测力计的示数将________。A . 一直变小 B . 一直变大 C . 先变大后变小 D . 先变小后变大
-
(4) 实验探究中要多次改变力和力臂的大小重复实验,目的是______。(填选项前的代码)A . 多次测量取平均值减小误差 B . 寻找普遍规律避免偶然性
-
(5) 若在图乙中的杠杆两侧各添加一个钩码,杠杆将会。(选填“左端下沉”“保持水平”或“右端下沉”)
-
(1) 如图甲,把杠杆放在支架上并置于水平桌面,静止时发现杠杆左低右高,为了使杠杆在水平位置平衡,应将右端的平衡螺母向调节.
-
(2) 如图乙,在已经调节好的杠杆左A处挂4个钩码,要使杠杆仍在水平位置平衡,应在杠杆右边离支点4格的B处挂个相同的砝码.
-
(3) 如图丙,在杠杆左边离支点4格的C处,用弹簧测力计与水平方向成30°角斜向上拉,也可使杠杆在水平位置平衡,则弹簧测力计示数为N(每个钩码重0.5N).
-
(1) 为使图甲中的杠杆在水平位置平衡,应将平衡螺母向(选填“左”或“右”)端调节。调节杠杆在水平位置平衡,可以方便测量。
-
(2) 如图乙所示,在B点竖直向下拉弹簧测力计,使杠杆在水平位置平衡,测力计的示数为F1 , 然后再将弹簧测力计改为斜拉,仍使杠杆在水平位置平衡,测力计的示数为F2 , 它们的大小关系是F1F2
-
(3) 请画出图丙中的杠杆所受动力F的力臂L。
-
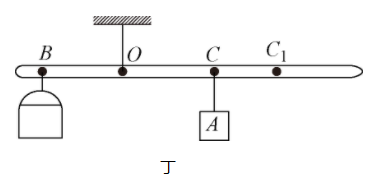
(4) 学习了杠杆知识后,小华利用图丁所示的杠杆(自身重力不计),来测量液体的密度,已知小桶的容积为100cm3 , 物体A的质量为50g。她把空桶悬挂在B点,把物体A悬挂在C点,此时杠杆水平平衡,测得OB=5cm,OC=10cm。然后在小桶中注满液体,将物体A移到C1点时,杠杆水平平衡,测出OC1=22cm,则小桶中液体的密度为kg/m3
-
(1) 实验前将杠杆的中点置于支架上,没挂钩码时,杠杆静止的位置如图甲所示,此时应将平衡螺母向调节;
-
(2) 杠杆平衡后,小明在左右两侧分别挂上钩码,如图乙所示,杠杆的端会下沉,要使杠杆重新在水平位置平衡,在不改变钩码悬挂点的位置及不增加钩码的前提下,只需将即可;
-
(3) 小宏用弹簧测力计竖直向上拉杠杆,使杠杆在水平位置平衡,如图丙所示,则弹簧测力计的读数是N;小丽又设计了如图丁所示实验方案,对于小宏和小丽的方案,你认为的实验方案更好,理由是:;
-
(4) 实验中小丽发现:如果在杠杆的O点用弹簧测力计施加一个向上的力,这个力在探究实验时是否影响到杠杆的平衡?答:,理由是:。
- 有关太阳辐射及其对地球影响的叙述,正确的是( ) A.太阳辐射的能量来源于太阳内部的核聚变反应 B.太阳放出的能量
- 对于两个非零实数x,y,定义一种新的运算:.若,则的值是 .
- 下列溶液中各微粒的浓度关系不正确的是 ( ) A.0.1mol·L-1HCOOH溶液中:
- 沿直线运动的一列火车和一辆汽车,在计时开始时及每过1s时火车和汽车的速度分别为v1和v2如表所示,由表中数据可看出()
- 关于线粒体和叶绿体的共同叙述中,不正确的是 A.都是双层膜结构的细胞器 B.所含酶的功能都相同 C.都有基质和基粒 D.
- (6分)化肥对提高农作物的产量具有重要作用,NH4NO3是一种含氮量较高的化肥。 (1)NH4NO3中氮、氢、氧元素的质
- 马克思说过,只要英国人“把机器用于一个有煤有铁的国家的交通上”,“就无法阻止这个国家去制造这些机器了”。对于这段话的正确
- 每当中华民族面临重大困难的时候,中华文化的力量就会突显出来。4月14日在青海玉树发生7.1级大地震后,中华民族团结一致,
- 设f(x)是定义在R上的奇函数,当x≤0时,f(x)=2x2-x,则f(1)=( ) A.-3 B.-1
- 正常情况下,当人体局部组织活动增加时,代谢产物增加,此时刻组织中的( ) A.组织液增加,淋巴增加 B.组
- 设全集I={0,1,2,3,4},集合A={0,1,2,3},集合B={2,3,4},则∪= ( )A.{0
- 要得到番茄的无籽果实,需将一定浓度的生长素溶液滴在雌蕊的柱头上。处理的时期和条件是() A.花蕾期,不去雄蕊 B.花蕾期
- 补写出下列名篇名句中的空缺部分。(6分) (1)沧海月明珠有泪,________________。___________
- 阅读下列材料: 材料一 1974年之后,“秦俑”出土,这更增加我们思考的机会。这批陶器塑像据估计约为六到七千个,个个不
- 下列命题正确的是() A.当n为偶数时,=a B.当n为奇数时,=a C.(-1)=(-1) D.0=0
- 1954年,美国最高法院在一项判决书中宣布,公立学校实行种族隔离、拒绝黑人入学是违反宪法的,这一裁决引起了南方一些州的抵
- 某电场的电场线的分布如图所示。一个带电粒子由M点沿图中虚线所示的途径运动通过N点。则下列判断正确的是 ( )A.粒
- 2015年1月1日,新修订的《中华人民共和国预算法》正式实施,这是预算法20年来首次大修。预算法修改要经历的下列程序中排
- 下列关于中国冶铁业发展的表述,正确的有 ①世界最早的铁器出现在中国②中国书籍的的人工治炼铁器出现在春秋晚期 ③汉代开始用
- (8分)一个右端开口左端封闭的U形玻璃管中装有水银,左侧封有一定质量的空气,如图所示,已知,空气柱长是40cm,两侧水银



