验证机械能守恒定律 知识点题库

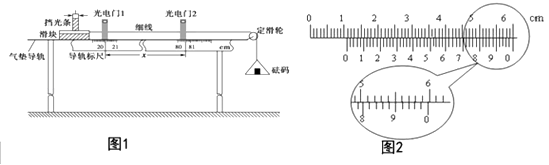
①实验时要调整气垫导轨水平.不挂钩码和细线,接通气源,释放滑块,如果滑块,则表示气垫导轨已调整至水平状态.
②不挂钩码和细线,接通气源,滑块从轨道右端向左运动的过程中,发现滑块通过光电门1的时间小于通过光电门2的时间.实施下列措施能够达到实验调整目标的是
A.调节P使轨道左端升高一些
B.调节Q使轨道右端降低一些
C.遮光条的宽度应适当大一些
D.滑块的质量增大一些
E.气源的供气量增大一些
③实验时,测出光电门1、2间的距离L,遮光条的宽度d,滑块和遮光条的总质量M,钩码质量m.由数字计时器读出遮光条通过光电门1、2的时间t1、t2 , 则系统机械能守恒成立的表达式是
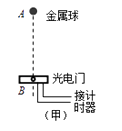
如图(甲)所示,一位同学利用光电计时器等器材做“验证机械能守恒定律”的实验.有一直径为d、质量为m的金属小球由A处从静止释放,下落过程中能通过A处正下方、固定于B处的光电门,测得A、B间的距离为H(H>>d),光电计时器记录下小球通过光电门的时间为t,当地的重力加速度为g.则:
-
(1)
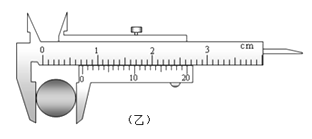
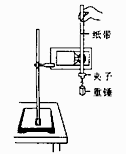
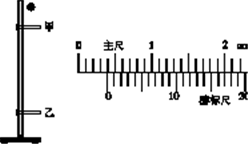
如图(乙)所示,用游标卡尺测得小球的直径d=mm.
-
(2) 小球经过光电门B时的速度表达式为.
-
(3)
多次改变高度H,重复上述实验,作出
 随H的变化图象如图(丙)所示,当图中已知量t0、H0和重力加速度g及小球的直径d满足以下表达式:时,可判断小球下落过程中机械能守恒.
随H的变化图象如图(丙)所示,当图中已知量t0、H0和重力加速度g及小球的直径d满足以下表达式:时,可判断小球下落过程中机械能守恒.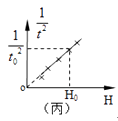
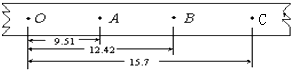
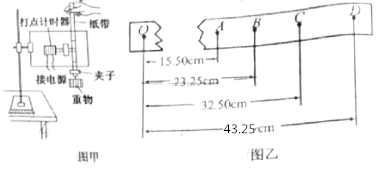
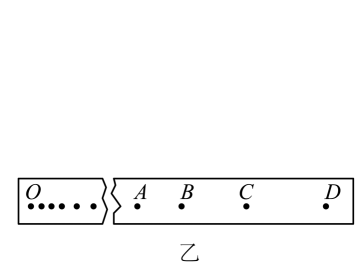
在用落体法验证机械能守恒定律时,某同学按照正确的操作选得纸带如图.其中O是起始点,A、B、C是打点计时器连续打下的3个点.该同学用毫米刻度尺测量O到A、B、C各点的距离,并记录在图中(单位cm).
-
(1) 这三个数据中不符合有效数字读数要求的是段,应记作cm.
-
(2) 该同学用重锤在OB段的运动来验证机械能守恒,已知当地的重力加速度g=9.80m/s2 , 他用AC 段的平均速度作为跟B点对应的物体的瞬时速度,则该段重锤重力势能的减少量为,而动能的增加量为,(均保留3位有效数字,重锤质量用m表示).这样验证的系统误差总是使重力势能的减少量(填大于、小于或等于)动能的增加量,原因是.
-
(1) 实验步骤:
①将气垫导轨放在水平桌面上,桌面高度不低于1m,将导轨调至水平.
②用游标卡尺测量挡光条的宽度L,结果如图所示,由此读出L=mm.
③由导轨标尺读出两光电门中心之间的距离x
④将滑块移至光电门1左侧某处,待砝码静止不动时,释放滑块,要求砝码落地前挡光条已通过光电门2.
⑤从数字计时器(图中未画出)上分别读出挡光条通过光电门1和光电门2所用的时间△t1和△t2 .
⑥用天平称出滑块和挡光条的总质量M,再称出托盘和砝码的总质量m.
-
(2) 用表示直接测量量的字写出下列所求物理量的表达式:
①当滑块通过光电门1和光电门2时,系统(包括滑块、挡光条、托盘和码)的总动能分别为Ek1=和Ek2=.
②如果表达式成立,则可认为验证了机械能守恒定律.
-
(1) 下列实验操作顺序正确合理的一项是____(填序号)A . 先将固定在重物上的纸带穿过打点计时器,再将打点计时器固定在铁架台上 B . 先用手提着纸带,使重物静止在打点计时器下方,再接通电源 C . 先放开纸带让重物下落,再接通打点计时时器的电源 D . 先取下固定在重物上的打好点的纸带,再切断打点计器的电源
-
(2) 已知打点计时器所用电源的频率为50Hz,查得当地的重力加速度g =9.8m/s2 , 测得所用的重物的质量1.00kg,实验中得到一条点迹清晰的纸带,如图,把第一个点记作O,另选连续的4个点A,B,C,D作为测量的点,经测量知道A,B,C,D个点到O点的距离分别为62.99cm,70.18cm,77.70cm,85.73cm.根据以上数据,可知重物由O点运动到C点,重力势能的减少等于 J,动能增加量等于 J。 (计算结果留三位有效数字)
实验结论是

-
(1) 为了验证摆锤在运动过程中机械能守恒,必须求出摆锤在最低点的速度。为了求出这一速度,还应测量的物理量有。
-
(2) 用测得的物理量表示摆锤在最低点的速度v=。
-
(3) 用已知的和测得的物理量表示摆锤在运动过程中机械能守恒的关系式为。
-
(1) 实验中,还需要测量的一个物理量是.
-
(2) 小球通过光电门A时的速度大小为(用对应物理量的符号表示).
-
(3) 如果能满足关系式(用对应物理量的符号表示),即能证明小球下落过程中机械能守恒.
-
(1) 为验证机械能守恒定律,下列物理量中,需用工具直接测量的有,通过计算间接测量的有
A.重物的质量 B.重力加速度
C.重物下落的高度 D.重锤下落的瞬时速度
-
(2) 关于本实验的误差,下列说法中不正确的是________A . 选择质量较小的重物,有利于减小误差 B . 选择点击清晰且第1、2两点间距约为2mm的纸带有利于减小误差 C . 先松开纸后接通电源会造成较大的误差 D . 本实验产生误差的主要原因是重物在下落过程中不可避免地受到阻力的作用
-
(3) 在实验中,质量为m=1kg的物体自由下落,得到如图所示的纸带,相邻计数点间的时间间隔为0.04s,那个打点计时器打下起点O到打下B点的过程中,物体重力势能的减少量
 J,此过程中物体动能的增加量
J,此过程中物体动能的增加量  J。(
J。(  ,保留三位有效数字)
,保留三位有效数字)
-
(4) 本实验中,纸带记录的点到起点O 的距离为h,打对应点时重物的速度为v,若以
 为纵轴,以h为横轴,根据实验数据绘出的
为纵轴,以h为横轴,根据实验数据绘出的  图像应是,才能验证机械能守恒, 图像的斜率等于的数值。
图像应是,才能验证机械能守恒, 图像的斜率等于的数值。
-
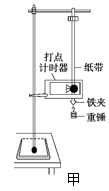
(1) 罗同学选用电火花打点计时器,则应按(填“甲”、“乙”或“丙”)图中的方法连接电源.

-
(2) 释放纸带前,下列操作正确的是______.A .
 B .
B .  C .
C . 
-
(3) 图丁为罗同学在实验中打出的一条纸带,“0”点为打下的第一个点,相邻两点间的时间间隔为
 ,重物的质量为
,重物的质量为  ,打下第5个点时重物减小的重力势能为
,打下第5个点时重物减小的重力势能为  (计算结果保留3位有效数字,注意:该地重力加速度
(计算结果保留3位有效数字,注意:该地重力加速度  ).
). 
-
(1) 实验时,应_______A . 先让重锤下落,后接通电源 B . 先接通电源,后让重锤下落 C . 让重锤下落的同时接通电源
-
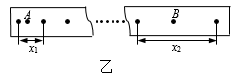
(2) 若x1=4.80cm,则在纸带上打下计数点A时的速度为m/s 。(计算结果保留三位有效数字)
-
(3) 实验中还需测出的物理量及对应的符号为。
-
(4) 验证的表达式为(用以上的物理量符号和重力加速度g表示)
-
(5) 该同学经过测量计算后,发现实验存在误差,你认为产生误差的原因可能是。
甲 乙
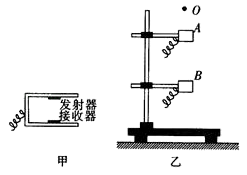
A.将一小铁球由光电门甲的上方一定高度处由静止释放;
B.通过计算机显示小铁球通过光电门甲、乙的时间分别为t1、t2;
C.用直尺测出光电门甲和乙之间的距离h;
D.用游标卡尺测出小铁球的直径d如图乙所示;
E.改变小铁球释放的高度,重复A、B步骤操作.
通过以上操作请回答下列问题:
-
(1) 读出图乙中小铁球的直径为d= cm,假设小铁球通过光电门甲的瞬时速度近似地等于该过程中的平均速度,则小铁球通过光电门甲的速度大小为v1=;(用题中字母表示)
-
(2) 如果重力加速度用g表示,在误差允许的范围内,要验证小铁球的机械能守恒,则只需验证=2gh.(用题中字母表示)
-
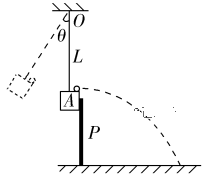
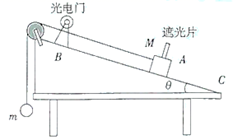
(1) 滑块通过B点的瞬时速度可表示为;
-
(2) 某次实验测得倾角
 ,重力加速度用g表示,滑块从A处到达B处时,小球和带遮光片的滑块组成的系统动能增加量可表示为
,重力加速度用g表示,滑块从A处到达B处时,小球和带遮光片的滑块组成的系统动能增加量可表示为  ,系统的重力势能减少量可表示为
,系统的重力势能减少量可表示为  ,在误差允许的范围内,若
,在误差允许的范围内,若  则可认为系统的机械能守恒。
则可认为系统的机械能守恒。
-
(1) 打点计时器打下计数点B时,物体的速度vB=m/s(保留到小数点后两位);
-
(2) 从起点P到打下计数点B的过程中物体的重力势能减少量△EP=J,此过程中物体动能的增加量△Ek=J;(g取9.8m/s2保留到小数点后两位)
-
(3) 通过计算,数值上△EP△Ek(填“大于”“小于”或“等于”),这是因为。
-
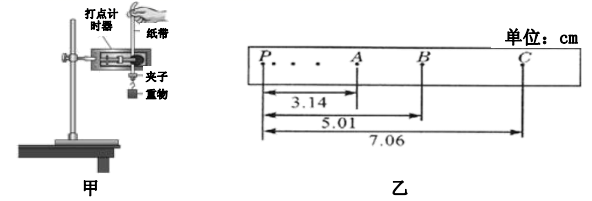
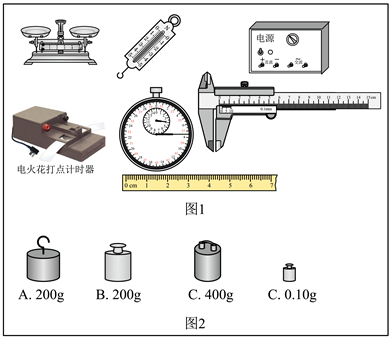
(1) 已提供了铁架台、夹子、导线、纸带等器材。为完成此实验,除了所给的器材,还需要从图1中选取的实验器材名称是,从图2中应选取的重物是。
-
(2) 某同学按照正确操作选的纸带如图3所示,其中O是起始点,
 是打点计时器连续打下的3个点,打点频率为
是打点计时器连续打下的3个点,打点频率为  ,该同学用毫米刻度尺测量O到A、B、C各点的距离,并记录在图中(单位:
,该同学用毫米刻度尺测量O到A、B、C各点的距离,并记录在图中(单位:  ),重锤的质量为
),重锤的质量为  ,根据以上数据当打点计时器打到B点时,重物的动能为J。(计算结果保留三位有效数字)
,根据以上数据当打点计时器打到B点时,重物的动能为J。(计算结果保留三位有效数字) 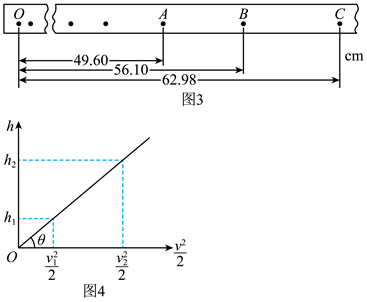
-
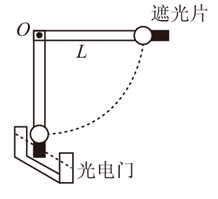
(3) 某同学根据正确的实验操作得到多组数据,画出了
 的图像(图4),根据图像求出当地的重力加速度g,以下表达式正确的是___________。
A .
的图像(图4),根据图像求出当地的重力加速度g,以下表达式正确的是___________。
A . B .
B .  C .
C .  D .
D . 
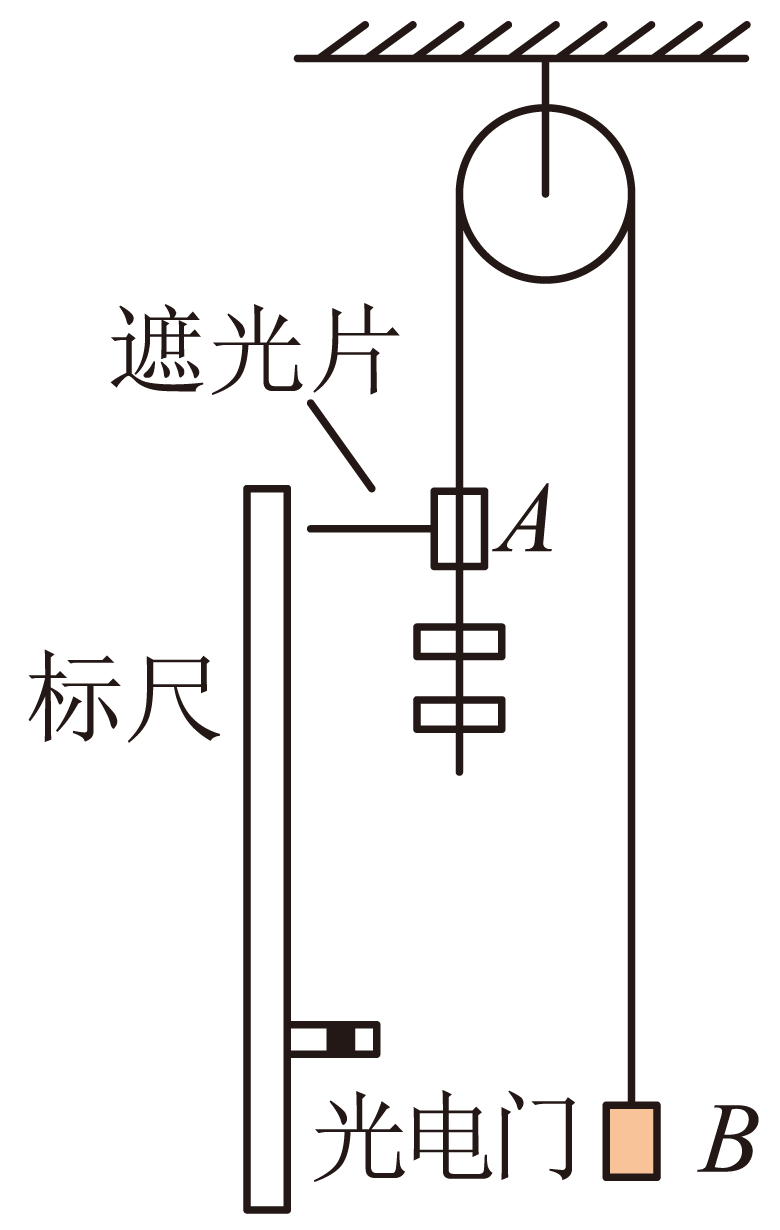
①小球(含遮光片)的质量为m,轻杆一端固定在光滑的转轴O上,另一端固定着小球,杆呈水平且处于静止状态,测量出转轴O到小球的距离为L,光电门放置于转轴O的正下方,与转轴O的距离略大于L,使得小球转至转轴O的正下方时光电门能够正常工作;
②释放轻杆使小球随轻杆顺时针转动,光电门记录遮光片的遮光时间为  ;
;
③测量出遮光片的宽度为d,计算有关物理量,验证机械能守恒定律;
④改变小球的质量,多次重复步骤①②③。
-
(1) 小球经过光电门时的速度大小
 (用题中测量的物理量表示)。
(用题中测量的物理量表示)。
-
(2) 已知当地的重力加速度大小为g,如果小球的机械能守恒,应满足的关系式为(用题中测量的物理量表示)。
-
(3) 实验时在测定小球和遮光片的质量m时,该同学操作错误使得测得的质量偏小,小球和遮光片可视为质点,则该同学操作错误对实验结果(选填“有影响”或“无影响”)。
-
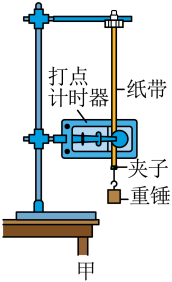
(1) 质量均为M的重物A、B用绕过光滑定滑轮的轻绳连接、重物A上装有质量不计的遮光片,竖直标尺下端固定有光电门,固定重物A.先记下遮光片在标尺上对准的位置,再在重物A点下面悬挂一个质量为m的钩码。由静止释放重物A,记录遮光片通过光电门的遮光时间t,若遮光片的宽度为d,则遮光片挡光时重物A的速度为v=。
-
(2) 在重物A下面依次悬挂2个,3个,4个……n个,每次重物A从同一位置静止释放,重复(1)实验n次,测得n个对应的遮光片遮光时间t,以t2为纵轴,以
 为横轴,作出
为横轴,作出 图像,另外还需要测量的物理量是(写出物理量及符号)。已知当地重力加速度为g,如果作出的图像与纵轴的截距等于,图像的斜率等于,则机械能守恒定律得到验证。
图像,另外还需要测量的物理量是(写出物理量及符号)。已知当地重力加速度为g,如果作出的图像与纵轴的截距等于,图像的斜率等于,则机械能守恒定律得到验证。
 。某同学选择了一条理想的纸带,用刻度尺测得各计数点到
。某同学选择了一条理想的纸带,用刻度尺测得各计数点到 的距离(单位:
的距离(单位: )如图所示,图中点是打点计时器打出的第一个点,
)如图所示,图中点是打点计时器打出的第一个点, 、
、 、
、 是连续打下的三个点。若重锤质量为
是连续打下的三个点。若重锤质量为 , 重力加速度取
, 重力加速度取 。打点计时器打出点时,重锤下落的速度
。打点计时器打出点时,重锤下落的速度
 , 重锤的动能
, 重锤的动能 J,从开始下落算起,打点计时器打点时,重锤的重力势能减小量为J。(结果均保留两位有效数字)通过计算,数值上
J,从开始下落算起,打点计时器打点时,重锤的重力势能减小量为J。(结果均保留两位有效数字)通过计算,数值上
 (填“>”“=”或“<”),这是因为。
(填“>”“=”或“<”),这是因为。![]()
-
(1) 实验时,应____(填字母代号)A . 先接通电源后释放纸带 B . 先释放纸带后接通电源
-
(2) 已知打点计时器打点周期为T,测得重锤的质量为m,查得当地重力加速度为g。如图乙所示,实验中得到一条点迹清晰的纸带,把打下的第一个点记作O,另选连续的4个点A、B、C、D作为测量点,测得A、B、C、D各点到O点的距离分别为x1、x2、x3、x4根据以上数据,可知重锤由O点运动到C点,重力势能的减少量为,动能的增加量为。(用已知量和测量量的符号表示)
-
(3) 实验中发现动能的增加量ΔEk总是(选填“大于”、“小于”或“等于”)重力势能的减少量ΔEp , 原因是。
- 桫椤是国家一级保护植物,它属于( ) A、藻类植物 B、苔藓植物
- 复数(其中为虚数单位),则下列说法中正确的是( ) A.在复平面内复数对应的点在第一象限 B.复
- 句型转换 1.Mr wu told us to leave school at once.The snowsto
- 下列叙述中,能证明某物质是弱电解质的是 ( )A、熔化时不导电 B、水溶液的导电能力很差C、溶
- ⑴美戴斯国王从陌生人那儿学会了点金术,高兴地跳了起来,满屋子奔跑,碰到什么东西就抓住什么东西。他抓住一根床柱,它立
- 在世界田径锦标赛上,博尔特以9秒58获得百米冠军,并再次改写世界记录.4天后,又以19秒19的成绩获得200米比赛冠军.
- 取出枪乌贼的粗大神经纤维,进行如右图所示的实验: 将电位计的两个微型电极a、b分别置于神经纤维膜外,强刺激c处,电位计
- 下列各数 :—(+2),—3,中,负数的个数是( )个; A、2 B、 3
- 11. (1)文中写宋荣子看淡了世间的荣辱,不会因为外界的评价而更加奋勉或沮丧的句子是: ,
- When I was fifteen, I announced to my Englishclass that I wa
- 在中,内角所对的边分别为,若,则的形状是( ) A.锐角三角形 B.直角三角形 C.钝角三角形
- 我们每天应喝适量的开水,这有利于( ) A.对无机盐的吸收 B.对葡萄糖
- 古诗词填空,任选五道。(10分) (1)《滁州西涧》中以飞转流动之势,衬托闲淡宁静之景的句子是____________,
- 目前,“看病难、看病贵”、“就业失业问题”和“收入差距过大、贫富分化”是我国最突出的三大社会问题。对此,政府应该:
- 水体中重金属铅的污染问题备受关注。水溶液中铅的存在形态主要有Pb2+、Pb(OH)+、Pb(OH)2、Pb(OH)、Pb
- 根据短文内容及首字母提示,写出所缺单词,使短文完整、通顺。 Are youlooking forward to chan
- 德、俄、日在进入帝国主义阶段都带有浓厚的封建残余,其主要的共同原因是( )A.资产阶级与封建势力相勾结起来
- 在前一种分散系中慢慢滴加后一种试剂,能观察到先沉淀后变澄清的是( ) ①氯化铝溶液中滴加氢氧化钠溶液
- 阅读下面的文字,完成12~14题。 草木故园 彭家河 ①比起人丁,乡下的草木已日渐兴旺。 ②乡村其实是属于草木的,村民本
- 从1978年到1992年,历经14年的探索和实践,中国特色社会主义道路有了明确方向。这里的“方向”指 A.对内进行改革同



