探究动能定理 知识点题库
-
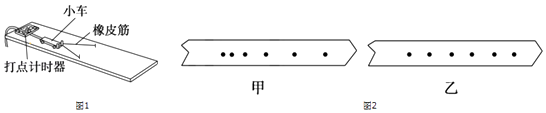
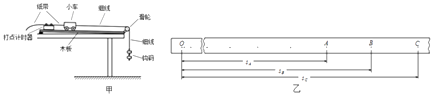
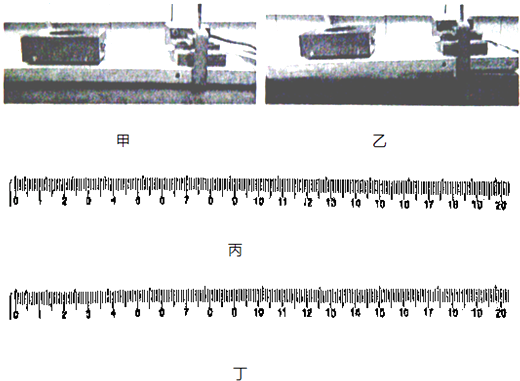
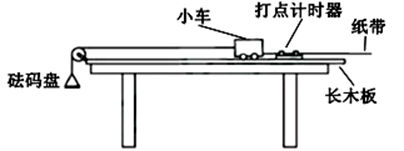
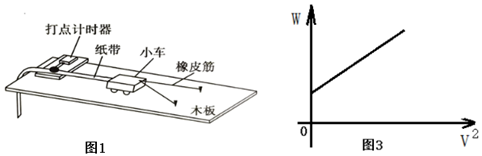
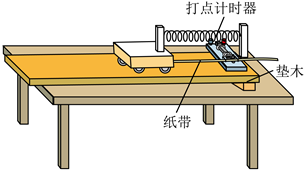
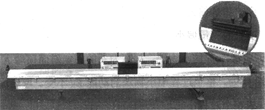
(1) 实验时,为使小车只在橡皮筋作用下运动,在未连接橡皮筋时将木板的左端用小木块垫起,使木板倾斜合适的角度,打开打点计时器,轻推小车,如图2所示,得到的纸带应该是(填“甲”或“乙”).
-
(2) 针对实验步骤和数据处理下列说法正确的是 .A . 为了平衡摩擦力,实验中可以将长木板的左端适当垫高,使小车拉着穿过打点计时器的纸带自由下滑时能保持匀速运动 B . 每次实验中橡皮筋的规格要相同,拉伸的长度要一样 C . 可以通过改变橡皮筋的条数来改变拉力做功的数值 D . 可以通过改变小车的质量来改变拉力做功的数值 E . 实验中要先释放小车再接通打点计时器的电源 F . 通过打点计时器打下的纸带来测定小车加速过程中获得的平均速度;
-
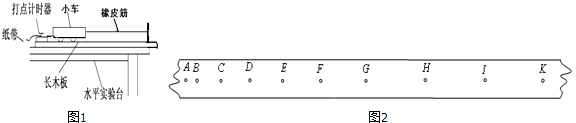
(3) 依据实验数据作出W﹣v2图象,则图3符合实际的图象是.
-
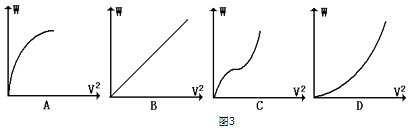
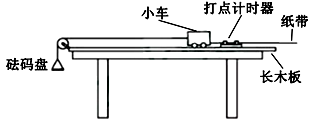
(1) 为了平衡小车受到的摩擦力,木板应(填“水平”或“倾斜”)放置;
-
(2) 判断摩擦阻力已被平衡的方法是A . 释放小车后,小车能够运动 B . 轻推一下小车,小车能够匀速运动 C . 释放小车后,拖着纸带的小车能够运动 D . 轻推一下小车,拖着纸带的小车能够匀速运动
-
(3) 实验中(填“需要”或“不需要”)测出一条橡皮筋对小车做功W的数值.
-
(4) 在正确操作情况下,打在纸带上的点,并不都是均匀的,为了测量小车获得的速度,应选用图2纸带的部分进行测量(选填“AD”、“DG”或“GK”).
-
(1) 若要完成该实验,必须的实验器材还有哪些.
-
(2) 实验开始时,他先调节木板上定滑轮的高度,使牵引小车的细绳与木板平行.他这样做的目的是下列的哪个 (填字母代号).A . 避免小车在运动过程中发生抖动 B . 可使打点计时器在纸带上打出的点迹清晰 C . 可以保证小车最终能够实现匀速直线运动 D . 可在平衡摩擦力后使细绳拉力等于小车受的合力
-
(3) 平衡摩擦力后,当他用多个钩码牵引小车时,发现小车运动过快,致使打出的纸带上点数较少,难以选到合适的点计算小车速度.在保证所挂钩码数目不变的条件下,请你利用本实验的器材提出一个解决方法:.
-
(4) [多选]他将钩码重力做的功当作细绳拉力做的功,经多次实验发现拉力做功总是要比小车动能增量大一些.这一情况可能是下列哪些原因造成的 (填字母代号).A . 在接通电源的同时释放了小车 B . 小车释放时离打点计时器太近 C . 阻力未完全被小车重力沿木板方向的分力平衡掉 D . 钩码做匀加速运动,钩码重力大于细绳拉力.
-
(1) 除了图示的实验器材,下列器材中还必须使用的是 .A . 直流电源 B . 刻度尺 C . 秒表 D . 天平(含砝码)
-
(2) 实验中需要通过调整木板倾斜程度以平衡摩擦力,目的是 .A . 为了使小车能做匀加速运动 B . 为了增大绳子对小车的拉力 C . 为了使绳子对小车做的功等于合外力对小车做的功
-
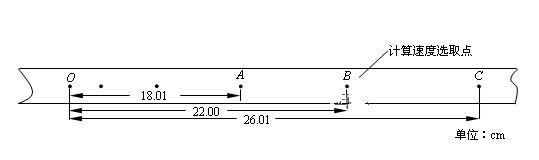
(3) 为了使绳子的拉力约等于钩码的总重力,需要确保钩码的总质量远远小于小车的质量.实验时,先接通电源,再释放小车,得到图乙所示的一条纸带.在纸带上选取三个计数点A、B、C,测得它们到起始点O的距离分别为sA、sB、sC , 相邻计数点间的时间间隔为T,已知当地重力加速度为g,实验时钩码的总质量为m,小车的质量为M.从O到B的运动过程中,拉力对小车做功W=,小车动能变化量△Ek=.
-
(4) 另一位同学在本实验中,也平衡了摩擦力,并打出了一条纸带,但钩码的总质量m没有远远小于小车的质量M,在处理数据时,他仍然取绳子的拉力约等于钩码的总重力.该同学采用图像法进行数据分析:在纸带上选取多个计数点,测量起始点O到每个计数点的距离,并计算出每个计数点对应的小车速度v以及从O点到该计数点对应的过程中绳子拉力所做的功W,描绘出v2﹣W图像.请你根据所学的知识分析说明:该同学所描绘的v2﹣W图像应当是直线还是曲线(不考虑空气阻力影响).
①调节气垫导轨使其水平.并取5个质量均为m的砝码放在滑块上:
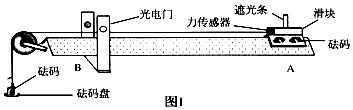
②用细绳连接砝码盘与力传感器和滑块,让滑块静止放在导轨右侧的某一位置,测出遮光条到光电门的距离为S;
③从滑块上取出一个砝码放在砝码盘中,释放滑块后,记录此时力传感器的值为F,测出遮光条经过光电门的挡光时间△t;
④再从滑块上取出一个砝码放在砝码盘中,重复步骤③,并保证滑块从同一个位置静止释放;
⑤重复步骤④,直至滑块上的砝码全部放入到砝码盘中.
请完成下面问题:
-
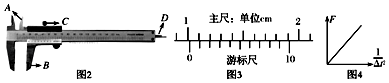
(1) 若用十分度的游标卡尺测得遮光条宽度d如图3,则d=mm.
-
(2) 滑块经过光电门时的速度可用v=(用题中所给的字母表示,下同)计算.
-
(3) 在处理步骤③所记录的实验数据时,甲同学理解的合外力做功为W1=FS,则其对应动能变化量应当是△Ek1=
-
(4) 乙同学按照甲同学的思路,根据实验数据得到F﹣
 的图线如图4所示,则其斜率k=.
的图线如图4所示,则其斜率k=.
-
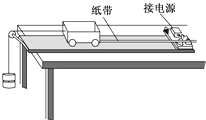
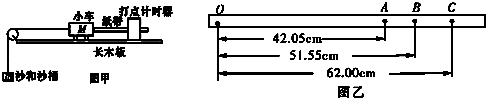
(1) 如图甲,在保持M>>m条件下,可以认为绳对小车的拉力近似等于沙和沙桶的总重力,在控制小车的质量不变的情况下进行实验.在实验中,该同学先接通打点计时器的电源,再放开纸带,已知交流电的频率为50Hz.如图乙是在m=100g,M=1kg情况下打出的一条纸带,O为起点,A、B、C为过程中的三个相邻的计数点,相邻的计数点之间有四个点没有标出,有关数据如图乙,则打B点时小车的动能为J,从开始运动到打至B点时,绳的拉力对小车做功W=J.(保留2位有效数字g=9.8m/s2)
-
(2) 在第(1)中绳的拉力对小车做功W大于小车获得的动能Ek , 请你举出导致这一结果的主要原因.(写出一种即可)
-
(1) 两同学中操作正确的是同学(填“甲”或“乙”).
-
(2) 下列操作正确规范的是 . (本题只有一个选项是正确的)A . 打点计时器接直流电源 B . 先释放小车,再接通电源 C . 需使用相同规格的橡皮筋 D . 改变橡皮筋条数后小车可从不同位置静止释放
-
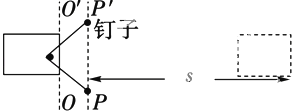
(3) 通过正确操作得到的一条纸带应为图(填“丙”或“丁”).
-
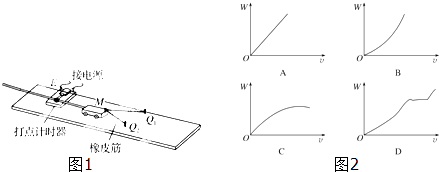
(1) 如果用一根橡皮筋将木块拉到OO′处,释放木块,橡皮筋对木块做的功为W,那么,当把三根相同的橡皮筋并起来将木块拉到OO′处,释放木块,橡皮筋对物体所做的功为;(图中两虚线间距离很小,摩擦不计)
-
(2) 用1,2,3,4,5根橡皮筋分别对木块做功,测得木块离开橡皮筋后滑行的距离为s1 , s2 , s3 , s4 , s5 . 以橡皮筋对木块做的功W为纵坐标,以滑行的距离s为横坐标,作出W﹣s图象是过原点的直线,那么W与v的关系是.
-
(1) 下列说法正确的是:A . 通过改变橡皮筋的条数改变拉力做功的数值 B . 通过改变橡皮筋的长度改变拉力做功的数值 C . 通过打点计时器打下的纸带来测定小车加速过程中获得的最大速度 D . 通过打点计时器打下的纸带来测定小车加速过程中获得的平均速度
-
(2) 通过实验获得较科学的数据作出的W﹣v图象,应为图2中的哪一个:

-
(1) 如图2是研究匀变速直线运动实验时得到的一条纸带,A、B、C、D为计数点,相邻两个计数点之间还有4个实际打点未画出,据此纸带可知小车在E点速度大小为
 ,小车加速度大小为
,小车加速度大小为  保留三位有效数字
保留三位有效数字  。
。
-
(2) 在“探究功与速度变化的关系”实验时,某实验小组同学利用细线拉力对小车做功,用打点计时器记录小车从静止释放后的运动情况,用刻度尺量取某个计数点到第一个点的距离x , 并算出该计数点的瞬时速度v , 则
 该小组同学实验前需要平衡小车的摩擦力吗?
该小组同学实验前需要平衡小车的摩擦力吗?  填“是”或“否” 。盘及盘中砝码的总质量m和小车质量M之间必须满足
填“是”或“否” 。盘及盘中砝码的总质量m和小车质量M之间必须满足  吗? 填“是”或“否”
吗? 填“是”或“否”  根据实验得到的x与v关系的多组数,我们要验证的是x与成正比。
根据实验得到的x与v关系的多组数,我们要验证的是x与成正比。
-
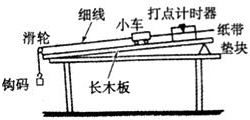
(1) 细线应该与长木板平面______ (填A或B);A . 平行 B . 不平行
-
(2) 是否需要平衡摩擦力______ (填A或B);A . 需要 B . 不需要
-
(3) 小车质量M与钩码质量m的关系应满足______ (填A或B).A . M<<m B . M>>m.

-
(1) 本实验方案(填“需要”或“不需要”)平衡小车受到的摩擦力;(填“需要”或“不需要”)钩码的质量远小于小车的质量;
-
(2) 如乙图是某次实验得到的一条纸带,纸带的运动方向是(填“从O到E”或“从E到O”)。
-
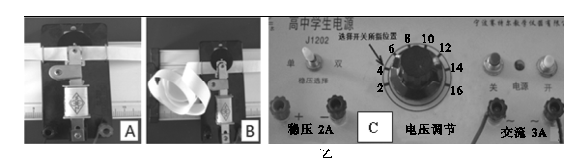
(1) 有两种工作频率均为50 Hz的打点计时器供实验选用:
A、电磁打点计时器
B、电火花打点计时器
为使纸带在运动时受到的阻力较小,应选择(选填“A”或“B”).
-
(2) 保持长木板水平,将纸带固定在小车后端,纸带穿过打点计时器的限位孔.实验中,为消除摩擦力的影响,在砝码盘中慢慢加入沙子,直到小车开始运动.同学甲认为此时摩擦力的影响已得到消除.同学乙认为还应从盘中取出适量沙子,直至轻推小车观察到小车做匀速运动.看法正确的同学是(选填“甲”或“乙”).
-
(3) 测出小车的质量为M,再测出纸带上起点到A点的距离为L.小车动能的变化量可用 ΔEk=
 算出.砝码盘中砝码的质量为m,重力加速度为g;实验中,小车的质量应(选填“远大于”“远小于”或“接近”)砝码、砝码盘和沙子的总质量,小车所受合力做的功可用W=mgL算出.多次测量,若W与ΔEk均基本相等则验证了动能定理.
算出.砝码盘中砝码的质量为m,重力加速度为g;实验中,小车的质量应(选填“远大于”“远小于”或“接近”)砝码、砝码盘和沙子的总质量,小车所受合力做的功可用W=mgL算出.多次测量,若W与ΔEk均基本相等则验证了动能定理.


-
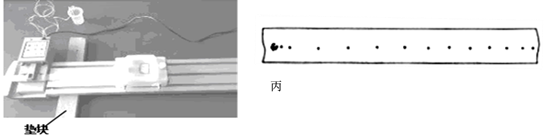
(1) 某学校使用的是电磁式打点计时器,在释放小车前,老师拍下了几个同学实验装置的部分细节图(如图乙所示),下列图中操作不正确的是(填序号)。
-
(2) 在滑板的左侧加一垫块,用以平衡摩擦阻力,如图丙所示。开启电源,轻推小车,打出了一条纸带,如图所示。据此纸带可判断,垫块应______。A . 向左移动一些 B . 向右移动一些 C . 保持不动
-
(3) 下图是某次实验测得的纸带的一段,可以判断纸带的(填“左”或“右”)端与小车连接,在打点计时器打下计数点9时(两计数点之间还有4个点),钩码的瞬时速度大小为m/s(保留两位有效数字)。
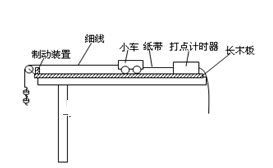
①将一块一端带有定滑轮的长木板固定在桌面上,在长木板的另一端固定打点计时器;
②把纸带穿过打点计时器的限位孔,连在小车后端,用细线跨过定滑轮连接小车和钩码;
③把小车拉到靠近打点计时器的位置,接通电源,从静止开始释放小车,得到一条纸带;
④关闭电源,通过分析小车位移与速度的变化关系来研究合外力对小车所做的功与速度变化的关系。下图是实验中得到的一条纸带,点O为纸带上的起始点,A、B、C是纸带的三个计数点,相邻两个计数点间均有4个点未画出,用刻度尺测得A、B、C到O的距离如图所示,已知所用交变电源的频率为50Hz,问:
-
(1) 打B点时刻,小车的瞬时速度vB= m/s。(结果保留两位有效数字)
-
(2) 本实验中,若钩码下落高度为
 时合外力对小车所做的功
时合外力对小车所做的功  ,则当钩码下落
,则当钩码下落  时,合外力对小车所做的功为。(用
时,合外力对小车所做的功为。(用  表示)
表示)
-
(3) 实验中,该小组同学画出小车位移x与速度v的关系图象如图所示。根据该图形状,某同学对W与v的关系作出的猜想,肯定不正确的是________(填写选项字母代号)
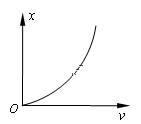 A . W∝v B . W∝v2 C . W∝
A . W∝v B . W∝v2 C . W∝ D . W∝v3
D . W∝v3
-
(4) 在本实验中,下列做法能有效地减小实验误差的是__________(填写选项字母代号)A . 把长木板右端适当垫高,以平衡摩擦力 B . 实验中控制钩码的质量,使其远小于小车的总质量 C . 调节滑轮高度,使拉小车的细线和长木板平行 D . 先让小车运动再接通打点计时器
-
(1) 有两种工作频率均为50 Hz的打点计时器供实验选用:
A、电磁打点计时器
B、电火花打点计时器
为使纸带在运动时受到的阻力较小,应选择(选填“A”或“B”). -
(2) 保持长木板水平,将纸带固定在小车后端,纸带穿过打点计时器的限位孔.实验中,为消除摩擦力的影响,在砝码盘中慢慢加入沙子,直到小车开始运动.同学甲认为此时摩擦力的影响已得到消除.同学乙认为还应从盘中取出适量沙子,直至轻推小车观察到小车做匀速运动.看法正确的同学是(选填“甲”或“乙”).
-
(3) 测出小车的质量为M,再测出纸带上起点到A点的距离为L.小车动能的变化量可用 ΔEk= 算出.砝码盘中砝码的质量为m,重力加速度为g;实验中,小车的质量应(选填“远大于”“远小于”或“接近”)砝码、砝码盘和沙子的总质量,小车所受合力做的功可用W=mgL算出.多次测量,若W与ΔEk均基本相等则验证了动能定理.

①在正确操作的情况下,交流电源的频率为50Hz,某次所打的纸带相邻两点间的距离如图2所示,在纸带上的点并不都是均匀的,为了测量橡皮筋做功后小车获得的速度,应选用纸带的部分进行测量(根据图2所示纸带上所标注的字母回答),小车获得的速度是m/s(结果保留两位有效数字)。
②根据实验数据做出  的图像如图3所示,图线不通过原点的原因是。
的图像如图3所示,图线不通过原点的原因是。

-
(1) 在实验中,下列说法正确的有___________。(填正确选项前的字母)A . 将木板的右端垫起,以平衡摩擦力 B . 用直尺测量细线的长度作为沙桶下落的高度 C . 在小车运动过程中,对于M、m组成的系统,m的重力做正功
-
(2) 图2是某次实验时得到的一条纸带,打点计时器使用频率为f的交流电。在纸带上相邻两计数点之间还有四个点未画出,根据此纸带可得出小车通过计数点E时的速度vE=。
-
(3) 若用B、E两点来研究合外力做功和动能变化的关系,需要验证的关系式为。(均用所测物理量的符号表示,重力加速度为g)
-
(1) 实验中,为了可以将弹簧对小车的弹力看成是小车所受的合外力,需要进行的一项必须且正确的操作是___________(选填选项前的字母)A . 将长木板的右端垫起适当的高度,撤去纸带,轻推一下小车,观察判断小车是否做匀速运动 B . 将长木板的右端垫起适当的高度,让小车连着已经穿过打点计时器的纸带,给打点计时器通电,轻推一下小车,从打出的纸带判断小车是否做匀速运动
-
(2) 在弹簧处于原长的情况下,标记小车右侧边缘(即弹簧左端)的位置O,然后用水平力推小车,将弹簧压缩,标记小车右侧边缘的位置A,测量即为弹簧的形变量x;给打点计时器通电,撤去推力,弹簧将小车推出。
图乙是在正确操作情况下打出的一条纸带,已知相邻两点打点时间间隔为0.02s则小车获得的最大速度v=m/s(保留3位有效数字)。

-
(3) 在弹簧弹性范围内改变弹簧形变量x,得到了若干组x与小车最大速度v的数据,并求出小车动能
 。利用数据首先绘制
。利用数据首先绘制  图像,如图丙A所示;进一步利用数据又绘制出
图像,如图丙A所示;进一步利用数据又绘制出  图像,如图丙B所示。结合图像及能量守恒定律,则弹簧弹性势能与形变量的关系是。
图像,如图丙B所示。结合图像及能量守恒定律,则弹簧弹性势能与形变量的关系是。 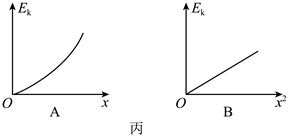
-
(1) 用游标卡尺测遮光条的宽度d,下列操作中正确的是。

-
(2) 将气垫导轨放在水平桌面上,导轨一端用小木板垫高,测出导轨的长度L和两端高度差H;在导轨上安放光电门1和2,连接数字计时器,并测出两光电门的距离x;打开气源,释放质量为m的滑块,读出遮光条先后通过光电门的时间t1和t2
请回答下列问题:
①写出滑块通过两光电门的动能增量ΔEk=。
②某同学测量多组数据,用作[(
 )2-(
)2-(  )2]与x图像的方法处理实验数据,以此减小实验误差,他的操作方法应是。
)2]与x图像的方法处理实验数据,以此减小实验误差,他的操作方法应是。A.两光电门的距离不变,改变导轨的倾角
B.导轨的倾角不变,改变两光电门的距离
C.两光电门的距离改变,同时改变导轨的倾角
D.两光电门的距离、导轨的倾角不变,改变释放位置
③上述图像中直线的斜率为k,则当地重力加速度g=。
-
(3) 测量发现重力加速度比当地的实际值大些,可能的原因是________。A . 阻力的影响 B . 导轨长度的测量偏大 C . 导轨高度差的测量偏小
- 下列句中有语病的一项是( )(2分) A.杭州地铁的开通,必将有助于解决杭州及周边地区交通拥堵的现状。 B.世界月
- —I’m sorry I didn't make it to your party last night.( ) —_
- “你是素日知道我的,从来不信什么是阴司地狱报应的。凭是什么事,我说要行就行。”“你瞧瞧我忙的,那一处少了我。既应了你,自
- 对任意实数a、b、c,在下列命题中,真命题是( )A.“ac>bc”是“a>b”的必要条件B.“ac=bc”是“a
- 氢原子从第4能级跃迁到第2能级能发出蓝光,那么,当氢原子从第5能级跃迁到第2能级时应发出( )A.X射线
- 电视剧《大染坊》叙述了20世纪初陈寿亭从一个“叫花子”发展到拥有雄厚资产的印染 厂老板的创业历程。该片的主题歌唱到“总以
- 已知与的值互为倒数,则的值为( ) (A)-1 (B)0 (C)
- 宇宙中有这样一种三星系统,系统由两个质量为m的小星体和一个质量为M的大星体组成,两个小星体围绕大星体在同一圆形轨道上运行
- 下列命题正确的是( ). A.
- 直线y=kx+1与圆x2+y2-2y=0的位置关系是().A.相交 B.相切 C.相离
- 不等式对任意恒成立,则实数的取值范围为A. B. C. D.
- 下列句子中加点词的解释全部正确的一项是 A.乃不知有汉(竟然) 学而不厌(满足) 裨补
- 据国际天文联合会和紫金山天文台预测,2009年7月22日上午将发生数百年内最为壮观的日全食天象。当天,全食带先后经过了西
- 右表为元素周期表中短周期的一部分,Y元素最高正价与最低负价的代数和为4,下列叙述正确的是A.原子半径: W<X&l
- (6分)以下物理学知识的相关叙述,其中正确的是(选对一个给3分,选对两个给4分,选对三个给6分。选错一个扣3分,最低得分
- 两个等值电阻串联在220伏的电源上时,总电阻为Rl,消耗的总功率为P1;并联在110伏的电源上时,总电阻为R2,消耗的总
- 下图为某工厂发展变化示意图,回答该工厂从阶段Ⅰ发展到阶段Ⅱ反映了A.市场对工业区位的影响逐步增强B.交通运输已不再成为影
- 在画有指向标的地图上,确定方向的根据是 A.指向标 B.经纬线 C.上北下南,左西右东 D.任
- 在下列生活现象中,不是平移现象的是( )A.站在垂直上升的电梯里的人 B.左右推
- 说“1977年和1978年,中国还处于徘徊状态。”其主要原因是( ) A.“两个凡是”的方针仍占主导地位 B.“”



