浙江强基联盟2023-2024学年高三上学期通用技术9月联考卷
浙江强基联盟2023-2024学年高三上学期通用技术9月联考卷
教材科目:通用技术
试卷分类:高三上学期
文件类型:.doc
发布时间:2026-07-01
授权方式:免费下载
下载地址:点此下载
教材科目:通用技术
试卷分类:高三上学期
文件类型:.doc
发布时间:2026-07-01
授权方式:免费下载
下载地址:点此下载
以下为试卷部分试题预览
| 1. 单选题 | 详细信息 |
如图所示的一款恒温内热式电烙铁,采用了无级调温、保温控 制等技术。夹头与电烙铁头连接接地。内有指示灯,刚加热时发出 红光,达到设定温度时发出绿光。接线出口处有柔软绝缘套管保护。 根据图及描述完成问题。
|
|

| 2. 单选题 | 详细信息 |
小明学习了“朱德的扁担”一文后,采用一根大小合适的杂木,设计了下列四种扁担的方案。其中 承重能力最强的是( )
A .
|
|
| 3. 单选题 | 详细信息 |
小明学习了工艺之后,准备用厚度 10cm 尺寸合适的钢板加工一个如图 a 的拱桥模型,尺寸如图b,下列分析和操作中合理的是( )
A . 根据图中所标尺寸就能够加工出拱桥模型
B . 左上角的加工流程可以为:划线→锯割→锉削
C . 加工Φ10 圆孔时,可选用Φ9.5 的钻头钻孔后再用圆锉锉削而成
D . 加工 R100 圆弧时,先用钢丝锯锯割然后用半圆锉锉削
|
|
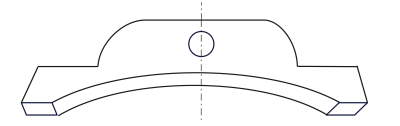 图 a
图 a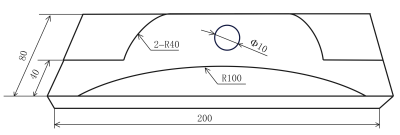 图 b
图 b| 4. 单选题 | 详细信息 |
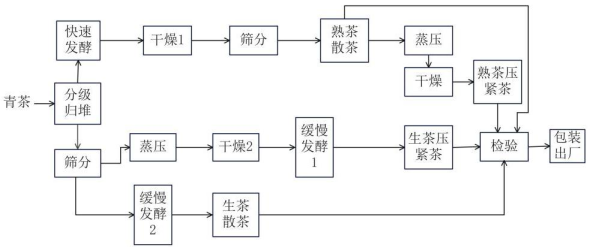
如图所示是某茶厂的生产工艺流程图。下列对该流程的分析中,正确的是( )
A . 为了节约时间,缓慢发酵1和缓慢发酵2可以合并一处
B . 干燥2和缓慢发酵1的时序可以颠倒
C . 快速发酵和缓慢发酵2是并行工序
D . 四种茶的生产都需要经过蒸压环节
|
|
| 5. 单选题 | 详细信息 |
如图所示是一款家用人字梯,实木制作,可以折叠。 下列对人字梯的分析中正确的是( )
A . 当人站在横档上时,横档主要受压、支柱主要受弯曲
B . 横档与支柱采用榫接主要目的是提高结构的稳定性
C . 使用连杆与安装孔连接加固,该人字梯既可以当“A 字梯”也可以当“一字梯”使用
D . 不用时可以折叠减小储存空间主要考虑了物的因素
|
|

| 6. 单选题 | 详细信息 |
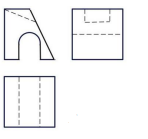
如图所示是某形体的三视图。俯视图中漏画的投影线共有 ( )
A . 2 处
B . 3 处
C . 4 处
D . 5 处
|
|
| 7. 单选题 | 详细信息 |
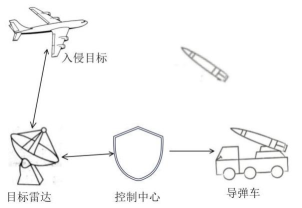
如图是一个简单的导弹防御系统的示意图。目标雷达不间断扫描,假设雷达在某一个时刻发现有敌方目标进入其领空,它会马上跟踪这个目标并通 知控制中心,控制中心根据目标的飞行情况计算出飞行轨迹,预测目标某一时刻的方位,最后控制导弹车发射导弹,从而在某个预测点成功地将其击落。 根据图和描述完成问题。
|
|
| 8. 单选题 | 详细信息 |
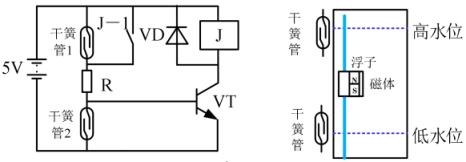
如图是小明设计的水位自动控制电路,当水位低于低水位时继电器吸合注水,但水位达到高水位时继电器释放停止注水(水泵工作电路未画出,小磁铁随着水位升降而升降)。关于该电路,下 列分析合理的是 ( )
A . 干簧管 1 应放在高水位处
B . 可以选择额定工作电压是 20V 的继电器
C . 电阻 R 用导线直接短接,电路仍能正常工作
D . 三极管断路瞬间,二极管起保护三极管的作用
|
|
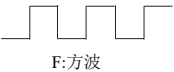
| 9. 单选题 | 详细信息 |
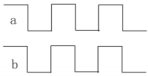
如图所示的信号处理电路中,a、b 为输入 信号,F 为输出信号,要求输出如图所示的 方波,下列输入波形中符合要求的是 ( )
A .
 B .
B . 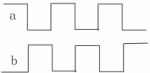 C .
C . 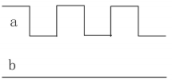 D .
D . 
|
|
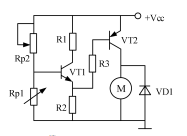
| 10. 单选题 | 详细信息 |
小明设计了如图所示的速度控制电路,RP2 的滑动触头 与电动机的速度相关,当速度变化时向下或向上滑动,从而 实现电动机的速度恒定。下列分析中正确的是 ( )
A . 电动机速度超过设定值时 RP2 滑动触头下移
B . 只调大 Rp1 的阻值,速度的设定值变大
C . 增加 R1 的阻值,速度的设定值一定减小
D . R3 的变化不影响速度的设定值
|
|
高中通用技术 试卷推荐
- 浙江省温州市十五校联合体2020-2021学年高二上学期通用技术期中联考试卷
- 重庆市普通高中高职分类招生考试2021年通用技术模拟试卷(一)
- 浙江省浙南名校联盟2021-2022学年高三上学期通用技术10月第一次联考试卷
- 浙江省普通高等学校招生2021年1月通用技术选考试卷
- 贵州省兴仁市凤凰中学2020-2021学年高一上学期通用技术期末考试试卷
- 浙江省万全综合高中2021-2022学年高二下学期通用技术期中考试试卷
- 浙江省A9协作体2021-2022学年高二上学期通用技术期中联考试卷
- 浙江省平阳县万全综合高中2021-2022学年高二上学期通用技术第一次月考试卷
- 云南省红河县第一中学2021-2022学年高一上学期通用技术期中考试试卷
- 浙江省绍兴市上虞区2020-2021学年高二上学期通用技术期末教学质量调测试卷
- 浙江省2022届高三通用技术选考模拟试卷(五)
- 浙江省温州市10校联考2021-2022学年高二下学期通用技术期末联考试卷
最近更新
- 下图为日本及其附近海域震源深度分布示意图。读图回答22~23题。22.日本及其附近海域震源深度的分布特点是 ( )
- 如图所示,在△ABC中,AB=AC,AD=AE,∠BAD=60°,则∠EDC=______.
- --- I hate cities. The roads are dirty and they are always c
- This is the mostbeautiful garden _____ I have ever seen. A.w
- 填写下列名篇名句中的空缺部分。(8分) 13.(1) , ;不积小流,无以成江海。
- 仿写两个句子。 例句:我喜欢婉约中透出英气的李清照,虽是“人比黄花瘦”,但也有高歌“不肯过江东”的豪情。
- 将一盏电灯放在桌子上代表太阳,在电灯旁放置一个地球仪代表地球,拨动地球仪模拟 地球运动,回答24~25题。24.该实验能
- 阅读材料回答问题“在无穷的远方,有无数的人,都同我有关。”时下,网络正演绎着鲁迅的这句话,一些穷追不舍的网民以道德守护者
- The flu is believed by viruses that like to reproduce in
- 世界上跨经度最广的大洲和大洋是 ( ) A.南极洲和北冰洋 B.亚洲和太平洋 C
- 选用厨房中的下列物质填空(填序号): ①保鲜膜 ②铁锅 ③砂糖④食盐 ⑤蔬菜 ⑥小麦粉
- After graduation went to Nigeria but when I first set foot o
- 如图甲所示,用一水平力F拉着一个静止在倾角为q的光滑斜面上的物体,逐渐增大F,物体做变加速运动,其加速度a随外力F变化的
- 直线y=ax+2和直线y=bx-3交于x轴同一点,则a与b的比值是________.
- 结合下列曲线,有关无机物在生物体内含量的说法,错误的是 ()A.曲线①可表示人一生中体内自由水与结合水的
- 漫画《望房兴叹》的原因可能是 ①大多数人当前收入偏低②房价过高③国家加大对房地产行业的调控④商品房供过于求 A.
- 设阿伏伽德罗常数的数值为NA,下列说法正确的是()A.1.8g NH4+含有的电子数为NA
- 如果黄赤交角变大 A.太阳直射点移动的范围没有变化 B.热带范围缩小 C.温带范围缩小
- 下列有关太阳直射点的说法,不正确的是 A.春分日和秋分日两天,太阳光线直射赤道 B.夏至日太阳光线直射北回归线 C.冬至
- 一个正方体被一个平面截去一部分后,剩余部分的三视图如右图,则截去部分体积与剩余部分体积的与剩余部分体积的比值为 (A)



