2025届浙江省强基联盟高三下学期三模技术试题-高中通用技术
2025届浙江省强基联盟高三下学期三模技术试题-高中通用技术
教材科目:通用技术
试卷分类:高考阶段
文件类型:.doc
发布时间:2026-07-01
授权方式:免费下载
下载地址:点此下载
教材科目:通用技术
试卷分类:高考阶段
文件类型:.doc
发布时间:2026-07-01
授权方式:免费下载
下载地址:点此下载
以下为试卷部分试题预览
| 1. 单选题 | 详细信息 |
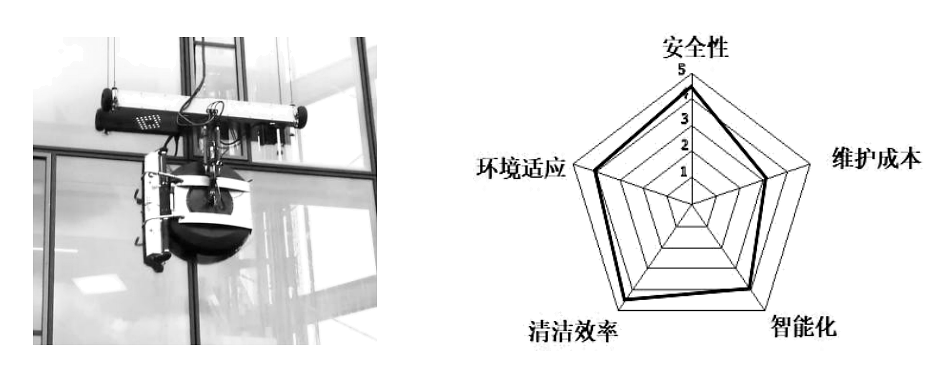
如图所示为一款高空外立面玻璃幕墙清洗机器人及其评价图。根据评价图,下列分析不恰当的是( )
A . 安全性好
B . 维护成本低
C . 适用场合多
D . 清洁效率高
|
|
| 2. 单选题 | 详细信息 |
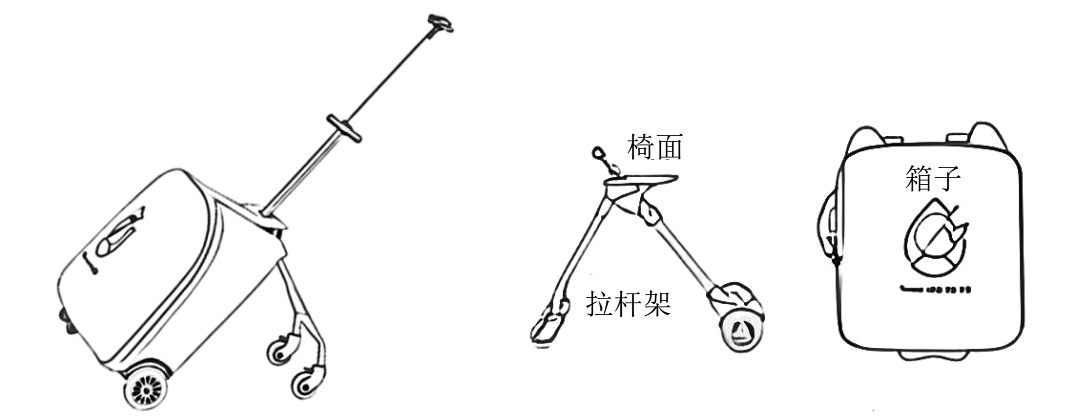
如图所示的可拆卸拉杆箱,拉杆架与箱子可分离;伸缩式拉杆下配有座椅,外出旅游时可为儿童使用。下列从人机关系角度的分析,不恰当的是( )
A . 按压式一键分离箱子与拉杆架,实现了高效目标
B . 多款颜色可选,考虑了人的心理需求
C . 儿童椅面的高度,考虑了人的静态尺寸
D . 拉杆可以伸缩,实现了安全目标
|
|
| 3. 单选题 | 详细信息 |
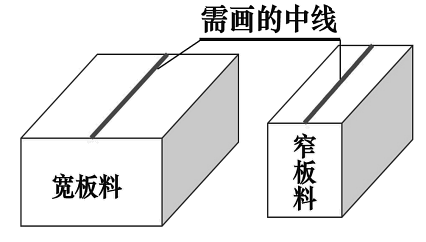
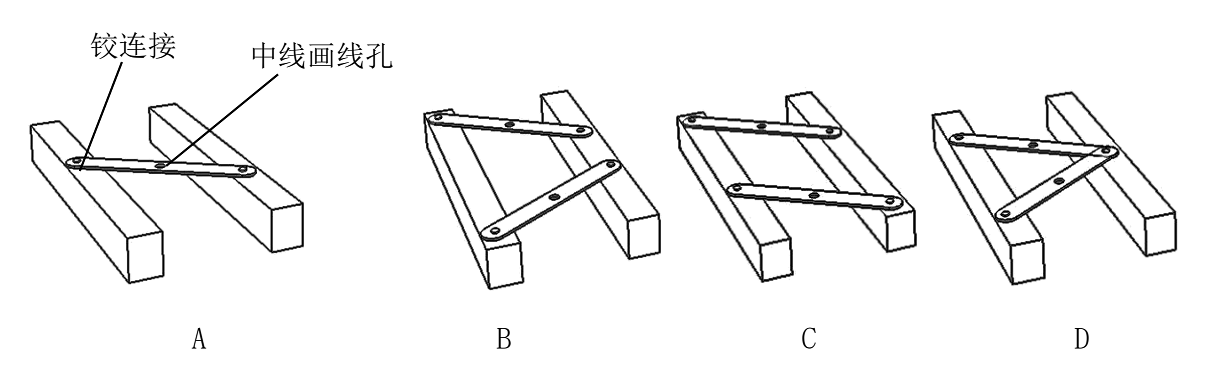
小明经常要在不同厚度的长方形木板上绘制中线,他构思了如图所示能帮助他快速绘制中线的四个辅助工具方案,其中最合理的是( )
A . A
B . B
C . C
D . D
|
|
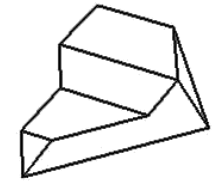
| 4. 单选题 | 详细信息 |
下列形体中,与如图所示的三视图对应的是( )
A .
 B .
B . 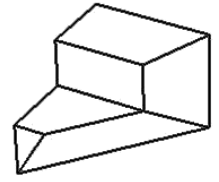 C .
C . 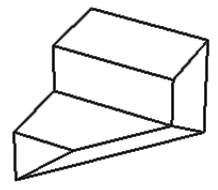 D .
D . 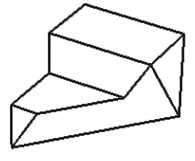
|
|
| 5. 单选题 | 详细信息 |
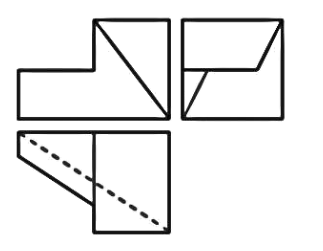
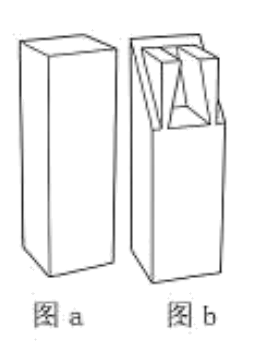
在通用技术实践课中,小明准备把如图a所示的木条加工成如图b所示的榫卯结构。下列选项不恰当的是( )
A .
 B .
B .  C .
C .  D .
D . 
|
|
| 6. 单选题 | 详细信息 |
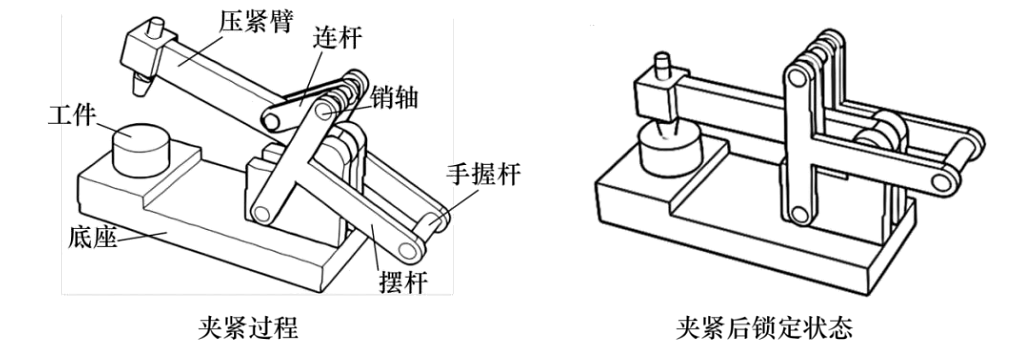
如图所示的夹紧机构,手握杆在力F的作用下,带动摆杆和连杆运动,使压紧臂转动压紧工件。以下针对工件夹紧过程与工件夹紧后的主要受力形式分析中,正确的是( )
A . 摆杆在夹紧过程受弯曲,夹紧后受拉
B . 连杆在夹紧过程受压,夹紧后受拉
C . 压紧臂在夹紧过程受弯曲,夹紧后受压
D . 销轴在夹紧过程受剪切,夹紧后受扭转
|
|
| 7. 单选题 | 详细信息 |
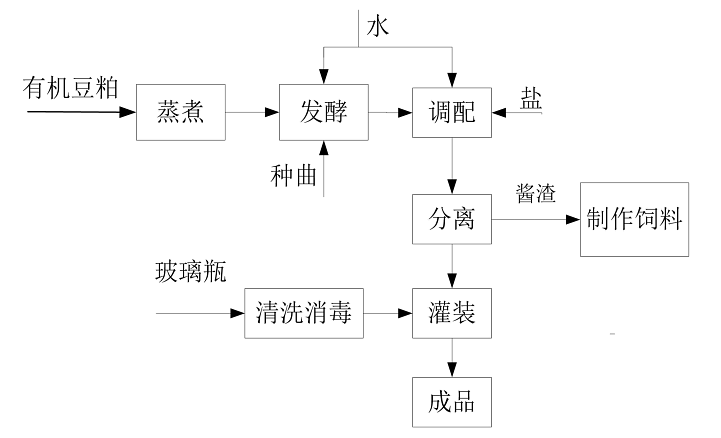
如图所示是某酱油生产工艺流程图,下列对该流程的分析中不正确的是( )
A . 酱渣制作饲料提高资源利用率
B . 有机豆粕经浸泡后更容易蒸煮
C . 水同时加到发酵和调配环节,发酵和调配是并行工序
D . 玻璃瓶清洗消毒不会影响发酵质量
|
|
| 8. 单选题 | 详细信息 |
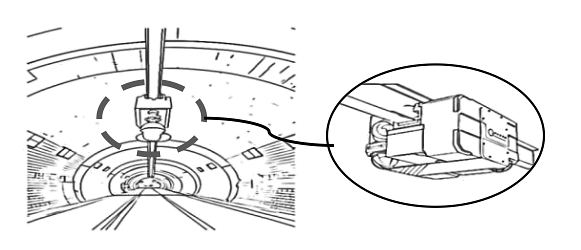
为保障公路隧道的安全及应急处理,某公司设计了隧道“智能巡检机器人”。当“智能巡检机器人”接收到固定摄像头的事故信息,能迅速沿轨道运行至事发点,捕捉画面并分析情况。若发现人员伤亡或毒气泄漏,通过语音提醒并引导人群疏散;自动控制隧道口“禁止驶入”警示灯亮起;同时向控制平台发送警报信息。请根据描述完成以下小题。
|
|
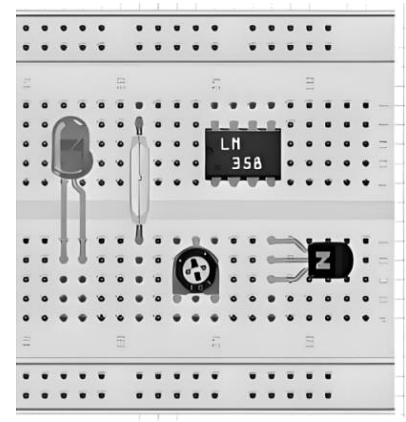
| 9. 单选题 | 详细信息 |
在通用技术实践课中,小明在面包板上插装了如图所示的电位器、三极管、运算放大器、干簧管、发光二极管。其中插装不正确的个数是( )
A . 1个
B . 2个
C . 3个
D . 4个
|
|
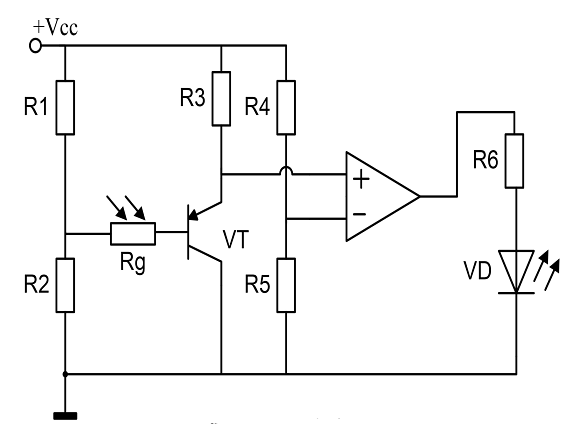
| 10. 单选题 | 详细信息 |
如图所示的光线强弱指示电路,光较暗时VD发光,光较亮时VD熄灭。下列分析不正确的是( )
A . VD熄灭的瞬间,VT处于放大状态
B . 适当增大R3的阻值,可以降低光强的设定值
C . 适当减小R5的阻值,可以提高光强的设定值
D . 减少R3的阻值,流过VD的电流增大
|
|
高中通用技术 试卷推荐
- 浙江省2020年普通高校招生选考科目考试通用技术模拟卷4
- 重庆市2020年高等职业教育分类通用技术模拟测试卷(三)
- 浙江省丽水市发展共同体2019-2020学年高二下学期通用技术期中考试试试卷
- 海南省临高县临高中学2019-2020学年高一上学期通用技术期末考试试卷
- 浙江省十校联盟2020届高三上学期通用技术10月联考试卷
- 浙江省绍兴市2020届高中通用技术4月二模
- 安徽省合肥市肥东县合肥新城高升学校2019-2020学年高二上学期通用技术期中考试素养试卷通用技术
- 浙江省2015年9月普通高等学校招生统一考试通用技术试卷
- 浙江省金华市江南中学2020届高三网课3月14日第五周通用技术测试卷
- 浙江省杭州市2015年高考模拟命题比赛通用技术试卷(6)
- 重庆市2020年高等职业教育分类通用技术模拟测试卷(一)
- 浙江省衢州市开化县华埠中学2018-2019学年高二下学期通用技术月考试卷
最近更新
- 下列实验能形成乳浊液的是() A.把碘与水混合B.把高锰酸钾与水混合 C.水和植物油混合用力振荡D.乙醇溶于水
- 国民大革命兴起的直接条件是( ) A.革命统一战线的正式建立 B.中国工人运动出现第一次高潮 D.广东革命根据地的
- 简答题(10分) (1)下面这些个性化的语言分别出自名著中哪些人物之口?(5分) ①生子当如孙仲谋,若刘景升儿子,豚犬耳
- 右图反映的灌溉工具或技术是: A.都江堰 B.井渠 C.郑国渠 D.白渠
- (2012年高考(辽宁文))在长为12cm的线段AB上任取一点 C. 现作一矩形,邻边长分别等于线段AC
- 在香豌豆中,只有当C、R两个显性基因同时存在时,花色才为红色。一株红花植株与一株基因型为ccRr的植株杂交,子代有3/8
- 关于“铝热反应”的现象有这样的描述:“反应放出大量的热,并发出耀眼的光芒。”“纸漏斗的下部被烧穿,有熔融物落入沙中。”又
- – Lisa, why are you still here? School is over. – I ____
- 定义:到三角形的两个顶点距离相等的点叫做三角形的准外心.如图1,若PA=PB,则点P是△ABC的准外心. (1)如图2,
- 补填下列名句名篇中的空缺部分。(任选两小题)(4分)(1)老当益壮,________;穷且益坚,________。(唐・
- 血管分动脉、静脉和毛细血管三种。下面对静脉的描述正确的是 A.运输静脉血的血管 B.将血液
- 下列粒子在溶液中能大量共存的一组是( ) A.H+、Fe2+、SO42-、C12 B.K
- 《红楼梦》又称《______》、《_______》、《_______》、《_________》。
- 将下列6句话按照合理的顺序填在横线上,使之成为语意连贯的一段话。 (只填序号) 在历史上诗与乐有很久远的渊源,在起源时它
- 下列实验装置设计正确且能达到目的的是
- 2011年,广东深入开展治理“两委”换届选举违纪违法案件专项工作,及时查处了一批违反换届 选举纪律的违纪违法案件,有效地
- 为探究小灯泡L的伏安特性,连好图示的电路后闭合开关,通过移动变阻器的滑片,使小灯泡中的电流由零开始逐渐增大,直到小灯泡正
- 现有甲、乙、丙三种金属,分别与空气和氧气反应,现象如下表所示:甲 乙 丙 空气 剧烈燃烧 变黑 变黑 氧气 更剧烈燃烧
- 简述“海棠社”或“菊花社”的主要情节。
- — Where did Jane go just now? — Idon’t know. When



