浙江省台州市八校联盟2022-2023学年高二下学期通用技术4月期中联考试卷
浙江省台州市八校联盟2022-2023学年高二下学期通用技术4月期中联考试卷
教材科目:通用技术
试卷分类:高二下学期
文件类型:.doc
发布时间:2026-07-01
授权方式:免费下载
下载地址:点此下载
教材科目:通用技术
试卷分类:高二下学期
文件类型:.doc
发布时间:2026-07-01
授权方式:免费下载
下载地址:点此下载
以下为试卷部分试题预览
| 1. 单选题 | 详细信息 |
2023年2月16日,国内首例5G超远程机器人肝胆手术成功实施。浙江大学医学院主任医师梁霄在杭州通过国产原研微创手术机器人操作台,向新疆兵团阿拉尔医院手术室内的机械臂发出手术指令,成功为一名当地患者实施了胆囊切除术。下列关于该技术的描述中不恰当的是( )
A . 5G技术的内容和体系复杂,体现了技术的复杂性
B . 机器人手术术后恢复快、并发症发生率低,体现了技术的目的性
C . 四臂腔镜机器人的研发过程中要考虑网络卡顿等多种因素,体现了技术的综合性
D . 5G技术的不断发展为超远程手术机器人的出现奠定了基础,说明技术发展对设计产生重要影响
|
|
| 2. 单选题 | 详细信息 |
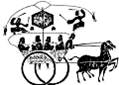
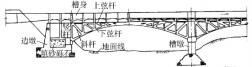
如图所示是汉代画像里的记里鼓车,记里鼓车是我国古代对齿轮系运用的典范。据载,车行一里下层木人击鼓,行十里上层木人击镯。下列关于该车的分析与评价不合理的是( )
A . 齿轮系结构使车可以记下行驶里程,说明功能的实现需要相应的结构来保证
B . 通过击鼓和击镯,驾车人可以清晰的记住所行驶的路程,实现了人机关系的信息交互
C . 木人可以击鼓和击镯,符合设计的技术规范原则
D . 鼓车的计程原理与现代里程表相同,但早发明了 1600 多年,体现了中国古人智慧的博大精深
|
|
| 3. 单选题 | 详细信息 |
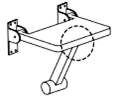
如图所示为一款墙角折叠椅,虚线框处可拆卸,下列方案中结构最合理的是( )
A .
 B .
B . 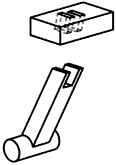 C .
C .  D .
D . 
|
|
| 4. 单选题 | 详细信息 |
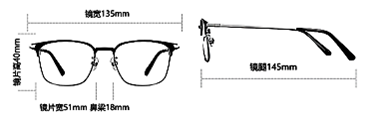
如图是一款中学生近视眼镜。以下哪一项考虑的不是人的静态尺寸( )
A . 鼻梁垫片间距 18mm
B . 镜脚长 145mm
C . 镜宽 135mm
D . 镜片高度 40mm
|
|
| 5. 单选题 | 详细信息 |
如图所示渡槽通常是一种使水流跨越河渠、溪谷、洼地和道路的架空水槽。测试渡槽模型的抗弯曲性能时,将模型悬空放置在两条相距20cm的凳子上,在模型中间逐步增加重物,直至模型发生断裂、倾斜或最大弯曲变形超过5mm,记录承重数据。此测试采用的技术试验方法是( )
A . 模拟试验法
B . 强化试验法
C . 虚拟试验法
D . 优选试验法
|
|
| 6. 单选题 | 详细信息 |
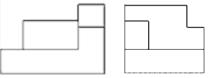
如图所示是该形体的主视图和左视图,相对应的俯视图是( )
A .
 B .
B .  C .
C .  D .
D . 
|
|
| 7. 单选题 | 详细信息 |
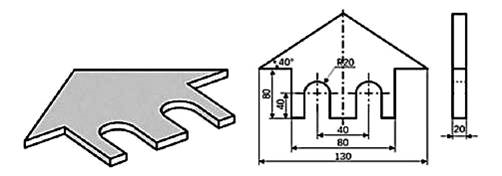
通用技术实践课上, 小明设计了如图所示的零件。请根据图完成小题。
|
|
| 8. 单选题 | 详细信息 |
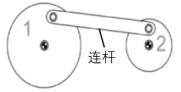
如图所示是车轮连杆机构简图,工作时以其中一轮为主动轮(提供动力),另一轮为从动轮,下列对其工作时连杆的受力情况描述正确的是( )
A . 2为主动轮,当其顺时针转动时,连杆受弯曲
B . 1为从动轮,当其顺时针转动时,连杆受拉
C . 1为从动轮,当其逆时针转动时,连杆受扭转
D . 2为从动轮,当其逆时针转动时,连杆受压
|
|
| 9. 单选题 | 详细信息 |
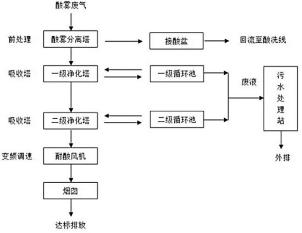
如图所示为酸雾废气处理工艺流程,下列说 法正确的是( )
A . 一级净化塔和二级净化塔的作用一样可合并为同一工序
B . 酸雾分离塔与二级循环池是并行环节
C . 烟囱排放和污水外排是串行环节
D . 一级循环池和二级循环池时序不可以颠倒
|
|
| 10. 单选题 | 详细信息 |
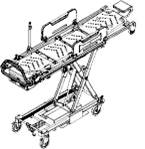
如图所示, 该担架车用于抗震救灾中,在野外无路情况下救护伤病员。其工作原理是通过陀螺仪来检测担架的重力垂直度信号传给单片机,并通过单片机产生脉冲信号驱动伺服电机,由伺服电机调整角度来控制担架车的前、后、左、右四个方向从而维持水平。请根据示意图和描述完成小题。
|
|
高中通用技术 试卷推荐
- 浙江省普通高中2021年学业水平考试通用技术模拟卷(6)
- 贵州省贵阳市普通中学2020-2021学年高二上学期通用技术期末检测试卷
- 浙江省“山水联盟”2021届高三上学期通用技术开学考试试卷
- 云南省玉龙纳西族自治县田家炳民族中学2020-2021学年高一上学期通用技术期中考试试卷
- 浙江省9+1高中联盟2020-2021学年高三上学期通用技术期中考试试卷
- 浙江省“七彩阳光”新高考研究联盟2021届高三上学期通用技术返校联考试卷
- 重庆市江津学校2021-2022学年高二下学期通用技术期中考试试卷
- 红星中学2022年通用技术学业5月水平考试试卷
- 浙江省普通高校招生2022年1月通用技术选考试卷
- 浙江省温州十校联合体2021-2022学年高二上学期通用技术期中考试试卷
- 山西省太原市2020-2021学年高一下学期通用技术期末考试试卷
- 浙江省北斗星盟2021-2022学年高二下学期通用技术5月阶段性联考试卷
最近更新
- 被称为“史上最严交规”的新交通规则于2013年1月1日起正式施行。新交规对于闯红灯、超速、故意遮挡污损号牌等交通违法行为
- 已知双曲线C:-=1的离心率e=,且其右焦点为F2(5,0),则双曲线C的方程为() A.-=1
- 下列生理活动所涉及的相关激素之间的关系,与实际不相符合的是 A.食物过咸时,抗利尿激素与醛固酮对细胞外液渗透压的调节,
- ......
- ---Fang Yong-gang was given ______ honor of being one of the
- 读我国某城市1979~2003年年末从业人员数及本市生产总值图,回答目前该城市产业发展正逐渐丧失的区位优势是A.地租
- 在文明突飞猛进的20世纪,为什么野蛮残暴的法西斯主义能够猖獗一时?原因包括 ①统治阶级的大力支持 ②经济危机的沉重打击
- 1. Don’t be afraid of asking for help _______ it is needed.
- 课内文言阅读 伏惟圣朝以孝治天下。凡在故老,犹蒙矜育;况臣孤苦,特为尤甚。且臣少事伪朝,历职郎署,本图宦达,不矜名节。今
- 在下列横线上依次填上词语,最恰当的一项是 (1)从窗内往外看时,那一朵白莲已经谢了,白瓣儿小船般____________
- 下列关于生态系统中物质循环和能量流动的叙述,正确的是 A.富营养化水体出现蓝藻水华的现象,可以说明能量流动的特点 B.生
- 非空集合中的元素个数用表示,定义. 若,,且,则的所有可能值为( ) A. B. C. D
- 词汇运用;根据首字母提示及句意写出正确的单词。 1.Hehas lived in France for many yea
- 下列说法正确的是A.明矾和漂白粉常用于水处理,两者的作用原理相同B.利用潮汐发电是将化学能转化为电能C.铝合金的大量使用
- 一种从植物中提取的天然化合物a-damascone,可用于制作“香水”,其结构为: ,有关该化合物的下列说法不正确的是
- Give the spelling of the following according to the meaning.
- Ⅰ.(1)在用游标为10分度的游标卡尺测某金属棒的直径时,示数如图所示,读数为_______cm。(2)在测定金属丝的电
- 读长江流域图,回答下列问题。(1)、长江发源于_________________ 山脉,流经青藏高原、云贵高原、____
- 如图,为了测量出楼房AC的高度,从距离楼底C处60米的点D(点D与楼底C在同一水平面上)出发,沿斜面坡度为i=1:的斜坡
- 新华网北京10月22日电:中国人民银行22日宣布,自2008年10月27日起,将商业性个人住房贷款利率的下限扩大为贷款基



