浙江省宁波市金兰教育合作组织2020-2021学年高二上学期通用技术期中考试试卷
浙江省宁波市金兰教育合作组织2020-2021学年高二上学期通用技术期中考试试卷
教材科目:通用技术
试卷分类:高二上学期
文件类型:.doc
发布时间:2026-07-01
授权方式:免费下载
下载地址:点此下载
教材科目:通用技术
试卷分类:高二上学期
文件类型:.doc
发布时间:2026-07-01
授权方式:免费下载
下载地址:点此下载
以下为试卷部分试题预览
| 1. 单选题 | 详细信息 |
|
自行车在加速过程中,下列关于各零部件的主要受力形式分析不正确的是( )
A . 曲柄受弯曲
B . 中轴受扭转
C . 脚蹬受压
D . 链条受拉
|
|

| 2. 单选题 | 详细信息 |
|
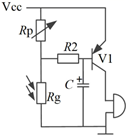
如图所示是一光控报警电路,在电路没有用到电子元件有( )
A . ①⑤⑧
B . ②③⑦
C . ③④⑦
D . ④⑥⑧
|
|

| 3. 综合题 | 详细信息 |
|
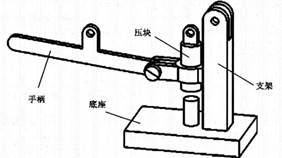
如图所示为某压紧机构的一部分,其中手柄与支架、压块之间的连接部分损坏了,连接部分的连接孔直径都是6mm,转动支架时,手柄上的孔和支架上的孔的间距在300mm- 500mm 范围内变化。请你用2mm厚的钢条,设计一个传动机构,设计要求如下:
A.能将手柄、支架和压块连接在一起; B.能实现手柄往下压时,压块往下运动;手柄往上提时,压块往上运动; C.有较好的强度。
请根据描述和设计要求完成以下任务:
|
|
| 4. 单选题 | 详细信息 |
|
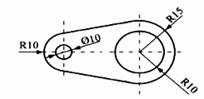
如下图所示的尺寸标注,错标与漏标各有( )
A . 2处,2处
B . 2处,1处
C . 3处,2处
D . 3处,1处
|
|
| 5. 单选题 | 详细信息 |
|
第五代移动通信网络,简称5G,是最新一代蜂窝移动通信技术。5G网络的数据传输速率最高可达10Gbps,比先前的4G网络快100倍。5G网络技术可减少延迟、节省能源、降低成本、提高系统容量和大规模设备连接。以下说法错误的是( )
A . 5G技术比4G技术通讯传播速度更快,延时更短,体现了技术的创新性
B . 5G技术研发时必须满足国际电联规定的ITU IMT 2020要求和标准,体现了设计的技术规范原则
C . 5G网络的传输速率可达10Gbps,手机用户在十秒时间内即可完成部高清电影的下载,体现了技术解放人的作用
D . 5G网络传输速率过快,导致用户流量超标,体现了技术的两面性
|
|
| 6. 单选题 | 详细信息 |
|
嫦娥4号搭载了棉花、油菜、土豆、拟南芥、酵母和果蝇六种生物,将它们的种子和虫卵带到月球上进行培育,展开了人类在月球表面进行的首次生物技术试验,该技术试验方法属于( )
A . 移植试验法
B . 模拟试验法
C . 虚拟试验法
D . 优选试验法
|
|
| 7. 单选题 | 详细信息 |
|
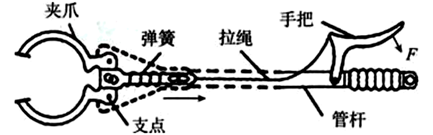
如图所示是一个捡拾器结构示意图,主要方便清洁工对垃圾的捡拾。手柄上装着手把,通过钢丝能够控制夹爪;夹爪内侧有防滑齿,有复位弹簧。以下的设计是从“物”的角度考虑的是( )
A . 夹爪的防滑齿
B . 手把有一定弧度
C . 手把装在握把上方一定距离处
D . 手把通过拉绳控制夹爪张口大小
|
|
| 8. 单选题 | 详细信息 |
|
如图所示的三脚架,在使用过程中与稳定性无关的是( )
A . 三脚架脚架底部的挂钩可以挂重物
B . 尽量通过拉长脚管升高相机,避免抬升中轴
C . 三脚架的三个脚竹尽量完全张开
D . 三脚架的脚管由几根粗细不同的空心钢管组成,尽量避免使用最末端的那节小脚管
|
|

| 9. 单选题 | 详细信息 |
|
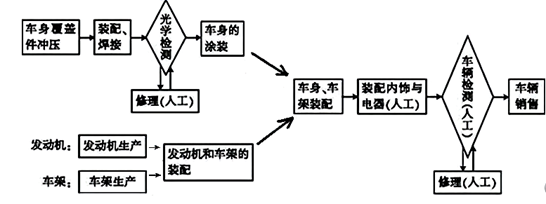
如图所示是某汽车组装厂的流程图。车身由组装厂生产,先冲压覆盖件,再装配、焊接,经光学检测后涂装车身。发动机、车架由他厂生产后运到组装厂,经组装后再与车身组装,人工装配内饰与电器,其中未说明人工实施的都是机械流水线完成。关于该汽车的组装流程说法正确的是( )
A . 发动机生产、车架生产是并行环节
B . 装配、焊接、车身的涂装是并行工序
C . 光学检测的目的是检测车身涂装的质量,不合格的必须人工修理
D . 车辆销售在车身、车架装配工序之前
|
|
| 10. 单选题 | 详细信息 |
|
随着现代农业技术的发展,农机自动驾驶导航系统代替人工转向操作已经成为现代农业的—个重要组成部分,由无线信号系统、导航控制器系统、转角控制系统、终端显示系统组成。农机自动驾驶导航的基本工作原理是:通过导航显示终端设定导航线,无线信号系统内的转角传感器、GNSS接收机获取拖拉机的实时位置和姿态,计算拖拉机与预设导航线偏离线的偏离距离和航向,导航控制器,驱动步进电动机转向结构,即时修正拖拉机方向轮的行驶方向。
|
|

高中通用技术 试卷推荐
- 浙江省金华市江南中学2019-2020学年高二下学期通用技术3月考试试卷
- 浙江省2019-2020学年通用技术学考卷四
- 福建省永安三中2019-2020学年高二下学期通用技术期初综合检测试试卷
- 浙江省2019-2020学年通用技术学考卷九
- 重庆市2020年高等职业教育分类通用技术模拟测试卷(六)
- 海南琼中中学2014-2015学年高一上学期通用技术期末考试试卷
- 陕西省2019年普通高中通用技术学业水平考试试卷
- 浙江省通用技术高考复习综合测试试卷(九)
- 浙江省温州新力量联盟2019-2020学年高二下学期通用技术期中联考试卷
- 浙江省2020年普通高校招生选考科目考试通用技术模拟卷10
- 浙江省温州市平阳县2020届高三通用技术普通高中选考适应性测试卷
- 浙江省2019年高考选考科目考试通用技术押题2
最近更新
- 声既可以传递信息,也可以传递能量。利用超声波“B超”可以更准确地诊断人体内部的器官是否患病,这是利用了声可以传递
- 对于豌豆的一对相对性状的遗传实验来说,必须具备的条件是 ①选作杂交实验的两个亲本一定要是纯种 ②选定的一对相对性状要有明
- 有关天然产物水解的叙述不正确的是( ) A.油脂水解可得到丙三醇 B.可用碘检验淀粉水解是否完全 C.蛋白质水解的最
- ---Would you mind if I open the window? ---______________, I
- 惯性是物体的固有属性,一切物体都具有惯性。如图1所示的四种物体中,惯性最大的是:
- 下列叙述正确的是 A.钠露置在空气中表面生成淡黄色的Na2O B.将SO2通入BaCl2溶液可生成BaSO3沉淀
- 如图,直线l y:= kx+b与直线l:y=mx+n交点为P(1,1),当y>y>0时,x的取值范围是___
- 干簧管(也叫干簧继电器)比一般机械开关结构简单、体积小、速度高、工作寿命长;而与电子开关相比,它又有抗负载冲击能力强的特
- 生物在紫外线、电离辐射等影响下将可能发生突变。这种突变易发生在() A.细胞减数分裂的第一次分裂时 B.细胞减数分裂的第
- 影响酶催化反应速率的因素有温度、反应物浓度、酶的浓度等。下图表示在最适温度下,某种酶的催化反应速率与反应物浓度之间的关
- 20.阅读下面的材料,根据要求写一篇不少于800字的文章。 英国《太阳报》曾以“世界上最大的快乐”为题,举办了一次有奖征
- 的展开式中,常数项为 .
- – Bob, ______ is it from your home toschool? – It’s about
- 阅读下面的文字,完成1-3题。 溴甲烷 溴甲烷,又称溴代甲烷或甲基溴,是一种无色无味的液体。它具有强烈的熏蒸作用,能杀灭
- 下列除去杂质的方法正确的是 物质 杂质 试剂 主要操作 A Cu Fe 盐酸 过滤 B CO2 CO O2 点燃
- — Do you think the weather is good enough for a picnic ? —
- 29. 关于辛亥革命与中国诞生的关系,指出:“研究中国的历史,还应该把党成立以前的辛亥革命和五四运动的材料研究一
- 被称之为“软电池”的纸质电池,采用一个薄层纸片作为传导体,在其一边镀锌,而在其另一边镀二氧化锰。在纸内的离子“流过”水
- 把重5N,体积为0.40dm3的物体投入水中,若不计水的阻力,当物体静止时,下列说法中正确的是g取10N/kg
- 友人要去远方,你去送别,友人哀伤愁苦,请你用《送杜少府之任蜀州》中的两句:“__________________,___



