浙江省金丽衢十二校&七彩阳光2023届高三下学期通用技术3月联考卷
浙江省金丽衢十二校&七彩阳光2023届高三下学期通用技术3月联考卷
教材科目:通用技术
试卷分类:高三下学期
文件类型:.doc
发布时间:2026-07-01
授权方式:免费下载
下载地址:点此下载
教材科目:通用技术
试卷分类:高三下学期
文件类型:.doc
发布时间:2026-07-01
授权方式:免费下载
下载地址:点此下载
以下为试卷部分试题预览
| 1. 单选题 | 详细信息 |
如图所示是一款室外智能巡检机器人,能够自主构建大场景高精度地图,实时准确定位,可检测异常行为及各种设备状态。下列关于该机器人的说法中不正确的是( )
A . 运用导航定位、图像智能识别与分析等多项技术体现了技术的综合性
B . 机器人前方配有雷达,符合设计的技术规范原则
C . 转轴结构使高清摄像头可 360°旋转,说明功能的实现需要相应结构来保证
D . 机器人检测技术的内容和体系复杂体现了技术的复杂性
|
|

| 2. 单选题 | 详细信息 |
小明要制作一个木质挂架,从结构稳固程度考虑,下列方案中最合理的是( )
A .
 C .
C .  D .
D . 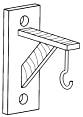
|
|
| 3. 单选题 | 详细信息 |
如图所示是某形体的主视图和左视图,相对应的俯视图是( )
A .
 B .
B . 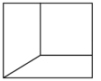 C .
C .  D .
D . 
|
|

| 4. 单选题 | 详细信息 |
通用技术实践课上,小明设计了如图所示的零件,实践室中台钻的最大钻孔直径为12mm,请根据题图完成问题。
|
|
| 5. 单选题 | 详细信息 |
小明准备在通用技术实践室用实木板制作一个如图所示的挂件,下列关于该挂件加工流程的分析合理的是( )
A . 用实木板加工时,先刨削再画线
B . 加工挂孔时,画线后先使用样冲冲眼后再打孔
C . 加工外形时,先用板锯锯直边,再用单刃刀锯锯曲边
D . 加工中间“心”型镂空部分时,先用手摇钻钻一排孔,再用钢丝锯锯割
|
|

| 6. 单选题 | 详细信息 |
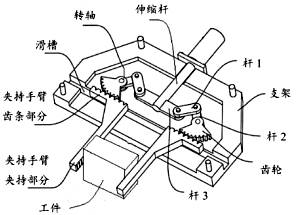
如图所示是一款液压伸缩杆夹持机构。其中转轴固定在支架上,夹持手臂沿滑槽直线移动以达到夹持或松开工件的效果。下列关于构件间连接方式和受力形式的分析中不正确的是( )
A . 夹持手臂与滑槽之间为动连接
B . 杆2与齿轮之间为铰连接
C . 当伸缩杆变短时,夹持手臂之间的距离缩短
D . 工件夹紧时,杆1主要受力形式为受压
|
|
| 7. 单选题 | 详细信息 |
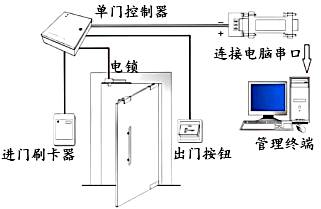
如图所示是某门禁控制系统示意图。该控制系统主要由单门控制器、电子阀门、进门刷卡器、出门按钮、电锁等部分组成。其工作原理是:出门按钮被按下或者进门刷卡器读取正确卡片信息后,单门控制器发出信号通过电子阀门使电锁断电,从而使电锁失去吸力。当门禁控制系统出现故障时,可通过管理终端来分析出现故障的原因。根据示意图及描述完成问题。
|
|
| 8. 单选题 | 详细信息 |
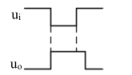
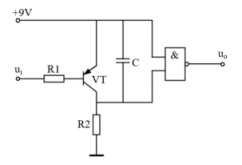
如图所示的信号处理电路,ui为输入信号,uo为输出信号,三极管VT工作在开关状态。下列输出波形与输入波形关系中正确的是( )
A .
 B .
B . 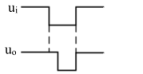 C .
C . 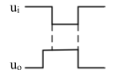 D .
D . 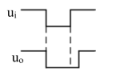
|
|
| 9. 单选题 | 详细信息 |
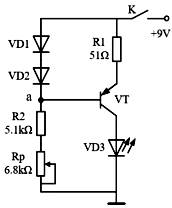
如图所示是小明设计的台灯模型的电路,开关 K 闭合后,VD3 亮。下列分析中正确的是( )
A . VD3亮时,VT处于饱和工作状态
B . VD3亮时,调大Rp的阻值,a点电位明显升高
C . VD3亮时,将R1阻值变为1kΩ,VD3亮度基本不变
D . VD3亮时,电源电压改变为12V,VD3亮度基本不变
|
|
| 10. 单选题 | 详细信息 |
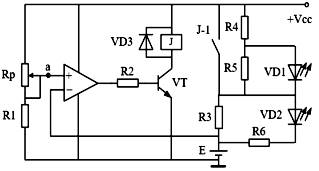
如图所示是具有快慢充功能的电池充电电路。E是充满电压为1.5V的充电电池;当电池充到1.42V后,转换为慢充;两个发光二极管分别指示快充和慢充状态。下列分析中不正确的是( )
A . 电阻R1可避免调试时电源与接地之间短路
B . 慢充时指示灯VD1亮,快充时指示灯VD2亮
C . 充电电池充到1.5V后,电路自动停止充电
D . 电路调试成功后,a点电压为1.42V
|
|
高中通用技术 试卷推荐
- 浙江省台州市临海开发区中学2020-2021学年高一上学期通用技术期中考试试卷
- 重庆市长寿区2021-2022学年高三上学期通用技术期末考试试卷
- 浙江省诸暨市海亮高级中学2021-2022学年高二上学期通用技术期中考试试卷
- 浙江省普通高中强基联盟协作体2021届高三下学期技术5月统测卷通用技术
- 浙江省杭州八校联盟2021-2022学年高二上学期期中联考通用技术试题
- 浙江省“七彩阳光”新高考研究联盟2021-2022学年高三上学期通用技术返校考试试卷
- 海南省东方市高级中学校2020-2021学年高二下学期通用技术期中考试试卷
- 浙江省金华市东阳市第二高级中学2020-2021学年高一上学期通用技术第三次月考试卷
- 新疆吐鲁番市高昌区第二中学2021-2022学年高二上学期通用技术期末考试试卷
- 广西钦州第四高级中学校2020-2021学年高二下学期通用技术第三周周测(3月)试卷
- 浙江省五校2021届高三下学期通用技术5月联考试卷
- 海南省儋州市2021-2022学年高一下学期通用技术期中考试试卷
最近更新
- 若,则ABC为( ) A.锐角三角形 B.直角三角形 C.钝角三角形 D.正三角形
- 工业冶炼金属铝的原理是2Al2O3=4Al+3O2↑,该反应属于A.置换反应 B.化合反应 C.分解反应
- 24.下列词语中,没有错别字的一组是( ) A.歉收 坐镇 余勇可贾 毁家纾难 B.雾霾
- 五四运动后,社会主义思想之所以在中国传播开来并成为新思潮的主流,直接原因是:( ) A.中国民族资本主义的
- 右图是人体局部内环境示意图,以下叙述正确的是 ( ) A
- 表现“食马者”以“知马者”身份叹息的语句是:
- 下列变化中,不属于化学变化的是A.用盐酸除去热水瓶中的水垢B.铜在潮湿的空气中生成铜绿C.使用汽油除去衣服上的油污D.福
- 魏源的《海国图志》和洪仁玕的《资政新篇》最突出的共同点是( ) A.都反映了向西方学习的主张 B.都代表了中国资产阶
- 下列物质中,不属于溶液的是 A.糖水 B.矿泉水 C.海水
- A few years after the card was made,the Postage Act waspasse
- 双子叶植物大麻(2N=20)为雌雄异株,性别决定为XY型,若将其花药离体培养,将幼苗用秋水仙素处理,所得植株的染色体组成
- 按要求填空。(两题任选一题) (1)但以刘 ,气息奄奄,人命危浅,
- 一定质量的某含碳化合物在空气中完全燃烧后,生成8.8g二氧化碳和5.4g水,则该化合物可能是() A.CH4 B.C3
- 一位现代学者在评论一部历史文献时说:“在这里,孔子已经换上了西装。”这一评论中的孔子形象应该是出自( ) A.董仲舒笔
- 现准备用“伏安法”测量额定电压为2.5V的小灯泡的电阻,实验室能提供的实验器材有:A.待测小灯光L(其正常工作时的电阻值
- 下列微粒只具有氧化性的是 A.Cu B.Cu2+ C.Cl- D.Cl2
- 科学家常用哺乳动物红细胞作材料来研究细胞膜的组成,是因为( ) A.哺乳动物红细胞容易得到 B.哺乳动物红细胞在水中容
- 在南方谈话中指出:社会主义要赢得与资本主义相比较的优势,就必须大胆吸收和借鉴人类社会创造的一切文明成果。在这一思想指导下
- 立方烷是一种新合成的烃,其分子为正立方体结构,其碳架结构如图所示(1)写出立方烷的分子式________. (2)其二氯
- 如图所示,虚线a、b、c代表电场中的三个等势面,相邻等势面之间的电势差相等,即Uab=Ubc,实线为一带正电的质点仅在电



